CIP-2021 : G01S 15/93 : como anti-colisión.
CIP-2021 › G › G01 › G01S › G01S 15/00 › G01S 15/93[2] › como anti-colisión.
Notas[n] desde G01S 13/00 hasta G01S 17/00: - Los grupos G01S 13/00 - G01S 17/00 cubren :
- los sistemas para detectar la presencia de un objeto, p. ej. por reflexión o por rerradiación desde el mismo objeto o desde un transpondedor asociado al objeto, para determinar la distancia o la velocidad relativa de un objeto, para proporcionar una representación coordenada de la distancia y de la dirección de un objeto o para obtener su imagen;
- los sistemas dispuestos para ser montados en una nave o vehículo móviles y que utilizan la reflexión de ondas en una superficie extensa externa a la nave, p. ej. sobre la superficie de la tierra, para determinar la velocidad y la dirección del movimiento de la nave con relación a la superficie.
- Los grupos G01S 13/00 - G01S 17/00 no cubren :
- los sistemas para determinar la dirección de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por los grupos G01S 1/00 o G01S 3/00;
- los sistemas para determinar la distancia o la velocidad de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por el grupo G01S 11/00 .
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar.
G01S 15/93 · · como anti-colisión.
CIP2021: Invenciones publicadas en esta sección.
Procedimiento para la sincronización de sensores en un bus de datos.
(09/10/2019). Solicitante/s: VALEO SCHALTER UND SENSOREN GMBH. Inventor/es: HALLEK, MICHAEL.
Procedimiento para la sincronización de sensores con un cronómetro independiente, en particular para sistemas de detección del entorno basados en ultrasonidos en un vehículo , en el que los sensores comunican con una unidad de mando a través de un bus con un protocolo de bus, que comprende al menos una ventana (SINC) de una duración en el tiempo (T) predeterminada, igualándose el ritmo del cronómetro en el sensor al ritmo de un cronómetro central en la unidad de mando y calculándose a partir del proceso de igualar un factor de corrección para los datos del sensor y midiéndose la duración en el tiempo (T) de la ventana (SINC) del cronómetro del sensor y transmitiéndose el tiempo medido a la unidad de mando , caracterizado por que el tiempo medido se usa para la corrección del cronómetro del sensor y de los datos enviados por el mismo.
PDF original: ES-2750203_T3.pdf
Dispositivo para un vehículo.
(11/09/2019) Procedimiento para medir un posible espacio de estacionamiento (P) mediante un vehículo que pasa al espacio de estacionamiento (P), donde
mediante un dispositivo de detección en el vehículo se detecta la longitud del espacio de estacionamiento (LP), durante un tiempo de activación (T1) con un sensor de distancia , las señales de medición (M) se transmiten y las señales de medición (M) reflejadas por los objetos son detectadas por el sensor de distancia dentro de un tiempo de recepción de la medición (T2), dicho tiempo de recepción de la medición (T2) se cambia para medir la longitud del espacio de estacionamiento (LP),
caracterizado porque el tiempo de recepción de la medición (T2) aumenta o se establece en un valor máximo al detectar un comienzo de espacio…
Sistema optoeléctrico de protección mejorada de la estación de control del operador.
(10/07/2019) Un sistema para proteger a un operador en una plataforma de trabajo aéreo de un peligro de aplastamiento, la plataforma de trabajo aéreo incluye una estructura de piso, un riel de seguridad junto con la estructura de piso y definir un área de trabajo de personal y un área de panel de control, el sistema comprende un sensor posicionable adyacente al área de panel de control, el sensor incluye una primera unidad transmisora colocada en uno lado del área de panel de control y una primera unidad receptora colocada en un lado opuesto del área de panel de control, la primera unidad transmisora emite un haz de luz a través del área de panel de control a la primera unidad receptora, el sistema comprende además un sistema de control que se comunica…
Disposición para el control de sensores de ultrasonido.
(20/02/2019). Solicitante/s: VALEO SCHALTER UND SENSOREN GMBH. Inventor/es: GOTZIG, HEINRICH, DR., BAUER, JURGEN, LILL, ANTON.
Disposición para el control de sensores de ultrasonido , en particular para sistemas de detección de entorno basados en ultrasonido en un vehículo, con al menos una unidad de interfaz entre el al menos un sensor de ultrasonido y un aparato de control ya previsto para otras tareas de control en el vehículo, controlando la unidad de interfaz de manera autónoma todos los modos de emisión, recepción y programación críticos en tiempo de todos los sensores de ultrasonido y poniendo a disposición las señales determinadas a través de líneas de comunicación correspondientes al aparato de control , caracterizada por que la unidad de interfaz está configurada como ASIC y está integrada en el aparato de control.
PDF original: ES-2718246_T3.pdf
Sistema SONAR para un vehículo autónomo.
(05/12/2018). Solicitante/s: IROBOT CORPORATION. Inventor/es: WETHERN,THOMAS JAMES.
Un sistema SONAR para su uso con un vehículo remoto , comprendiendo el sistema SONAR:
al menos un emisor SONAR que presenta una guía de ondas adaptada para guiar un sonido emitido desde el emisor hacia un entorno del vehículo remoto; y
al menos dos receptores SONAR , donde cada receptor SONAR presenta una guía de ondas adaptada para recibir sonido reflejado desde un entorno del vehículo remoto,
donde cada guía de ondas del emisor y los receptores comprenden paredes laterales , una pared superior y una pared inferior ,
caracterizado por que una o más guías de ondas del sistema SONAR están abocinadas y presentan un mayor abocinamiento en sus paredes laterales que en su pared superior y su pared inferior.
PDF original: ES-2692888_T3.pdf
Componente de revestimiento para un vehículo y procedimiento para la fijación y orientación de un soporte de sensor en un componente de revestimiento.
(03/12/2018). Solicitante/s: SMP Deutschland GmbH. Inventor/es: BLEILE,CLAUS.
Componente de revestimiento para un vehículo que comprende
- uno o varios orificios de paso ,
- uno o varios soportes de sensor para la recepción de un sensor ,
- disponiéndose los orificios de paso en la zona de una curvatura del componente de revestimiento, caracterizado por que
- el(los) soporte(s) se dispone(n) en la zona de uno de los orificios de paso separado(s) al menos parcialmente del componente de revestimiento formando un espacio libre , y por que
- el componente de revestimiento comprende además un elemento de relleno y fijación para rellenar el espacio libre en la zona de la curvatura entre el componente de revestimiento y el soporte de sensor , para orientar el soporte de sensor con respecto al componente de revestimiento , así como para fijar el soporte de sensor en el componente de revestimiento.
PDF original: ES-2692392_T3.pdf
Procedimiento de construcción de un mapa de probabilidad entre la ausencia y la presencia de obstáculos para un robot autónomo.
(25/04/2018) Un procedimiento para determinar, mediante un ordenador de a bordo de un robot autónomo, un mapa de píxeles de la probabilidad de al menos una entre la ausencia y la presencia de un obstáculo en el entorno del robot, estando dicho procedimiento caracterizado porque comprende:
- la inicialización, en una memoria de a bordo del robot, de una pluralidad de mapas iniciales definidos alrededor del robot y sustancialmente fijados a dicho robot, presentando dicho mapa unos límites predefinidos y estando pavimentados por unos píxeles de una dimensión predefinida, donde un valor de una probabilidad de al menos una entre la ausencia y la presencia de un obstáculo en cada píxel se establece en un valor predefinido;
- la adquisición, por una pluralidad de procedimientos de detección complementarios, datos representativos de al menos una entre…
Soporte de sensor para un sensor de distancia.
(07/09/2016). Solicitante/s: WABCO GMBH. Inventor/es: STENDER, AXEL, RISSE,RAINER, Ronnenberg,Udo, KAUFMANN,MICHAEL, STEPHAN,ARNE.
Soporte de sensor para un sensor de distancia , en el que el soporte de sensor presenta al menos:
una pieza de fijación para la colocación en un vehículo ,
una pieza de alojamiento colocada regulable en la pieza de fijación para la recepción del sensor de distancia ,
en el que la pieza de alojamiento es regulable en la pieza de fijación en al menos dos posiciones angulares diferentes, caracterizado por que
- la pieza de fijación es una carcasa , y
- la pieza de alojamiento es una tapa que cierra la carcasa , en el que el sensor de distancia está fijado en la tapa y está rodeado por la carcasa ,
en el que la tapa está girada en las dos posiciones angulares alrededor de 180º entre sí.
PDF original: ES-2604487_T3.pdf
Procedimiento para el manejo de una carretilla de manutención autónoma.
(27/04/2016). Solicitante/s: KUKA Laboratories GmbH. Inventor/es: PFAFF,PATRICK, SPRUNK,CHRISTOPH.
Procedimiento para el manejo de una carretilla de manutención autónoma, que presenta los siguientes pasos de procedimiento:
- determinar mediante un dispositivo de medición de una carretilla de manutención autónoma si debido al movimiento actual de la carretilla de manutención , ésta choca potencialmente con al menos un obstáculo ,
- determinar aquellos lugares de la carretilla de manutención con los que choca potencialmente el obstáculo ,
- determinar la correspondiente distancia (d) dependiente del movimiento entre el obstáculo y el lugar de la carretilla de manutención y
- calcular una velocidad máxima para el movimiento actual de la carretilla de manutención a base de la distancia (d) determinada, de manera que debido a un posible frenado de la carretilla de manutención , ésta se detiene de manera fiable delante del obstáculo.
PDF original: ES-2584378_T3.pdf
Sistema de asistencia a la conducción y procedimiento para su funcionamiento.
(13/04/2016) Sistema de asistencia a la conducción para detectar el entorno de un vehículo con por lo menos dos sensores para la emisión de señales no unidas a línea y para detectar las señales de eco reflejadas, con por lo menos una unidad de evaluación para determinar un tiempo de propagación de una señal y con una unidad de salida/visualización para la transmisión del resultado de la detección del entorno al conductor, caracterizado porque todos los sensores son de la misma construcción entre sí, que cada uno de los sensores presenta una unidad de evaluación para la determinación de un tiempo de propagación de la señal y que los sensores están conectados entre sí y con la unidad de salida/visualización mediante un sistema de bus , en el que los resultados de detección determinados individualmente de los sensores se transmiten…
(16/09/2015) Sensor ultrasónico con una carcasa con una pared lateral circunferencial y una superficie base , en donde se encuentra colocado un elemento convertidor para generar oscilaciones ultrasónicas, donde la pared lateral presenta:
- una sección inferior lateral , contigua a la superficie base , en donde la pared lateral presenta un perfil esencialmente asimétrico en un plano paralelo con respecto a la superficie base ;
- una sección superior de la pared lateral posicionada de forma contigua a la sección inferior de la pared lateral , en donde la pared lateral se prolonga hacia una borde superior de la pared lateral en un perfil esencialmente con simetría rotacional, referido a un plano paralelo con respecto a la superficie base ; caracterizado porque
la sección superior de la pared lateral que se une a…
Procedimiento de detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo de motor y vehículo de motor.
(27/08/2014) Procedimiento para la detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo de motor con velocidades a partir de 50 km/h, comprendiendo la disposición de medición con ultrasonido, que comprende al menos un sensor ( 3a, 3b, 3c, 3d) de ultrasonido, como datos de partida al menos el radio, que describe la separación del objeto más próximo situado en el campo de medición de un sensor (3a, 3b, 3c, 3d) utilizado para la medición del radio, caracterizado porque se determina una perturbación del proceso de medición en función de al menos una comparación del radio con un radio mínimo dependiente de la velocidad, aumentando…
Sistema acústico y con soporte táctil de información a los ocupantes del vehículo.
(20/08/2014) Sistema acústico de información a los ocupantes del vehículo para la supervisión de un entorno exterior del vehículo, en particular para vehículos blindados , mediante los sensores disponibles en el vehículo correspondiente, en el que los datos grabados por los sensores se le comunican acústicamente al conductor y/o comandante del vehículo correspondiente, simulándose el ruido natural correspondientes antes de que ocurra realmente un evento, caracterizado porque el ruido simulado se genera por un simulador de ruido en un rango de frecuencia inferior respecto al ruido natural correspondiente.
Procedimiento para la medición de la distancia por medio de ultrasonido.
(12/09/2012) Procedimiento para medición de la distancia por medio de ultrasonido, en el que se evalúa el tiempo de propagación (T1, Ta) de impulsos de emisión de ultrasonido hacia el obstáculo y de retorno, con al menos un emisor/receptor de ultrasonido , que se puede activar por al menos un oscilador con impulsos de emisión de diferente longitud del impulso de emisión (Ts), y en el que después del tiempo de propagación (T1, Ta) de impulsos de emisión de ultrasonido hacia un obstáculo y de retorno, se recibe el primer eco reflejado por el obstáculo , caracterizado porque como consecuencia de los impulsos de emisión de la longitud del impulso de emisión (Ts), se recibe…
Sensor de distancia y método para deteminar una distancia.
(30/03/2012) Sensor de distancia con un emisor y un receptor de ultrasonidos para la emisión de pulsos de ultrasonido y para la recepción de pulsos de ultrasonido reflejados por un objeto, una unidad discriminadora que está diseñada para determinar un punto focal (t5) del pulso de ultrasonido reflejado recibido, en base a un exceso de un primer valor umbral, y en base a un exceso consecutivo de un segundo valor umbral del pulso de ultrasonido reflejado recibido, y un dispositivo de evaluación de duración de trayectoria que está diseñado para determinar la distancia en relación con el objeto, en base al punto focal determinado (t5), caracterizado por un dispositivo de cálculo para calcular la altura del…
SISTEMA DE RECONOCIMIENTO DE OBSTACULOS EN UN VEHICULO AUTOMOVIL.
(01/06/2006). Ver ilustración. Solicitante/s: BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT. Inventor/es: WAGNER, ARMIN, HORST, WALTER.
EN UN SISTEMA DE PERCEPCION DE OBSTACULOS EN UN AUTOMOVIL CON UN MODULO ELECTRONICO DE CONTROL Y CON SENSORES PARA EL REGISTRO DE LA DISTANCIA DE UN OBSTACULO EN UNA ZONA PREDETERMINADA, EL MODULO DE CONTROL DETERMINA EN UNA ZONA PARCIAL DEFINIDA DE UNA PIEZA MONTADA POSTERIORMENTE EN EL VEHICULO, QUE PUDIERA SER RECONOCIDO COMO OBSTACULO POR EL SENSOR, EN CASO DE UNA PERCEPCION DE OBSTACULO REAL EN ESTA ZONA PARCIAL, EN UN PRIMER PASO LA DISTANCIA DEL OBSTACULO. EN UN SEGUNDO PASO, EL EQUIPO DE CONTROL REVISA, SI ESTA DISTANCIA ES VARIABLE. LA ALARMA, QUE SE DISPARA NORMALMENTE EN DEPENDENCIA DE LA DISTANCIA DEL OBSTACULO, SE OPRIME, CUANDO LA DISTANCIA DEL OBSTACULO PERCIBIDO EN LA ZONA PARCIAL DEFINIDA NO CAMBIE.
DISPOSITIVO DE DETECCION DE LA DISTANCIA.
(01/05/2006) Dispositivo de detección de la distancia para la detección de la distancia de objetos (O) con la ayuda de señales de ondas, que son emitidas desde el dispositivo de detección de la distancia y son reflejadas por los objetos (O), con: una instalación de emisión / recepción (S1S4) para la emisión y recepción de las señales de ondas con al menos una primera y una segunda unidad de emisión y/o unidad de recepción, que están distanciadas entre sí en el espacio, la primera de las cuales presenta al menos una función de emisión y la segunda presenta al menos una función de recepción; en el que las dos unidades están configuradas…
Procedimiento y dispositivo para captar objetos, especialmente como dispositivo de asistencia y ayuda de aparcamiento en un vehículo automóvil.
(16/11/2002). Solicitante/s: VOLKSWAGEN AKTIENGESELLSCHAFT. Inventor/es: BAHR, ULRICH, DR., LISSEL, ERNST, SCHOFT, AXEL, BITTGENBACH, STEPHANUS.
Dispositivo para captar objetos, especialmente como dispositivo de asistencia y ayuda de aparcamiento en un vehículo automóvil, que comprende una pluralidad de sensores de distancia, al menos un microcontrolador que controla los sensores de distancia y una unidad de salida, caracterizado porque los sensores de distancia pueden ser solicitados con un indicativo variable en el tiempo por medio del microcontrolador.
SISTEMA Y DISPOSITIVO PARA UN DISPOSITIVO DE ORIENTACION AUTOMATICA.
(01/03/2002) LA INVENCION REVELA UN SISTEMA DETECTOR DE PROXIMIDAD Y UN APARATO AUTONOMO, COMO UNA ASPIRADORA, QUE SE ESTABLECE CON UN PAR DE RUEDAS CONDUCIDAS INDEPENDIENTES . EL APARATO CONTIENE PARA EL GUIADO Y LA ORIENTACION DE PROXIMIDAD UN SISTEMA DE MICROPROCESADOR Y UN SISTEMA DE SONAR QUE COMPRENDE AL MENOS UN TRANSMISOR DE ULTRASONIDOS Y UN RECEPTOR DE ULTRASONIDOS. TAMBIEN SE UTILIZA UN SENSOR TACTIL MECANICO ADICIONAL EN FORMA DE PARAGOLPES QUE SOBRESALE HACIA ADELANTE QUE LLEVA EL TRANSMISOR Y MICROFONOS RECEPTORES. EL PARAGOLPES MECANICO ACCIONA AL MENOS UN SENSOR TACTIL SI EL APARATO ENTRA EN CONTACTO…
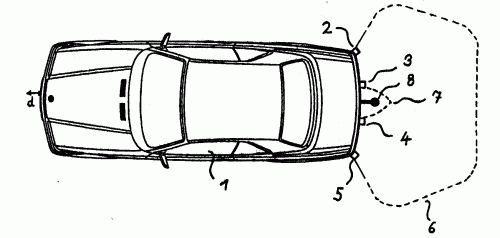
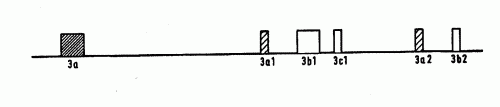
SISTEMA DE MEDICION DE DISTANCIAS POR ULTRASONIDO CON SEÑALES DIGITALES DE MEDICION TRANSMITIDAS POR MULTIPLEXION DE TIEMPO.
(16/01/2002). Ver ilustración. Solicitante/s: ITT MANUFACTURING ENTERPRISES, INC.. Inventor/es: HOFFSOMMER, KLAUS.
LA INVENCION SE REFIERE A UN SISTEMA DE MEDICION DE DISTANCIAS, ESPECIALMENTE UN SISTEMA PARA ESTACIONAMIENTO ASISTIDO DE AUTOMOVILES, POR EL QUE LA INFORMACION (1A, 1B, 1C Y 2A, 2B) QUE DEBE TRANSMITIRSE AL SISTEMA UNICO DE CONTROL POR PARTE DE LOS SENSORES SE COMPRIME EN EL TIEMPO. ESTO HACE POSIBLE INTERPRETAR VARIAS VECES EL IMPULSO DEL MISMO ECO O TRANSMITIR INFORMACION CON MAYOR SEGURIDAD POR MEDIO DE CODIFICACION DIFERENTE DE LA MISMA INFORMACION EN LA LINEA DE DATOS. EXISTE TAMBIEN LA POSIBILIDAD DE CONECTAR UNA SERIE DE DIVERSOS SENSORES A LA MISMA LINEA DE DATOS, DE MANERA QUE NO SE NECESITE YA UNA CONEXION EN FORMA DE TRIANGULO DE LOS SENSORES AL DISPOSITIVO DE CONTROL, POR MEDIO DE UN NUMERO CORRESPONDIENTE DE LINEAS DE DATOS.
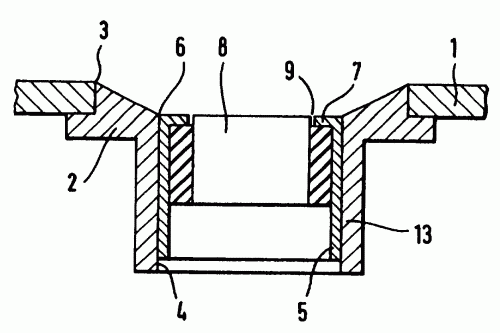
PARACHOQUES QUE SE PUEDE RECUBRIR CON PINTURA CON TRANSDUCTOR DE ULTRASONIDOS.
(16/10/2001). Ver ilustración. Solicitante/s: ITT AUTOMOTIVE EUROPE GMBH. Inventor/es: MULLER, HARRY, MATHES, JOACHIM.
LA INVENCION SE REFIERE A UN PARACHOQUES, QUE MUESTRA UNOS SUJETADORES ADECUADOS PARA SOPORTAR TRANSDUCTORES DE ULTRASONIDOS . LA MISION DE LA INVENCION CONSISTE EN MEJORAR LA CAPACIDAD DE BARNIZADO DE UN FIJADOR DE ESTE TIPO MEDIANTE LA EVITACION DE JUNTURAS . LA INVENCION CONSISTE FUNDAMENTALMENTE EN DOTAR EL FIJADOR DE UN PANEL FUNDIDO , A TRAVES DEL CUAL SE CUBREN LAS JUNTURAS EN EL TRANSDUCTOR , Y/O DIVIDIR EL FIJADOR EN DOS PIEZAS DE FIJADOR , ESTANDO FUNDIDA LA PRIMERA PIEZA DE SUJETADOR EN EL PARACHOQUES.
METODO Y DISPOSITIVO PARA DETECTAR OBSTACULOS PARA UN DISPOSITIVO AUTONOMO.
(01/08/2001) LA PRESENTE INVENCION PROPORCIONA UN METODO Y UN SISTEMA PARA LA ORIENTACION DE CAMPO APROXIMADA DE UN DISPOSITIVO AUTONOMO Y UTILIZA UNA ONDA TRANSMITIDA QUE TIENE UNA PRIMERA FRECUENCIA DE PROPAGACION LENTA, CON LA QUE SE DETECTAN LOS REFLEJOS DE LOS OBSTACULOS EN UNA ZONA PROXIMA. DE ACUERDO CON LA PRESENTE INVENCION LOS MEDIOS DE RECEPCION ESTAN DISPUESTOS EN UN PLANO INCLINADO, O PREFERENTEMENTE A LO LARGO DE UNA LINEA DE BASE CURVA PARA OBTENER DE FORMA SIMPLE UNA DIRECCION TRIDIMENSIONAL A UN OBSTACULO QUE REFLEJA LA FRECUENCIA DE PROPAGACION LENTA. ADICIONALMENTE SE SITUA POR ENCIMA DE AL MENOS UN SISTEMA RECEPTOR UN ABSORBENTE O UNA PANTALLA, O UNA COMBINACION DE LOS MISMOS DE MODO QUE ESTE ACTUEN COMO UNA "CEJA" PARA ATENUAR LOS REFLEJOS NO DESEADOS RECIBIDOS…
PROCEDIMIENTO PARA MEDIR, DESDE UN VEHICULO, LAS DISTANCIAS, EN FUNCION DE DATOS DEL MISMO VEHICULO.
(16/02/2001). Ver ilustración. Solicitante/s: ITT MANUFACTURING ENTERPRISES, INC.. Inventor/es: MATHES, JOACHIM, LILL, ANTON, KIEMES, JOCHEN.
LA INVENCION SE REFIERE A UN SISTEMA DE AYUDA AL ESTACIONAMIENTO POR MEDIO DE ULTRASONIDOS. LOS SISTEMAS DE ESTE TIPO EMITEN SEÑALES DE ADVERTENCIA CUANDO UNA SEÑAL DE ECO SITUADA DENTRO DE UNA VENTANA DE AUDIBILIDAD SUPERA UN DETERMINADO VALOR DE UMBRAL. HASTA AHORA, LA VENTANA DE AUDIBILIDAD O LA SENSIBILIDAD DEL SISTEMA SE ADAPTABA UNA VEZ A DATOS FIJOS DEL VEHICULO Y/O DEL REMOLQUE. SEGUN LA INVENCION, LA SENSIBILIDAD, LA VENTANA DE AUDIBILIDAD O INCLUSO LA RESPUESTA DE EMISION, SE ADAPTA EN FUNCION DE DIVERSOS DATOS DINAMICOS DEL VEHICULO O REMOLQUE.
PROCEDIMIENTO PARA LA DETECCION DE OBSTACULOS MEDIANTE ULTRASONIDOS.
(01/10/1999) PARA DETECTAR OBSTACULOS ES CONOCIDA LA EMISION DE IMPULSOS DE ULTRASONIDOS PERIODICAMENTE Y LA DEDUCCION DE LA POSICION DE LOS OBSTACULOS A PARTIR DEL ECO RECIBIDO EN TIEMPO O DE LOS ECOS DE ULTRASONIDOS REFLEJADOS. LA INVENCION SE REFIERE A UN PROCESO DONDE, DESPUES DE QUE CADA IMPULSO DE ULTRASONIDOS ES EMITIDO, SE MIDEN LOS ECOGRAMAS Y SON REGISTRADOS DE FORMA QUE A PARTIR DE ELLO SE EVALUAN LOS ECOGRAMAS OBTENIDOS POR MEDIO DE ASESORAMIENTO DE ENVUELTA DE AMPLITUDES CURVAS. LOS ECOGRAMAS DE EVALUACION SON ENTONCES UTILIZADOS PARA LA DETECCION DE OBSTACULOS. DURANTE EL PROCESO DE EVALUACION, LOS ECOS QUE PERMANECEN CORRELACIONADOS CRONOLOGICAMENTE CON LOS IMPULSOS DEL EMISOR PARA UNA PLURALIDAD DE CICLOS DE MEDICION SON AMPLIFICADOS MIENTRAS QUE LOS ECOS NO CORRELACIONADOS SON SUPRIMIDOS. COMO RESULTADO…
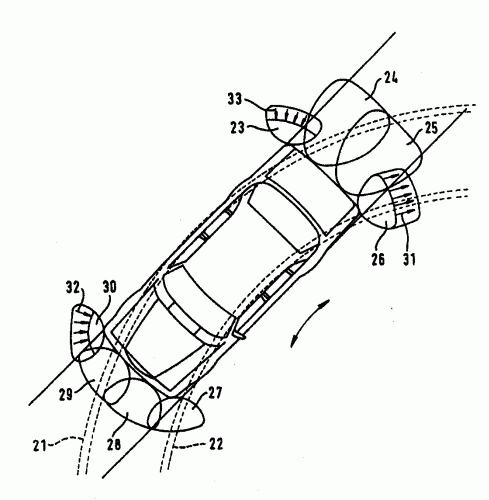
PROCEDIMIENTO PARA LA LOCALIZACION DE UN OBSTACULO.
(16/08/1993) CON UN PROCEDIMIENTO PARA LACALIZAR UN OBSTACULO CON RESPECTO A UN SISTEMA DE COORDINACION MOVIDO SIMULTANEAMENTE CON UN VEHICULO SIN OPERADOR MOVIL Y DIRIGIBLE, POR MEDIO DE ONDAS ULTRASONICAS REFLECTANTES, RECIBIDOS DE RECEPTORES CON EXISTENCIA DE OBSTACULOS, QUE ESTAN RADIADOS DESDE EMISORES HACIA LA DIRECCION DE LA MARCHA, CON LO CUAL, CORRESPONDIENTE A LA INFORMACION RECIBIDA, SE TRANSMITE SEÑALES DE FRENADO Y/O DE DIRECCION AL VEHICULO PARA LA EVITACION DE UNA COLISION, SE REMITE, PARA EL FIN DE UNA DETERMINACION EXACTA DE UN OBSTACULO SEGURO DE PARASITOS CON RESPECTO A UN SISTEMA DE COORDINACION MOVIDO CON UN VEHICULO SIN OPERADOR, MOVIL Y DIRIGIBLE, UN IMPULSO AISLADO SIEMPRE DE DOS ONDAS ULTRASONICAS ADYACENTES Y SE RECIBEN, EL CUAL TAMBIEN EN LAS FUENTES EMISORAS Y SE POSIBILITAN CON EL AVANCE DE UNA FUENTE DE SONIDO, ADICIONAL DESPUES…
{kind=link}
{kind=link}
{kind=link}
{kind=link}