CIP-2021 : G05D 1/00 : Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres,
acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
CIP-2021 › G › G05 › G05D › G05D 1/00[m] › Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
G05D 1/02 · Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
G05D 1/03 · · que utilizan sistemas de transmisión por proximidad de campo, p. ej. del tipo de bucle inductivo.
G05D 1/04 · Control de la altitud o de la profundidad.
G05D 1/06 · · Régimen de modificación de la altitud o de la profundidad.
G05D 1/08 · Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
G05D 1/10 · Control de la posición o del rumbo en las tres dimensiones simultáneamente (G05D 1/12 tiene prioridad).
G05D 1/12 · Control para la búsqueda de un objetivo.
CIP2021: Invenciones publicadas en esta sección.
USO DE DERIVADOS DE NITRILO COMO MEDICAMENTO.
(16/03/2007) Uso de un compuesto de fórmula (I): (Ver fórmula) en la que: A es un anillo de 6 miembros que contiene opcionalmente un doble enlace, y que contiene opcionalmente un átomo de oxígeno o un grupo NR en el anillo; R es hidrógeno o alquilo C1_6; R1 y R2 son, independientemente, alquilo C1_6 o cicloaquilo C3_6, los cuales pueden contener opcionalmente uno o más grupos O, S o NR3, o R1 y R2, junto con el átomo de nitrógeno al que están unidos, forman un anillo de 3, 4-dihidroisoquinolina o un anillo saturado de 5 ó 6 miembros que contiene opcionalmente un átomo de O, S ó N adicional, y está sustituido opcionalmente con un grupo -(CH2)p-R6, en el que p es 0 a 3 y R6 es alquilo C1_6, CONR7R8, en el que R7 y R8 son independientemente hidrógeno, alquilo C1_6 que puede contener opcionalmente uno o más grupos O, S o NR3, o, junto con el átomo…
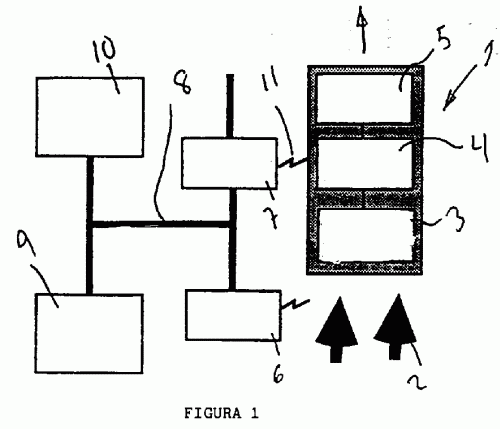
SISTEMA PARA ACCIONAR AUTOMATICAMENTE UNOS DISPOSITIVOS HIPERSUSTENTADORES DE UNA AERONAVE, EN PARTICULAR UNAS ALETAS AUXILIARES EN EL BORDEDE ATAQUE DE ALA.
(16/02/2007) Sistema para accionar automáticamente dispositivos hipersustentadores de una aeronave en particular las aletas auxiliares móviles de borde de ataque de ala , que son susceptibles de ser desplegados y replegadas, comportando dicho sistema : - unos medios de accionamiento , para desplazar dichos dispositivos hipersustentadores en función de órdenes de mando recibidas; - al menos un órgano de mando susceptible de ser accionado por un piloto de la aeronave ; y - una unidad de mando que comporta un medio de mando que es susceptible de generar órdenes de mando, en función del accionamiento de dicho órgano de mando , para accionar dichos medios de accionamiento de modo que estos últimos lleven dichos …
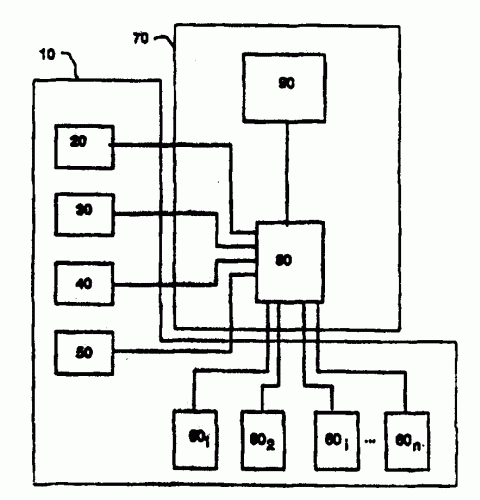
SISTEMA Y METODO DE FUSION DE SENSORES PARA ESTIMAR POSICION, VELOCIDAD Y ORIENTACION DE UN VEHICULO, ESPECIALMENTE UNA AERONAVE.
(16/11/2006) Sistema y método de fusión de sensores para estimar posición, velocidad y orientación de un vehículo, especialmente una aeronave. Sistema para estimar posición, velocidad y orientación de un vehículo , que comprende medios para determinar las componentes, según ejes cuerpo del vehículo, de dos vectores unitarios constantes no colineales; medios para determinar las componentes, según ejes tierra, de dichos vectores unitarios constantes no colineales; medios para determinar las tres componentes de velocidad angular del vehículo en ejes cuerpo; medios para corregir dicha velocidad angular con una corrección y obtener una velocidad…
PROCEDIMIENTO DE TELEDIRECCION PARA UN VEHICULO AEREO SIN PILOTO.
(16/11/2006) Procedimiento de teledirección para el mando de un vehículo aéreo (UAV) sin piloto por medio de un receptor de radio previsto a bordo y de vanos radioeléctricos desde una estación de dirección, en el que tiene lugar sobre el vano de radio una transmisión de imágenes del UAV a la estación de dirección, al mismo tiempo, el UAV también puede ser gobernado automáticamente por medio de un sistema de conducción del vuelo preprogramable previsto a bordo, que el UAV puede ser volado a elección automáticamente bajo el mando automático del sistema de conducción del vuelo propio instalado a bordo sobre una ruta de seguridad preprogramada o, en caso necesario, puede ser guiado por la estación de dirección sobre un pasillo de vuelo teledirigido y que en el caso de una interrupción de la comunicación vía radio entre el UAV y la estación…
PROCEDIMIENTO PARA DETERMINAR UNA VELOCIDAD MINIMA DE CONTROL DE UNA AERONAVE.
(01/06/2006). Ver ilustración. Solicitante/s: AIRBUS FRANCE. Inventor/es: BURSON, DAVID.
Procedimiento para determinar en una aeronave provista de una pluralidad de motores una velocidad mínima de control con al menos un motor apagado, procedimiento según el cual: a) en el curso al menos de un vuelo de dicha aeronave, se miden en dicha aeronave los valores de derrapaje â, de la fuerza lateral Cy y del momento de guiñada Cnf; b) a partir de dichas mediciones y de al menos un valor de certificación predefinido, se determina un valor de certificación Cnfcertif del momento de guiñada Cnf creado por el apagado del motor; c) a partir de dicho valor de certificación Cnfcertif, se calcula el valor de un parámetro K que permita formar una primera relación Äfn = K.Vc2 en la cual: - Äfn ilustra la disimetría de empuje debida al apagado del motor; y - Vc representa la velocidad de la aeronave; y d) a partir de dicha primera relación y de curvas de empuje de los motores, se determina dicha velocidad mínima de control.
PROCEDIMIENTO Y APARATO PARA EL CONTROL DE LA POSICION DE AERONAVES EN MANIOBRAS EN TIERRA DESPUES DEL ATERRIZAJE.
(16/07/2005). Ver ilustración. Solicitante/s: TEAM, TECNOLOGIA EUROPEA APLICADA AL MOVIMIENTO, S.L. Inventor/es: SIBILS ENSESA,JAVIER.
Procedimiento y aparato para el control de la posición de aeronaves en maniobrasen tierra después del aterrizaje. El procedimiento comprende la captación continuada de la zona de aproximación de la aeronave a controlar mediante una cámara termográfica; detección del punto de máxima actividad de la imagen termográfica captada, que corresponde a las ruedas de la aeronave, hacer el seguimiento continuo del punto de mayor temperatura detectado a lo largo de la imagen enviando las señales sucesivas a un dispositivo de control para determinar, basado en las imágenes transmitidas por la cámara termográfica, la distancia en las ruedas delanteras de la aeronave al punto de parada así como la desviación lateral con respecto a la línea de aproximación, transmitiendo dicha información a un panel indicador visible para el piloto.
PROCEDIMIENTO Y DISPOSITIVO PARA LA DETECCION CUANDO INICIA EL VUELO UN AVION EN CURSO DE DESPEGUE.
(01/07/2005) Procedimiento para la detección del inicio del vuelo de un avión en curso de despegue, caracterizado porque: - en el curso del proceso de despegue, tanto durante la fase de rodadura sobre el suelo como durante la fase de inicio del vuelo, se calcula la magnitud A = K.h + è, en la cual: . è representa el ángulo de inclinación longitudinal del avión, . h representa la altura, en relación con el suelo, de la zona (5A) de la cola de dicho avión que tocaría el suelo si el ángulo de inclinación longitudinal è adquiriera un valor demasiado elevado durante el despegue, y . K es una constante igual a la inversa de la distancia longitudinal (L) que separa dicha zona de cola (5A) de las articulaciones…
SISTEMA DE CONTROL PARA AERONAVES.
(16/05/2005). Ver ilustración. Solicitante/s: BAE SYSTEMS PLC. Inventor/es: DARBYSHIRE, IAN THOMAS.
Un sistema de control de aviones que tiene: medios para detectar una irregularidad en el manejo del avión durante el vuelo; medios sensibles a una salida de los medios de detección para causar una excitación de fuselaje rígido en al menos una parte del avión; medios para controlar una respuesta real a la excitación de fuselaje rígido; medios para efectuar una comparación de la respuesta real con una respuesta objetivo del avión a la excitación de fuselaje rígido; y medios sensibles a una salida de los medios de comparación para determinar la necesidad de una modificación del plan de vuelo actual para ocuparse de la irregularidad y para generar una salida de control correspondiente.
SISTEMA PARA LA OPTIMIZACION DE LA TRAYECTORIA EN VEHICULOS.
(16/05/2005) Sistema para la optimización de la trayectoria en vehículos. Está previsto para conseguir optimizar, ya sea en tiempo real o en post-proceso, la trayectoria de un móvil o vehículo de competición en circuitos cerrados o abiertos, basándose en la utilización de un subsistema de posicionamiento que utiliza un sistema GPS diferencial de fase que proporciona de manera precisa y fiable el posicionamiento del móvil o vehículo , y determina la trayectoria de éste en tiempo real post-proceso, con precisiones centimétricas. Además, incluye un subsistema telemétrico para la utilización de adquisición de datos telemétricos , basándose en la disposición de una serie de sensores y un colector de datos…
SISTEMA PARA ACCIONAR AUTOMATICAMENTE UNOS DIPSOSITIVOS HIPERSUSTENTADORES DE UNA AERONAVE DURANTE EL DESPEGUE.
(01/04/2005) Sistema para accionar automáticamente unos dispositivos hipersustentadores de una aeronave , con ocasión de una fase de despegue de dicha aeronave , comportando dicho sistema (1A, 1B): - unos medios de accionamiento accionables, para desplazar dichos dispositivos hipersustentadores ; y - una unidad de mando (16A, 16B) susceptible de generar unas órdenes de mando, para controlar dichos medios de accionamiento de modo que estos últimos lleven dichos dispositivos hipersustentadores a una posición determinada, siendo llevados dichos dispositivos hipersustentadores al principio de la fase de despegue a una primera posición, en la cual están desplegados, donde el sistema comporta, además, un primer medio para detectar un despegue efectivo de la aeronave , correspondiente al momento en…
SISTEMA DE MANDO ELECTRICO PARA UN TIMON DE DIRECCION DE AERONAVE.
(16/01/2005) Sistema de mando eléctrico para un timón de dirección de aeronave, estando dicho timón montado rotativo alrededor de un eje (Z-Z) para poder tomar cualquier posición angular dentro de un margen de recorrido que se extiende a ambos lados de la posición neutra del timón y limitada a cada lado de esta posición neutra por un valor máximo de recorrido (M), y comportando dicho sistema: - una palanca de pedales accionada por el piloto y asociada a un transductor que emite una orden eléctrica de pilotaje (y) representativa de la acción del piloto sobre dicha palanca de pedales ; y - un accionador que recibe una orden de mando (c) derivada de dicha orden de pilotaje…
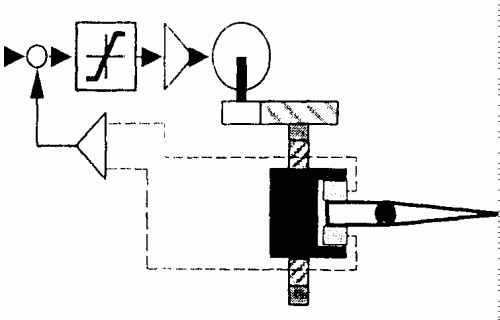
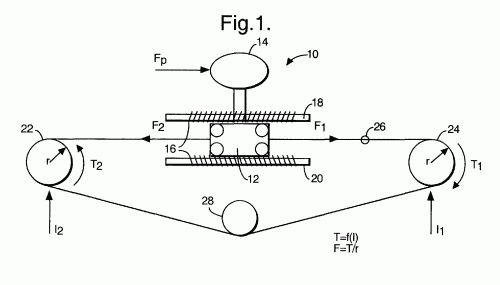
SERVO-POSICIONADOR DE ALERON REALIMENTADO POR PAR DE CARGA.
(16/09/2004). Ver ilustración. Solicitante/s: UNIVERSIDAD DE A CORUÑA. Inventor/es: FERREIRO GARCIA,RAMON.
Servo-posicionador de alerón realimentado por par de carga. La presente invención se refiere a la realimentación de un servo- posicionador del alerón o timón de vehículos aeroespaciales mediante la transducción del par mecánico desarrollado por el alerón sobre el vehículo. La captación del par así como su transducción se realiza por cualquier medio físico accesible a la técnica (eléctricos, electrónicos, electromagnéticos, hidráulicos), así como por medio de combinaciones de ambos, incluyendo tanto fibra óptica como medios inalámbricos. Con este método de realimentación del servo-posicionador del alerón, se prescinde de la clásica realimentación basada en la medida de la posición angular del alerón, con lo que se obtienen mejoras del comportamiento en cuanto a estabilidad y precisión en condiciones ambientales adversas como consecuencia de la eliminación del efecto dinámico de la no linealidad originada por la posición angular del alerón.
PROCEDIMIENTO Y DISPOSITIVO DE MANDO DE UN MECANISMO DE GOBIERNO DE INCLINACION O DE PROFUNDIDAD DE UNA AERONAVE.
(01/05/2004). Ver ilustración. Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: GAUTIER, JEAN-PIERRE, ORTEGA, JEAN-MARC.
LA INVENCION SE REFIERE AL MECANISMO DE ACCIONAMIENTO DEL TIMON DE INCLINACION O DE PROFUNDIDAD DE UNA AERONAVE. CONSTA AL MENOS DE DOS ACCIONADORES , CADA UNO DE LOS CUALES TIENE POR LO MENOS UNA ENTRADA DE MANDO ELECTRICO (111A, 113A, 115 ). AL MENOS UNO DE LOS ACCIONADORES , DENOMINADO MIXTO, INCLUYE ADEMAS UNA ENTRADA DE MANDO MECANICO (115B). UN SISTEMA DE PILOTAJE ELECTRICO DE LOS ACCIONADORES PERMITE ALCANZAR UN ESTADO DENOMINADO DE VUELO NORMAL, EN EL QUE AL MENOS UNO DE LOS ACCIONADORES ACCIONA EL TIMON , UN ESTADO DENOMINADO DE MANIOBRA, EN EL QUE AL MENOS DOS ACCIONADORES ACCIONAN EL TIMON, Y UN ESTADO DE AVERIA DEL PILOTAJE ELECTRICO, EN EL QUE EL ACCIONADOR MIXTO , PILOTADO A TRAVES DE LA ENTRADA DE MANDO MECANICO, ACCIONA EL TIMON.
SISTEMA DE CONTROL PARA INCREMENTAR LA SEGURIDAD EN UN VEHICULO RAPIDO, ESPECIALMENTE PARA UN VEHICULO GUIADO POR UN OPERADOR QUE PUEDE ESTAR LOCALIZADO DENTRO O FUERA DEL VEHICULO, INSTALADO PARA GUIAR UN VEHICULO Y METODO PARA CONTROLAR UN VEHICULO POR EL SISTEMA CORRESPONDIENT.
(16/11/2003). Solicitante/s: DASSAULT ELECTRONIQUE. Inventor/es: LE GUSQUET, FREDERIC, TISSEDRE, MARC, SAGLIO, CHRISTOPHE, SALANSON, PHILIPPE.
EL SERVOMECANISMO, EN RESPUESTA A LA CONSIGNA DE REFERENCIA RELATIVA A LA VELOCIDAD LONGITUDINAL DEL VEHICULO, ADAPTA, EN TIEMPO REAL, LA CONSIGNA-ACCIONADOR DEL ORGANO MOTOR HASTA QUE LA CONSIGNA-ACCIONADOR DEL ORGANO DE DIRECCION SE CORRESPONDA CON LA CONSIGNA DE REFERENCIA RELATIVA, LO QUE PERMITE PROTEGER, INCLUSO A GRAN VELOCIDAD LONGITUDINAL, LOS DESPLAZAMIENTOS LONGITUDINAL Y TRANSVERSAL DEL VEHICULO. APLICACION EN EL GUIADO DE UN VEHICULO TERRESTRE RAPIDO POR UN OPERADOR EMBARCADO O NO EN DICHO VEHICULO.
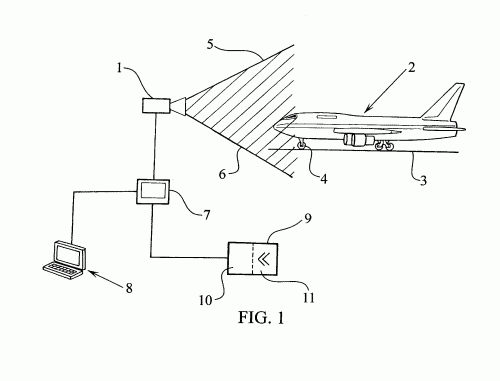
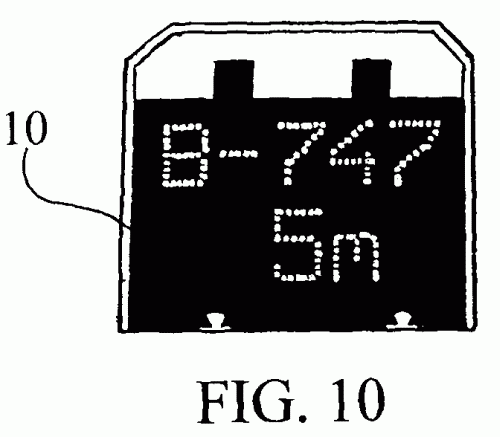
PROCEDIMIENTO Y APARATO PARA EL GUIADO DE AERONAVES EN MANIOBRA DE ATRAQUE.
(16/10/2003). Ver ilustración. Solicitante/s: TEAM, TECNOLOGIA EUROPEA APLICADA AL MOVIMIENTO, S.L. Inventor/es: SIBILS ENSSESA,JAVIER, PEREZ PEREZ,ALBERT.
Procedimiento y aparato para el guiado de aeronaves en maniobra de atraque. El aparato comprende una o dos cámaras de vídeo conectadas a una unidad central de proceso susceptible de comparar las informaciones recibidas desde las cámaras de vídeo con datos tabulados para la validación del tipo de avión y para el envío de órdenes de información a unas pantallas indicadoras a base de leds visibles para el piloto en fase de aproximación y susceptibles de facilitar al mismo informaciones visuales sobre distancia al punto previsto de paro, velocidad de la aeronave en comparación con valores teóricos previstos, desviación lateral de la aero-nave y mensajes para la continuación o interrupción de la maniobra, presentando asimismo el aparato una consola conectada a la unidad central de proceso para la introducción de otros datos.
SISTEMA DE CONTROL ELECTRONICO REGULADO PARA AVION.
(01/07/2003). Ver ilustración. Solicitante/s: BRITISH AEROSPACE PUBLIC LIMITED COMPANY. Inventor/es: WILSON, EDWARD, BRITISH AEROSPACE DEFENCE LTD.
SE PRESENTA UN APARATO ELECTRONICO DE CONTROL QUE COMPRENDE: UN ELEMENTO DE CONTROL MOVIL ; UN MEDIO DE BUCLE DE SERVOCONTROL POSICIONAL QUE INCLUYE AL MENOS UN MEDIO MOTOR Y QUE PUEDE ACCIONARSE PARA MANTENER LA POSICION DEL ELEMENTO DE CONTROL EN CUALQUIER POSICION DE UNA SERIE DE POSICIONES EN LA BANDA DE MOVIMIENTO DEL MISMO, DE ACUERDO CON UNA SEÑAL DE DEMANDA; MEDIOS DE DETECCION DE FUERZA PARA DETECTAR UNA FUERZA APLICADA AL ELEMENTO DE CONTROL Y PARA SUMINISTRAR AL MEDIO DE BUCLE DE SERVOCONTROL UNA SEÑAL DE DEMANDA QUE VARIA EN FUNCION DE LA MAGNITUD DE LA FUERZA APLICADA.
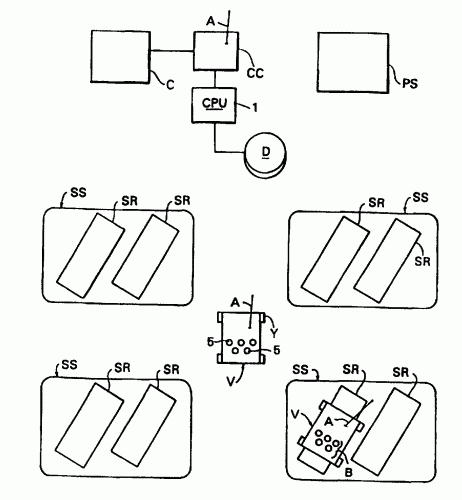
INSTALACION DE FABRICACION Y OPERACIONES DE PROCESO.
(16/03/2003). Ver ilustración. Solicitante/s: HECKETT MULTISERV PLC. Inventor/es: EVANS, DARREL, HECKETT MULTISERV PLC, KIRKWOOD, CLYDE, ALEXANDER, HECKETT MULTISERV PLC.
LA POSICION ABSOLUTA DE UN VEHICULO (V) QUE TRANSPORTA ARTICULOS ENTRE PUESTOS (SS) DE UNA INSTALACION, P. EJ. LOS TALLERES DE UNA ACERIA, SE DETERMINA POR MEDIO DE UNA SEÑAL DE NAVEGACION POR SATELITE Y SE REGISTRA EN UNA UNIDAD CENTRAL DE PROCESO CON UNA BASE DE DATOS PARA ASEGURAR QUE LOS ARTICULOS PREVISTOS (SR) SE PROCESEN EN LOS DIFERENTES PUESTOS SEGUN CORRESPONDA.
APARATO DE SEGUIMIENTO DEL MOVIMIENTO PARA VEHICULO AUTOGUIADO.
(01/01/2003). Solicitante/s: JERVIS B. WEBB INTERNATIONAL COMPANY. Inventor/es: ALOFS, DRENTH.
LA INVENCION SE REFIERE A UNA RUEDA GIRATORIA AJUSTADA CON SENSORES DE MEDIDA DEL ANGULO ROTACIONAL Y DE GIRO MONTADA EN UN VEHICULO SIN CONDUCTOR DE MANERA QUE EL MOVIMIENTO LATERAL DEL VEHICULO PUEDE SER DETECTADO Y ANOTADO MEDIANTE EL SISTEMA DE NAVEGACION Y GUIA DEL VEHICULO. UNA REALIZACION PREFERIDA DE LA INVENCION ES UN VEHICULO SIN CONDUCTOR QUE COMPRENDE UNA SISTEMA DE NAVEGACION Y GUIA QUE TIENE UN SENSOR DEL MOVIMIENTO ANGULAR Y UN DISPOSITIVO DE RUEDA GIRATORIA PARA EL SEGUIMIENTO DE LA TRAYECTORIA EQUIPADO CON UN SENSOR DE PIVOTADO DE LA RUEDA GIRATORIA Y UN SENSOR DE GIRO DE LA RUEDA PARA DETERMINAR LA POSICION RELATIVA DEL VEHICULO TENIENDO EN CUENTA SUBSTANCIALMENTE TODO EL MOVIMIENTO DEL VEHICULO A LO LARGO DE LA SUPERFICIE SOBRE LA CUAL SE ESTA MOVIENDO EL VEHICULO. ESTOS SENSORES HACEN POSIBLE QUE EL SISTEMA DE NAVEGACION DETERMINE MAS EXACTAMENTE LA POSICION ACTUAL DE LOS VEHICULOS Y HACEN POSIBLE QUE EL SISTEMA DE GUIA GUIE MEJOR EL VEHICULO.
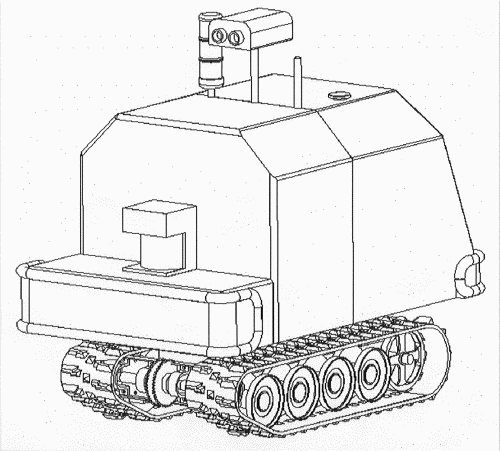
ROBOT MOVIL TRACCIONADO POR CADENAS CON CAPCAIDAD DE OPERACION AUTONOMA Y TELEOPERADA.
(16/02/2002). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Inventor/es: FERNANDEZ RAMOS,RAQUEL, GARCIA CEREZO,ALFONSO JOSE, PEDRAZA MORENO,SALVADOR.
Robot móvil traccionado por cadenas con capacidad de operación autónoma y teleoperada, que comprende un sistema de locomoción por cadenas con direccionamiento por deslizamiento, un sistema de alimentación eléctrica por grupo autógeno, un sistema sensorial para control y monitorización remota, un sistema de alarma por indicador luminoso y acústico, un sistema de comunicaciones radio con la estación remota y un sistema de control basado en una red de computadores. Está preparado para desenvolverse en terrenos de difícil transitabilidad y para trabajar en entornos hostiles y peligrosos en tareas de inspección, vigilancia, transporte y asistencia.
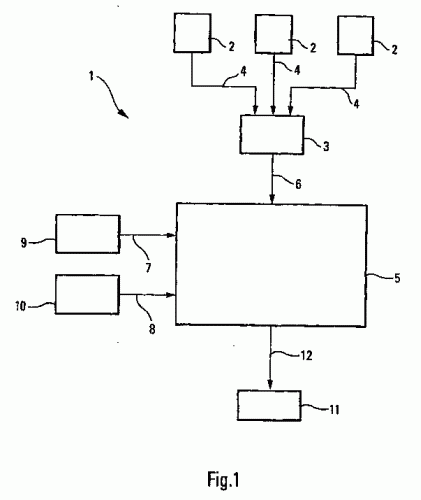
PROCEDIMIENTO Y DISPOSITIVO PARA LA GUIA ASISTIDA AUTOMATICAMENTE DE AERONAVES HACIA UNA POSICION DE APARCAMIENTO Y SISTEMA DE GESTION ASOCIADO.
(01/12/2001) Procedimiento para la guía asistida automáticamente de aeronaves hacia una posición de aparcamiento, con el que se transmiten al control de una aeronave de forma automática instrucciones de corrección de la dirección y de la velocidad, donde por medio de al menos una cámara de vídeo (6, 6', 7, 7') es detectada con la cámara de vídeo (6, 6', 7, 7') una aeronave , que se encuentra en una zona de aparcamiento situada en una región de detección (alfa 1, alfa 2) de al menos una cámara de vídeo (6, 6', 7, 7', y las señales alimentadas por la cámara de vídeo (6, 6', 7, 7') son procesadas en una unidad de evaluación para la…
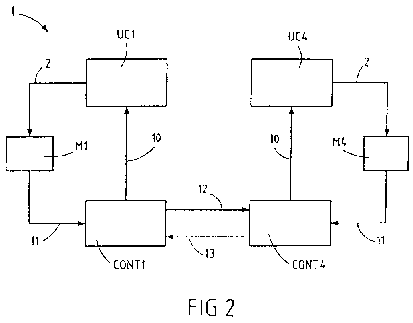
DISPOSITIVO DE CONTROL DEL EMPUJE DE UNA AERONAVE DE PLURACIDAD DE MOTORES.
(01/03/2001). Ver ilustración. Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: LARRAMENDY, PANXIKA, ZACCARIA, PATRICK, CLAVEL, THIERRY, GARAVEL, FRANCOIS.
LA PRESENTE INVENCION, QUE CONSISTE EN UN DISPOSITIVO DE CONTROL DEL EMPUJE DE UNA AERONAVE DE VARIOS MOTORES (M1, M4), COMPRENDE UNIDADES DE CALCULO (UC1, UC4) QUE DETERMINAN LAS PRIMERAS ORDENES DE ACCIONAMIENTO DE LOS REGIMENES DE LOS MOTORES. SEGUN LA INVENCION, EL DISPOSITIVO COMPRENDE ADEMAS MEDIOS DE CONTROL (CONT1, CONT4) DE LOS DOS MOTORES EXTERIORES (M1, M4), MEDIOS DE CALCULO QUE DETERMINAN LAS SEGUNDAS ORDENES DE ACCIONAMIENTO DEL REGIMEN DE LOS MOTORES EXTERIORES (M1, M4), OBTENIENDOSE ASI UNA REDUCCION DEL EMPUJE, Y MEDIOS DE CONMUTACION QUE, EN FUNCIONAMIENTO NORMAL DE LOS MOTORES EXTERIORES (M1, M4), TRANSMITEN A ESTOS LAS PRIMERAS ORDENES DE ACCIONAMIENTO Y, EN CASO DE FALLO DE ALGUN MOTOR EXTERIOR (M1), TRANSMITEN AL MOTOR EXTERIOR OPUESTO (M4) LAS SEGUNDAS ORDENES DE ACCIONAMIENTO.
DISPOSITIVO DE VIGILANCIA DE UN SISTEMA COMPLEJO, EN PARTICULAR DE UN AVION.
(16/08/2000). Solicitante/s: AEROSPATIALE MATRA. Inventor/es: LAUTA, RAYMOND, LEJARRE TATHAM, LYDIE.
LA PRESENTE INVENCION SE REFIERE A UN DISPOSITIVO DE VIGILANCIA DE UN SISTEMA COMPLEJO QUE COMPRENDE UNA UNIDAD CENTRAL , SUSCEPTIBLE DE TRANSMITIR A UN MEDIO DE VISUALIZACION INFORMACIONES DE VIGILANCIA, VISUALIZANDO DICHO MEDIO DE VISUALIZACION MENSAJES RELATIVOS A LAS INFORMACIONES RECIBIDAS. SEGUN LA INVENCION, LA UNIDAD CENTRAL ESTA CARGADA DE UNA BASE DE DATOS DOTADA DE INFORMACIONES COMPLEMENTARIAS, INDICA EN EL MOMENTO DE LA TRANSMISION DE UNA INFORMACION DE VIGILANCIA LA EXISTENCIA DE UNA INFORMACION COMPLEMENTARIA, Y EL MEDIO DE VISUALIZACION ES SUSCEPTIBLE DE VISUALIZAR UNA SEÑAL QUE INDICA TAL EXISTENCIA.
PROCEDIMIENTO DE VIDEO-MANDO A DISTANCIA DE MAQUINAS, EN PARTICULAR DE VEHICULOS, Y DISPOSITIVO PARA SU REALIZACION.
(16/02/2000). Solicitante/s: SOCIETE M5. Inventor/es: BAILLY, MICHEL.
ELDISPSITIVO DE VIDEOCONTROL DE LA INVENCION COMPRENDE UN PUESTO DE CONTROL ALEJADO Y UN PUESTO A BORDO DE LA MAQUINA A TELEDIRIGIR. ESTE ULTIMO COMPRENDE ESENCIALMENTE VARIAS CAMARAS , UN CONJUNTO DE MEZCLA EN TIEMPO REAL UN EMISOR DE VIDEO Y AUDIO Y UN RECEPTOR DE CONTROL REMOTO . EL PUESTO DE CONTROL COMPRENDE MONITORES (7A A 7F), UN RECEPTOR DE VIDEO-AUDIO Y UN EMISOR DE CONTROL REMOTO . APLICACION: CONTROL REMOTO DE MAQUINA DE OBRAS PUBLICAS.
PROCEDIMIENTO Y DISPOSITIVO DE COMANDO DEL TIMON DE DIRECCION DE UNA AERONAVE.
(16/12/1999). Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: GAUTIER, JEAN-PIERRE, ORTEGA, JEAN-MARC.
DISPOSITIVO DE CONTROL DEL TIMON DE DIRECCION DE UNA AERONAVE. EL DISPOSITIVO LLEVA AL MENOS DOS SERVOCONTROLES (110, 112, 114( QUE TIENEN CADA UNO AL MENOS UNA ENTRADA DE CONTROL ELECTRICO (111A, 113A, 115A). AL MENOS UNO DE LOS SERVOCONTROLES , LLAMADO SERVO CONTROL MIXTO, LLEVA ADEMAS UNA ENTRADA DE CONTROL MECANICO (115B), Y UN SISTEMA DE CONDUCCION ELECTRICO DE LOS SERVOCONTROLES ES APTO PARA OCUPAR UN ESTADO QUE CORRESPONDE A UNA AVERIA DE UN PROPULSOR EN EL QUE AL MENOS DOS DE LOS SERVOCONTROLES ACCIONAN SIMULTANEAMENTE EL TIMON , Y UN ESTADO QUE CORRESPONDE A UNA AVERIA ELECTRICA, EN EL QUE, EL SERVOCONTROL MIXTO , ACCIONA EL TIMON CONTROLADO A PARTIR DE LA ENTRADA DE CONTROL MECANICO.
DISPOSITIVO DE ASISTENCIA PARA LA DIRECCION.
(01/11/1999). Ver ilustración. Solicitante/s: PELLETIER, PATRICK. Inventor/es: PELLETIER, PATRICK.
LA INVENCION SE REFIERE AL CAMPO DE LAS DISPOSICIONES DE MEDIDA QUE DAN RESULTADOS DISTINTOS DEL VALOR INSTANTANEO DE UNA VARIABLE Y MAS CONCRETAMENTE A UN DISPOSITIVO DE ASISTENCIA AL CONTROL EN VUELO DE UNA AERONAVE QUE LLEVA MEDIOS DE MEDICION DEL VALOR INSTANTANEO DE VARIABLES FISICAS RELATIVAS PARTICULARMENTE A LOS MEDIOS DE PROPULSION Y A LAS CONDICIONES AMBIENTALES, CARACTERIZADO PORQUE LLEVA MEDIOS APTOS PARA VISUALIZAR, EN CUALQUIER PUNTO DEL CAMPO DE VUELO CON EMPLEO DE POTENCIA Y A PARTIR DE DICHOS VALORES MEDIDOS, UNA INFORMACION REPRESENTATIVA DEL DESVIO ENTRE LA POTENCIA CONSUMIDA POR LOS MEDIOS DE PROPULSION Y UNA POTENCIA MAXIMA PREDEFINIDA, LLEVANDO ESTOS MEDIOS UN PROCESADOR DE A BORDO EN EL QUE SE HA INTRODUCIDO LA MODELIZACION DE LA MECANICA DE VUELO Y DE LOS MOTORES EN TODO EL CAMPO DE VUELO DE LA AERONAVE, Y UNA PANTALLA DE VISUALIZACION.
PROCEDIMIENTO Y DISPOSICION DE CIRCUITO PARA EL CONTROL DE POTENCIA DE CARGAS ELECTRICAS SIN PRODUCIR GRANDES SOBRECARGAS.
(01/04/1999) PROCEDIMIENTO Y DISPOSICION DE CIRCUITO PARA EL CONTROL DE POTENCIA DE CARGAS ELECTRICAS SIN PRODUCIR GRANDES SOBRECARGAS. LAS CARGAS ELECTRICAS SE DIVIDEN AL MENOS EN DOS CARGAS PARCIALES, Y PARA CONSEGUIR LA POTENCIA INDIVIDUAL NECESARIA, ESTA SE DISTRIBUYE DE MANERA LO MAS UNIFORME POSIBLE SOBRE LAS CARGAS PARCIALES EN UN INTERVALO DE POTENCIA DETERMINADO. EN VIRTUD DEL PROCEDIMIENTO, A PARTIR DE TRES SEMIONDAS SE FORMAN TRES SECUENCIAS DE IMPULSOS PATRON A, B Y C SEPARADAS, QUE CORRESPONDEN A LAS SEMIONDAS SUCESIVAS DE LA RED, MIENTRAS QUE LAS SEMIONDAS NEGATIVAS SE RECTIFICAN. CADA SECUENCIA DE IMPULSOS PATRON, A, B, Y C, CONECTA DURANTE UN PERIODO ESPECIFICADO (PERIODO PWM) UNA CARGA PARCIAL…
SISTEMA PARA INHIBIR EL CONTROL DE LA COORDINACION DE VIRAJE PARA UN SISTEMA DE CONTROL DE AVION DE ALAS ROTATIVAS.
(16/11/1998). Solicitante/s: UNITED TECHNOLOGIES CORPORATION. Inventor/es: GOLD, PHILLIP, J., FOGLER, DONALD, L., JR., SKONIECZNY, JOSEPH, KELLER, JAMES, F.
UN SISTEMA INHIBIDOR DE LA COORDINACION DE CURVAS INHIBE UN SISTEMA DE CONTROL DE UN AVION CON ALAS GIRATORIAS DE SU UTILIZACION EN UN MODO DE COORDINACION DE CURVAS AUTOMATICO CUANDO UN PILOTO DESEA REALIZAR UNA MANIOBRA DE DESPLAZAMIENTO HACIA UN LADO, COMO POR EJEMPLO, UN CURVA PLANA. CUANDO LA COORDINACION DE CURVAS AUTOMATICA NO ESTA CONECTADA , POR EJEMPLO, EL AEROPLANO NO ESTA EN UN CURVA COORDINADA, Y O BIEN EL ANGULO DEL BANCO DEL AEROPLANO SUPERA UNA MAGNITUD LIMITE INHIBIDA O BIEN UN MANDO DE DESVIO DEL PILOTO PROVISTO POR UN CONTROLADOR DE BRAZO LATERAL DEL PILOTO EXCEDE UN VALOR LIMITE MINIMO , POR EJEMPLO, EL CONTROLADOR DE BRAZO LATERAL ES INCAPAZ DE FIJARSE EN EL EJE DE DESVIO, LA COORDINACION DE CURVAS AUTOMATICA ES INHIBIDA . LA COORDINACION DE CURVAS AUTOMATICA PERMANECE INHIBIDA HASTA QUE AMBOS EL ANGULO DEL BANCO DEL AEROPLANO CAE POR DEBAJO DE UNA MAGNITUD LIMITE PROGRAMADA Y EL CONTROLADOR DE BRAZO LATERAL VUELVE A SU POSICION DE DETENCION DEL EJE DE DESVIO.
MODULO DE NAVEGACION PARA UN VEHICULO SEMICONDUCTOR.
(16/04/1998). Solicitante/s: GENERAL ELECTRIC COMPANY. Inventor/es: DAUSCH, MARK, EDWARD, CAREY, BERNARD JOSEPH, BONISSONE, PIERO PATRONE.
UN MODULO DE NAVEGACION BASADO EN LOGICA BORROSA PARA SU USO EN UN VEHICULO SEMIAUTONOMO COMPUTA LA SEGURIDAD DE MOVIMIENTO DESDE REGIONES LOCALES PREDEFINIDAS A REGIONES LOCALES ADYACENTES PARA PROPOSITO DE PLANEAR UNA VIA SEGURA PARA EL VEHICULO PARA ALCANZAR SU DESTINO PENSADO. EL PROGRAMA DE COMPRENSION DE IMAGENES PROPORCIONA LA ENTRADA AL SISTEMA EN FORMA DE VALORES PARA VARIABLES LINGUISTICAS PARA CADA REGION LOCAL LAS CUALES IMPACTAN EL MOVIMIENTO SEGURO DEL VEHICULO. AL USAR UNA ESTRUCTURA DE BASE DE REGLA DE JERARQUIA DE CINCO NIVELES, EL PROCESO DE INFERENCIA DE BORROSO COMPUESTA VALORES DE SEGURIDAD INTERMEDIOS Y FINALES QUE ESTAN ASOCIADOS NO SOLAMENTE POR CONDICIONES LOCALES SINO TAMBIEN POR CONDICIONES CERCANAS CON EL FIN DE PERMITIR UN ESPACIO LIBRE MINIMO PARA EL VEHICULO.
SISTEMA DE CONTROL REMOTO PROGRAMABLE PARA UN VEHICULO.
(01/04/1998). Solicitante/s: ZELTRON S.P.A. Inventor/es: DRIUS, FRANCESCO, GIORDANO, ROBERTO.
SISTEMA DE CONTROL REMOTO PROGRAMABLE PARA UN VEHICULO EQUIPADO CON SUS PROPIOS MEDIOS DE PROPULSION Y DE DIRECCION QUE ESTAN ADAPTADOS PARA SER CONTROLADOS MEDIANTE MEDIOS DE CONTROL REMOTO , COMPRENDIENDO DICHO SISTEMA UNA CAMARA DE TELEVISION QUE TOMA LAS IMAGENES DE UN AREA OPERATIVA , EN LA CUAL DICHO VEHICULO ESTA SITUADO, Y LLEVA CON UNA SEÑAL DE VIDEO CORRESPONDIENTE UN ORDENADOR PERSONAL EN EL QUE UN PROGRAMA OPERATIVO PUEDE ESTABLECERSE DE ACUERDO CON CUAL DICHO ORDENADOR ES CAPAZ DE CONTROLAR A DISTANCIA EL MOVIMIENTO DE DICHO VEHICULO. EL ORDENADOR PERSONAL ES CAPAZ DE ALMACENAR EN EL PROGRAMA OPERATIVO UNA ZONA DE MOVIMIENTO , DENTRO DE LA CUAL DICHO VEHICULO ES CONTROLADO PARA MOVERSE. EL VEHICULO ESTA PROVISTO CON MEDIOS DE RECONOCIMIENTO OPTICOS CODIFICADOS QUE EL ORDENADOR PERSONAL DETECTA DE MODO A DETERMINAR SU POSICION INSTANTANEA DENTRO DE DICHA ZONA DE MOVIMIENTO Y CONDUCIR EL VEHICULO CON SEÑALES DE ERROR CORRESPONDIENTES, DE ACUERDO CON EL PROGRAMA OPERATIVO.
DISPOSICION PARA PROPORCIONAR COMUNICACIONES Y CONTROL POSICIONAL EN UNA INSTALACION DE GUIA.
(16/03/1998). Ver ilustración. Solicitante/s: TELIA AB. Inventor/es: WICHTEL, ERIK.
DISPOSICION PARA PROPORCIONAR COMUNICACIONES Y CONTROL POSICIONAL EN UNA INSTALACION DE GUIA PARA EL GUIADO DE UNIDADES MOVILES, QUE SE INSTALA EN SISTEMAS DE VIAS. EL CONTROL POSICIONAL SE REALIZA CON GRAN PRECISION. UNA UNIDAD MOVIL Y PUESTOS DE BASE COLOCADOS A LO LARGO DEL SISTEMA DE VIAS CONSTITUYEN EQUIPOS PRIMERO Y SEGUNDO PARA LAS COMUNICACIONES Y CONTROL POSICIONAL. EL ESTABLECIMIENTO DE LA COMUNICACION ENTRE LOS EQUIPOS PRIMERO Y SEGUNDO SE REALIZA A TRAVES DE UN SISTEMA DE RADIO MOVIL (DECT). SE ESTABLECE EL CONTROL POSICIONAL MEDIANTE UN EQUIPO DE CONTROL POSICIONAL INCLUIDO EN UNA RESPECTIVA UNIDAD MOVIL. CUANDO UNA UNIDAD MOVIL REBASA UN PUESTO DE BASE, SE ACTUALIZA EL EQUIPO DE CONTROL POSICIONAL DE LA UNIDAD MOVIL CON LA AYUDA DE UN EQUIPO DE CONTROL POSICIONAL DE REFERENCIA. ESTA ACTUALIZACION SE REALIZA A TRAVES DE DICHO SISTEMA DE RADIO MOVIL. ES DE APLICACION EN SISTEMAS DE VEHICULOS SIN CONDUCTOR.
PROCESO Y DISPOSITIVO PARA DETECTAR UN EXCESO DE CARGAS DE DIMENSIONAMIENTO DE UNA AERONAVE.
(16/01/1998). Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: DELEST, THIERRY, REGIS, OLIVIER, SCHUSTER, PATRICK.
LA INVENCION SE REFIERE A UN PROCESO PARA DETECTAR UN EXCESO DE LAS CARGAS DE DIMENSIONAMIENTO DE UNA AERONAVE DURANTE EL ATERRIZAJE. SEGUN LA INVENCION: - EN UNA ETAPA PRELIMINAR: . SE DEFINEN LOS CRITERIOS DE CARGA (C1, C2,...CP); Y . SE DETERMINAN LEYES DE EVOLUCION DE LOS VALORES ADMISIBLES (C1AD, C2AD, ... CPAD) DE ESTOS CRITERIOS DE CARGA (C1, C2..., CP) EN FUNCION DE PARAMETROS DE ENTRADA (P1, P2, ...PN): Y - EN EL MOMENTO DEL ATERRIZAJE: . SE MIDEN LOS VALORES DE DICHOS PARAMETROS DE ENTRADA (P1, P2, ...PN) Y DICHOS CRITERIOS DE CARGA (C1, C2,...CP). . SE CALCULAN LOS VALORES ADMISIBLES (C1AD, C2AD, ...CPAD) DE DICHOS CRITERIOS DE CARGA (C1, C2, CP); SE COMPARA, PARA CADA UNO DE DICHOS CRITERIOS DE CARGA (C1, C2, ...CP) EL VALOR EFECTIVO MEDIDO (C1M, C2M, CPM) CON EL VALOR ADMISIBLE CALCULADO (C1D, C2AD, CPAD); Y . SE DETERMINA SI UNA INSPECCION ESTRUCTURAL DEBE SER EFECTUADA.
HELICOPTERO, INCREMENTO DE LA VELOCIDAD DEL ROTOR DE CARGA ALTA.
(01/10/1996). Solicitante/s: UNITED TECHNOLOGIES CORPORATION. Inventor/es: WALSH, DAVID M., LAPPOS, NICHOLAS D., GREENBERG, CHARLES E., SWEET, DAVID H.
SE INCREMENTA LA REFERENCIA DE VELOCIDAD DE UN MOTOR DE HELICOPTERO EN RESPUESTA A UNA CARGA DE ROTOR PESADA . LA VELOCIDAD DE REFERENCIA APARECE GRADUALMENTE A UNA VELOCIDAD RELATIVAMENTE RAPIDA DEL 107% DE LA VELOCIDAD NOMINAL . DESPUES DE UN INTERVALO DE TIEMPO FIJO , LA CARGA REDUCIDA DEL ROTOR PROVOCARA QUE LA VELOCIDAD DE REFERENCIA SE DISMINUYA LENTAMENTE HACIA LA VELOCIDAD NOMINAL . SI LA TORSION EXCEDE EL 111% DE LA TORSION NOMINAL , LA VELOCIDAD DE REFERENCIA SE DISMINUYE DE MODO SIMILAR.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}