Robot móvil con brazo teleoperado mediante sistema inercial de captura de movimientos.
Robot móvil con brazo teleoperado mediante sistema inercial de captura de movimientos.
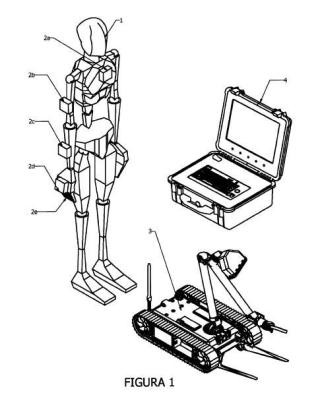
Consiste en un robot móvil autopropulsado (3), provisto de un brazo articulado teleoperado mediante un sistema que captura los movimientos del operador humano a través de una red de sensores inerciales (2a), (2b), (2c) y (2d) y los envía a una consola de control (4) que proyecta la posición de la mano del operador sobre el espacio de puntos alcanzables por el brazo del robot, calculando los movimientos de las articulaciones del mismo para conseguir que el extremo del brazo del robot describa una trayectoria análoga a la definida por el movimiento del brazo del operador humano. Asimismo, el sistema captura el grado de apertura de la mano del operador mediante un conjunto de sensores de flexión (2e) y reproduce dicho grado de apertura en la pinza ubicada en el extremo del brazo del robot.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201200653.
Solicitante: ROBOMOTION S.L.
Nacionalidad solicitante: España.
Inventor/es: GALBALLY HERRERO,David, ALEJANDRE GÓMEZ,Ángel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
Fragmento de la descripción:
ROBOT MÓVIL CON BRAZO TELEOPERADO MEDIANTE SISTEMA INERCIAL DE CAPTURA DE MOVIMIENTOS
SECTOR DE LA TÉCNICA
La presente invención se refiere a un robot móvil autopropulsado provisto de un brazo articulado teleoperado mediante un sistema de control que captura los movimientos del operador humano mediante una red de sensores inerciales y los reproduce en el brazo articulado del robot. De esta forma se consigue que el brazo articulado del robot describa una trayectoria análoga a la definida por el movimiento del brazo del operador humano, logrando una facilidad de manejo muy superior a la que se puede conseguir con los sistemas de control remoto actuales, típicamente basados en una consola de mandos. El robot móvil es del tipo de robots utilizados para llevar a cabo operaciones de riesgo tales como la manipulación de explosivos o la exploración de zonas potencialmente peligrosas.
ANTECEDENTES DE LA INVENCiÓN
Es habitual la utilización de robots móviles autopropulsados para la realización de operaciones de riesgo tales como la manipulación de explosivos o la exploración de áreas potencialmente peligrosas para el ser humano. Estos robots habitualmente disponen de orugas o ruedas propulsadas por uno o varios motores que permiten su desplazamiento por terrenos diversos, así como cámaras de visión que envían imágenes del entorno al operador humano, y un brazo articulado para la manipulación de objetos. Este tipo de robots permiten al operador humano la realización de misiones potencialmente peligrosas desde una distancia suficiente para garantizar su seguridad.
Este tipo de robots móviles provistos de un brazo articulado y utilizados para la realización de actividades potencialmente peligrosas se describen, por ejemplo, en los documentos de patente US7597162, US7654348, US8113304 Y ES2241490. Uno de los principales inconvenientes de este tipo de robots radica en la dificultad asociada al control del brazo robótico por parte del operador humano. Los robots móviles descritos en los documentos anteriores son controlados a distancia por medio de una consola de control que dispone de una pantalla en la que se muestran las imágenes proporcionadas por las cámaras del robot y una serie de palancas y botones que permiten controlar tanto la dirección y velocidad de desplazamiento del robot como el movimiento del brazo articulado en el espacio. El control de un brazo con varios tramos y articulaciones, de forma que el extremo del mismo describa la trayectoria deseada por el operador es una tarea compleja.
En los robots móviles existentes actualmente para la realización de actividades peligrosas que son controlados a distancia por medio de una consola de mandos se utilizan dos estrategias para el control del brazo.
La primera de las estrategias de control disponibles consiste en el movimiento secuencial de cada una de las articulaciones del brazo, buscando que la combinación de las rotaciones individuales de cada articulación produzca el desplazamiento deseado del extremo del brazo. Este método de control presenta el inconveniente de ser impreciso, debido a que es difícil para el operador estimar la rotación requerida en cada articulación para lograr el desplazamiento y velocidad deseados en el extremo del brazo. Asimismo, esta estrategia de control es lenta, debido a que no es posible controlar múltiples articulaciones de forma simultánea con una única consola de control.
La segunda estrategia de control requiere que el operador defina la trayectoria deseada para el extremo del brazo. En este caso el sistema de control calcula automáticamente las rotaciones y velocidades de cada articulación, de forma que la combinación de dichos movimientos produzca la trayectoria deseada en el extremo del brazo. En este caso la dificultad para el operador radica en la definición en tiempo real de la trayectoria deseada, típicamente tridimensional, mediante una serie de palancas y botones, habitualmente concebidos para el trabajo en entornos bidimensionales tales como la pantalla de un ordenador. Este problema puede evitarse mediante la programación anticipada de trayectorias habituales, tales como líneas rectas verticales y horizontales, círculos, elipses, etc., de forma que el operador seleccione el tipo de trayectoria deseada para cada ocasión. Esta solución tiene la limitación obvia de la imposibilidad de definir un conjunto de trayectorias pre-programadas suficientemente extenso como para cubrir todas las necesidades de movimiento del brazo en función de las condiciones operativas existentes en cada situación.
A partir de la descripción del estado del arte anterior se concluye que existen limitaciones y dificultades significativas para el control eficiente de los brazos articulados existentes en los robots móviles controlados remotamente, del tipo utilizado para la realización de actividades peligrosas tales como la manipulación de cargas explosivas. Esta dificultad puede resultar en errores durante la manipulación, ocasionando daños o consecuencias no deseadas tanto para el propio robot como para el entorno.
A la vista de lo expuesto anteriormente, un objeto de la presente invención es proporcionar un robot móvil con un brazo articulado que pueda ser teleoperado de forma intuitiva, permitiendo que el extremo de dicho brazo describa la trayectoria deseada por el operador de forma rápida y precisa.
DESCRIPCiÓN DE LA INVENCiÓN
Para lograr el objeto anterior, se proporciona de acuerdo con la presente invención un robot móvil cuyo medio de desplazamiento consiste en dos orugas, cada una de ellas ubicada en uno de los laterales del cuerpo del robot y accionada por un motor eléctrico. Ambos motores eléctricos son alimentados por un conjunto de baterías alojadas en el cuerpo del robot. El robot dispone de varias cámaras de vídeo y sensores de distancia que envían, mediante señales inalámbricas, información del entorno a una consola de control que está en posesión del operador. Esta consola de control presenta de forma gráfica la información enviada por los sensores y cámaras ubicadas sobre el robot, permitiendo que el operador controle el movimiento de las orugas mediante una palanca que determina su dirección de movimiento hacia adelante, atrás, izquierda o derecha.
Asimismo, el robot dispone de un brazo articulado fijado a la superficie superior del cuerpo. Cada una de las articulaciones de las que consta el brazo dispone de un motor que permite la rotación de la articulación con respecto a su eje de giro. En el extremo del brazo se ubica una pinza para la manipulación de objetos.
El operador dispone de varios sensores inerciales ubicados entre el hombro y la mano de uno de sus dos brazos, además de un sensor de referencia ubicado en su torso. Estos sensores inerciales determinan la orientación relativa del miembro sobre el que se encuentran fijados con respecto a la orientación del sensor de referencia ubicado en el torso del operador. Conociendo dichas posiciones relativas de los diferentes sensores es posible calcular la posición instantánea de la mano del operador en el espacio. El algoritmo del sistema de control captura dicha posición instantánea de la mano del operador y la proyecta sobre el espacio de posiciones alcanzables por el brazo robótico, obligando a éste que se desplace siguiendo una trayectoria análoga a la descrita por la mano del operador.
El sistema de captura de movimientos del operador se completa con un guante provisto de sensores de flexión que transmiten el ángulo de cada uno de los dedos de la mano. Estos sensores de flexión se utilizan para controlar la apertura o cierre de la pinza ubicada en el extremo del brazo robótico.
BREVE DESCRIPCiÓN DE LOS DIBUJOS
Para la mejor comprensión de cuando queda descrito en la presente memoria, se acompañan unos dibujos en los que, tan sólo a título de ejemplo, se representa un caso práctico de realización del robot móvil con brazo teleoperado mediante sistema inercial de captura de movimientos.
Figura 1. Muestra una vista isométrica del sistema completo, incluyendo el robot móvil con brazo articulado, el operador provisto de sensores inerciales y la consola de control en la que se encuentra el algoritmo de control del robot, y sobre cuya pantalla se muestra la información proporcionada por los sensores del robot.
Figura 2. Muestra un esquema del operador con los diferentes sensores de captura de movimientos ubicados sobre su cuerpo. Para cada sensor inercial se representa su sistema de coordenadas local, que proporciona la orientación del miembro del operador sobre el cual se encuentra fijado.
Figura 3. Muestra una vista del robot móvil descrito como realización preferida de la invención, identificando los...
Reivindicaciones:
1. Un robot móvil autopropulsado provisto de un brazo articulado teleoperado mediante un sistema inercial de captura de movimientos que comprende los siguientes elementos: -Un conjunto de sensores inerciales fijados al cuerpo del operador (2a) , (2b) , (2c) y (2d) ; que determinan continuamente la posición de su torso, brazo, antebrazo y mano en el espacio. -Un conjunto de sensores de posición fijados al brazo articulado del robot que determinan continuamente la posición de su extremo en el espacio. -Una consola de control (4) que recibe los datos de posición del extremo del brazo del robot y de la mano del operador, proyecta la posición de la mano del operador sobre el espacio de puntos alcanzables por el brazo del robot, y controla el movimiento de las articulaciones del robot alrededor de sus respectivos ejes de rotación, de forma que la posición del extremo del brazo articulado coincide en todo momento con la posición de la mano del operador proyectada sobre el espacio de puntos alcanzables por el brazo del robot.
2. Un robot móvil autopropulsado provisto de un brazo articulado teleoperado mediante un sistema inercial de captura de movimientos, según la reivindicación 1, que contiene una pinza en el extremo del brazo del robot de forma que permite la manipulación de objetos.
3. Un robot móvil autopropulsado provisto de un brazo articulado teleoperado mediante un sistema inercial de captura de movimientos, según la reivindicación 1, caracterizado por el hecho de que la comunicación entre la consola de control, el robot móvil y la red de sensores inerciales se realiza mediante señales inalámbricas.
4. Un robot móvil autopropulsado provisto de un brazo articulado teleoperado mediante un sistema inercial de captura de movimientos, según las reivindicaciones anteriores, que contiene cinco sensores resistivos de flexión (2e) adheridos longitudinalmente a los dedos de una de las manos del operador, de forma que miden el grado de apertura de la mano del operador.
5. Un robot móvil autopropulsado provisto de un brazo articulado teleoperado mediante un sistema inercial de captura de movimientos, según las reivindicaciones anteriores, caracterizado por el hecho de que la consola de control recibe la información del grado de apertura de los cinco sensores resistivos de flexión (2e) que determinan el grado de apertura de la mano del operador, y reproduce dicha apertura en la pinza del robot, de forma que el operador puede abrir y cerrar la pinza de forma remota.
6. Un robot móvil autopropulsado provisto de un brazo articulado teleoperado mediante un sistema inercial de captura de movimientos, según las reivindicaciones anteriores, caracterizado por el hecho de que la consola de control muestra visualmente en una pantalla la información transmitida por los sensores y cámaras del robot, así como la posición del brazo articulado del robot, la posición de la mano del
operador proyectada sobre el espacio del robot, y el error relativo entre ambas posiciones.
7. Un robot móvil autopropulsado provisto de un brazo articulado teleoperado mediante un sistema inercial de captura de movimientos, según las reivindicaciones anteriores, caracterizado porque el algoritmo de control es independiente del número de articulaciones y de la geometría del brazo articulado montado sobre el robot móvil, de forma que es posible sustituir el brazo articulado sin necesidad de modificar el sistema de control.
FIGURA 1
, .. --2a
- -2c
FIGURA 2
FIGURA 3
(xo, yo, Zo FIGURA 4
I -:. .......
.......1
./ ....
~"
./ I
./ l'-'f ./ ...j'>'
./
./
I ~" \
301\// ./
./
I ./ ...j" I ~ ./
...j"/ I ./ ./ ./ I ...j" \
A
./
./ \ I
/
/
/~"
/
/
...j"
/./
( I
I
1....
./
,
I
FIGURA 5
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
Manipulador de alimentos en un almacén, del 13 de Mayo de 2020, de Imaginalis S.r.l: Un manipulador de alimentos (1a) en un almacén ; comprendiendo dicho almacén una pluralidad de estaciones de almacenamiento (1b) en las que […]
Mecanismo de despliegue para normalización pasiva de un instrumento con relación a la superficie de una pieza de trabajo, del 1 de Enero de 2020, de SAUDI ARABIAN OIL COMPANY: Un aparato que se configura para transportar un instrumento y desplegar opcionalmente el instrumento en relación con una superficie que comprende: […]
Fabricación de producción ultraflexible, del 13 de Noviembre de 2019, de ABB SCHWEIZ AG: Un sistema de fabricacion que comprende: una pluralidad de celdas de trabajo , donde cada una de dichas celdas realiza uno o mas procesos […]
Aparato de distribución de carga de rueda magnética, del 21 de Agosto de 2019, de Tas Global Co., Ltd: Un aparato para limpiar el fondo de un barco en el que un aparato de distribución de carga comprende: una pluralidad de ruedas magnéticas para […]
Cortadora de alto rendimiento con pinza adaptada por unión de materiales, del 7 de Agosto de 2019, de GEA Food Solutions Germany GmbH (100.0%): Cortadora de alto rendimiento que presenta una cuchilla que corta lonchas de producto alimenticio de uno de los extremos de […]