Sensor de distancia y método para deteminar una distancia.
Sensor de distancia con un emisor y un receptor de ultrasonidos (21,
22) para la emisión de pulsos de ultrasonido (13) y para la recepción de pulsos de ultrasonido reflejados por un objeto, una unidad discriminadora (23) que está diseñada para determinar un punto focal (t5) del pulso de ultrasonido reflejado recibido, en base a un exceso de un primer valor umbral, y en base a un exceso consecutivo de un segundo valor umbral del pulso de ultrasonido reflejado recibido, y un dispositivo de evaluación de duración de trayectoria (24) que está diseñado para determinar la distancia en relación con el objeto, en base al punto focal determinado (t5), caracterizado por un dispositivo de cálculo (27) para calcular la altura del objeto (12) en base a una amplitud de pulso (tb) del pulso de ultrasonido reflejado, la relación de la cantidad de pulsos de ultrasonidos reflejados con la cantidad de pulsos de ultrasonidos emitidos, y/o una distribución de los puntos focales de los pulsos de ultrasonidos reflejados de un objeto, y una unidad de corrección (28) diseñada para corregir la distancia determinada por el dispositivo de evaluación de la duración de trayectoria, en relación con la altura calculada.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/058028.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: NIEMZ,Volker.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S15/10 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › que utilizan la transmisión de ondas discontinuas moduladas por pulsos (determinación de la distancia mediante mediciones de fase G01S 15/32).
- G01S15/93 G01S 15/00 […] › como anti-colisión.
- G01S7/527 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Extracción de las señales de eco deseadas.
PDF original: ES-2377763_T3.pdf
Fragmento de la descripción:
Sensor de distancia y método para determinar una distancia Estado del arte La presente invención hace referencia a un sensor de distancia y a un método para determinar una distancia, particularmente un vehículo a motor con el sensor de distancia, y un método para un sistema de asistencia de aparcamiento que se basa en el método para determinar una distancia.
Un sistema de asistencia de aparcamiento convencional determina una distancia de un vehículo a motor en relación con objetos de su entorno. Las distancias determinadas se indican al conductor del vehículo a motor de forma acústica y mediante una visualización. Un sistema de asistencia de aparcamiento de esta clase se conoce, por ejemplo, de la patente DE 43 35 728 A1.
Un procedimiento para determinar una distancia utiliza un método de eco de pulsos (mediciones de tiempo de propagación) de pulsos de ultrasonidos. En este caso, se determina la distancia entre el vehículo a motor y un objeto como producto de la velocidad del sonido en el aire y de un periodo de tiempo entre una emisión de un pulso de ultrasonido y la recepción de fracciones reflejadas del pulso de ultrasonido. El periodo de tiempo se determina mediante un temporizador que se inicia mediante la emisión del pulso de ultrasonido, y que se detiene en el momento en el que un receptor recibe una señal de ultrasonido que excede un nivel de señal predeterminado.
De la patente GB 2 207 757 A se conoce un dispositivo para la medición de distancias que comprende medios para emitir una señal acústica a un sitio alejado con el fin de medir su distancia, y medios para recibir nuevamente la energía acústica reflejada, y un circuito de conmutación para eliminar los ecos de interferencia, en tanto que se proporciona un nivel de señal como valor umbral por encima del nivel de señal de los ecos mencionados de interfencia, y se proporciona un circuito de conmutación sincronizado para sincronizar el intervalo entre la transmisión y la recepción de la señal acústica. Además, de la patente EP 1562 050 A se conoce un método y un dispositivo para la adaptación de un valor umbral de un dispositivo de detección con una pluralidad de etapas. Por otra parte, de la patente US 2005/110620 A1 se conocen un par de sensores de medición de distancia que se encuentran a diferentes alturas y miden la distancia en relación con un obstáculo.
Revelación de la presente invención Conforme a la presente invención, de acuerdo con la reivindicación 1, un sensor de distancia está provisto de un emisor y un receptor de ultrasonidos para la emisión de pulsos de ultrasonidos y para la recepción de pulsos de ultrasonidos reflejados por un objeto, y está provisto de una unidad discriminadora que está diseñada para determinar un punto focal del pulso de ultrasonido reflejado recibido, en base a un exceso de un primer valor umbral y a un exceso consecutivo de un segundo valor umbral del pulso de ultrasonido reflejado recibido, y presenta un dispositivo de evaluación de duración de trayectoria que está diseñado para determinar la distancia en relación con el objeto, en base al punto focal determinado.
Además, se proporciona un método para determinar una distancia en relación con un objeto mediante una medición del tiempo de propagación de un pulso de ultrasonido reflejado, en donde la finalización de la medición del tiempo de propagación se establece mediante un punto focal del pulso de ultrasonidos reflejado.
Un aspecto de la presente invención consiste en consultar el punto focal del pulso de ultrasonido reflejado para la determinación del tiempo de propagación de un pulso de ultrasonido. Se ha comprobado que una medición del tiempo de propagación de esta clase realizada no depende de influencias ambientales, como por ejemplo, la temperatura ambiente, la humedad atmosférica, la presión atmosférica y el viento.
Breve descripción de los dibujos A continuación, se explica la presente invención de acuerdo con las formas de ejecución preferidas y las figuras incluidas. En las figuras se muestra:
Fig. 1 ejemplo de una evolución en el tiempo de una intensidad de señal detectada por un receptor de ultrasonido;
Fig. 2 ejemplo de una evolución en el tiempo de una intensidad de señal detectada por un receptor de ultrasonido para la ilustración de una forma de ejecución;
Fig. 3a ilustración de una señal de ruido para explicar un acondicionamiento;
Fig. 3b ilustración de otro acondicionamiento en relación con una señal de ruido;
Fig. 4 consideraciones geométricas en relación con otra forma de ejecución;
Fig. 5 consideraciones geométricas en relación con otra forma de ejecución;
Fig. 6 representación de la función de una amplitud de pulso tb en relación con la altura del objeto;
Fig. 7 representación de la función dinámica de una amplitud de pulso tb en relación con la altura del objeto;
Fig. 8 registro de pulsos de ultrasonidos recibidos de diferentes objetos;
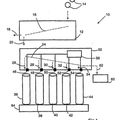
Fig. 9 función de una probabilidad de reflexiones múltiples en una hilera de vehículos a motor, dependiendo de la distancia en relación con la hilera de vehículos a motor;
Fig. 10 función de una probabilidad de reflexiones múltiples en un seto, dependiendo de la distancia en relación con el seto;
Fig. 11 distribución estadística de las distancias determinadas en relación con la altura del objeto, y Fig. 12 representación en bloques de un sensor de distancia.
Formas de ejecución de la presente invención Un modo de operación de un método para determinar una distancia en relación con un objeto, se explica a modo de ejemplo mediante la figura 1, que representa señales 1 convencionales, o bien esquemáticas, de un receptor de ultrasonidos de un sensor de distancia.
Un emisor de ultrasonidos emite un pulso de ultrasonido entre los puntos de tiempos t0 y t1. Convenientemente, el receptor de ultrasonido se desactiva durante la emisión. Después el receptor de ultrasonido recibe el pulso de ultrasonido que se genera mediante las reflexiones en objetos del pulso de ultrasonido emitido.
El receptor de ultrasonidos recibe en parte las fracciones aún reflejadas de los pulsos de ultrasonidos que se han emitido antes del último pulso de ultrasonido emitido. Dichas fracciones reflejadas presentan, generalmente, una intensidad reducida I y se suprimen con la ayuda de una curva del valor umbral 2 apropiada seleccionada. La curva del valor umbral 2, como se representa en la fig. 1, puede consistir en una función hiperbólica. Otra curva del valor umbral 2 apropiada, presenta un valor umbral que decrece con un incremento de duración después de la emisión de un pulso de ultrasonido.
Un temporizador detecta el periodo de tiempo tL entre el punto en el tiempo t0 de la emisión del pulso de ultrasonido, y el punto en el tiempo t2 en el que la intensidad de un pulso de ultrasonido reflejado excede el valor umbral 4 de la curva del valor umbral 2. El periodo de tiempo tL corresponde, aproximadamente, al doble del tiempo de propagación entre el emisor y el receptor de ultrasonidos. Sin embargo, el tiempo de propagación determinado depende de la selección de la curva del valor umbral 2, como se muestra mediante la curva del valor umbral 3 representada para su comparación. En la selección de una curva del valor umbral 2 con valores umbrales comparativamente elevados, se determina un tiempo de propagación más prolongado. De la misma manera, se determina un tiempo de propagación más prolongado cuando se produce una atenuación elevada de los pulsos de ultrasonido mediante el entorno. La atenuación de los pulsos de ultrasonidos se ve afectada, entre otros factores, mediante la humedad atmosférica, la temperatura ambiente, la presión atmosférica y las condiciones del viento.
En una primera forma de ejecución de un método se determina una amplitud de pulso tb de un pulso reflejado con una intensidad de señal I1 predeterminada (fig. 2) . La amplitud de pulso tb corresponde al periodo de tiempo entre el punto en el tiempo t3 cuando se excede por primera vez un primer valor umbral, en correspondencia con la intensidad de señal I1 predeterminada, y un punto en el tiempo t4 consecutivo en el que se excede por primera vez un segundo valor umbral que en el presente ejemplo de ejecución se selecciona también igual a la intensidad de señal predeterminada I1.
Para determinar un tiempo de propagación... [Seguir leyendo]
Reivindicaciones:
1. Sensor de distancia con un emisor y un receptor de ultrasonidos (21, 22) para la emisión de pulsos de ultrasonido (13) y para la recepción de pulsos de ultrasonido reflejados por un objeto, una unidad discriminadora (23) que está diseñada para determinar un punto focal (t5) del pulso de ultrasonido reflejado recibido, en base a un exceso de un primer valor umbral, y en base a un exceso consecutivo de un segundo valor umbral del pulso de ultrasonido reflejado recibido, y un dispositivo de evaluación de duración de trayectoria (24) que está diseñado para determinar la distancia en relación con el objeto, en base al punto focal determinado (t5) , caracterizado por un dispositivo de cálculo (27) para calcular la altura del objeto (12) en base a una amplitud de pulso (tb) del pulso de ultrasonido reflejado, la relación de la cantidad de pulsos de ultrasonidos reflejados con la cantidad de pulsos de ultrasonidos emitidos, y/o una distribución de los puntos focales de los pulsos de ultrasonidos reflejados de un objeto, y una unidad de corrección (28) diseñada para corregir la distancia determinada por el dispositivo de evaluación de la duración de trayectoria, en relación con la altura calculada.
2. Sensor de distancia de acuerdo con la reivindicación 1 con un dispositivo de análisis de ruido (25) para determinar una señal de ruido (IG) del emisor y del receptor de ultrasonidos (21, 22) , y un dispositivo de determinación del valor umbral (26) para establecer el primer valor umbral y el segundo valor umbral como múltiplo de la señal de ruido determinada.
3. Método para determinar una distancia en relación con un objeto mediante una medición del tiempo de propagación de un pulso de ultrasonido reflejado, en donde la finalización de la medición del tiempo de propagación se establece mediante un punto focal del pulso de ultrasonidos reflejado, caracterizado porque mediante un dispositivo de cálculo (27) se realiza un cálculo de la altura del objeto (12) en base a una amplitud de pulso (tb) del pulso de ultrasonido reflejado, de la relación de la cantidad de pulsos de ultrasonidos reflejados con la cantidad de pulsos de ultrasonidos emitidos, y/o de una distribución de los puntos focales de los pulsos de ultrasonidos reflejados de un objeto, y porque se proporciona una unidad de corrección (28) diseñada para corregir la distancia determinada por el dispositivo de evaluación de la duración de trayectoria, en relación con la altura calculada.
4. Método de acuerdo con la reivindicación 3, en donde el punto focal se determina como un punto en el tiempo que se encuentra entre un primer punto en el tiempo en el que se excede un primer valor umbral, y un segundo punto en el tiempo consecutivo en el que se pasa a un nivel inferior de un segundo valor umbral del pulso de ultrasonido.
5. Método de acuerdo con la reivindicación 4, en el que se determina el punto focal como una media ponderada del primer punto en el tiempo y del segundo punto en el tiempo.
6. Método de acuerdo con una de las reivindicaciones precedentes 3 a 5, en donde se calcula la altura del objeto en base a una pluralidad de pulsos de ultrasonidos reflejados, y la distancia determinada mediante la medición del tiempo de propagación se corrige en relación con la altura calculada del objeto.
7. Método de acuerdo con la reivindicación 6, en donde la altura del objeto se determina en base a una amplitud de pulso tb del pulso de ultrasonido reflejado, a la relación de la cantidad de pulsos de ultrasonidos reflejados con la cantidad de pulsos de ultrasonidos emitidos, y/o en base a una distribución de las distancias determinadas mediante mediciones del tiempo de propagación a partir de una pluralidad de pulsos de ultrasonidos reflejados.
8. Método de acuerdo con una de las reivindicaciones precedentes 3 a 7, en donde se determina una señal de ruido, y se establece el primer valor umbral y el segundo valor umbral como un múltiplo de la señal de ruido.
9. Método de acuerdo con una de las reivindicaciones precedentes 3 a 8, en el que se establecen el primer valor umbral y el segundo valor umbral en relación con la temperatura ambiente.
Patentes similares o relacionadas:
Procedimiento y dispositivo para determinar estado de terminal, y terminal, del 14 de Agosto de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento de control de una pantalla de un terminal, que comprende: transmitir (S101, S201), por un generador acústico de conducción ósea, una señal de […]
Método y dispositivo para una medición de alta precisión de una característica de un depósito de incrustaciones y/o descamaciones en el interior de un recipiente de fluido, o de una característica de una porción de la pared en el interior de un recipiente de fluido mediante la utilización de un transductor ultrasónico, del 21 de Marzo de 2018, de Solenis Technologies Cayman, L.P: Método para una medición de alta precisión de una característica de un depósito de incrustaciones y/o de descamaciones en el interior de un recipiente […]
Arquitectura de un sistema multiestático acústico, del 28 de Diciembre de 2016, de THALES: Sistema acústico que consta al menos de una base emisora que consta de unos medios de emisión de un pulso sonar y de al menos […]
 Sistema de sonar y método que proporciona baja probabilidad de impacto sobre mamíferos marinos, del 29 de Julio de 2015, de RAYTHEON COMPANY: Un sistema de sonar que comprende:
un generador de forma de onda adaptado para generar una forma de onda de baja probabilidad de impacto en mamíferos marinos, […]
Sistema de sonar y método que proporciona baja probabilidad de impacto sobre mamíferos marinos, del 29 de Julio de 2015, de RAYTHEON COMPANY: Un sistema de sonar que comprende:
un generador de forma de onda adaptado para generar una forma de onda de baja probabilidad de impacto en mamíferos marinos, […]
CIRCUITO COMPARADOR ADAPTATIVO Y SENSOR DE DISTANCIA ACUSTICO CON UN CIRCUITO DE ESTE TIPO., del 1 de Marzo de 2007, de PEPPERL + FUCHS GMBH: Circuito comparador adaptativo para un sensor de distancia acústico con un primer comparador , que presenta -una primera entrada de valor […]
PROCEDIMIENTO PARA LA MEDICION DE LA DISTANCIA Y REALIZACION DEL PROCEDIMIENTO., del 16 de Junio de 2003, de ROBERT BOSCH GMBH: Procedimiento para la medición de la distancia, con preferencia en automóviles, con impulsos de ultrasonido, donde una señal es irradiada con una forma […]
PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR UN NIVEL DE LIQUIDO CON AYUDA DE IMPULSOS DE ULTRASONIDOS., del 16 de Noviembre de 2002, de SIEMENS AKTIENGESELLSCHAFT: PARA MEJORAR LA EXACTITUD DE LA MEDICION DEL NIVEL DE UN LIQUIDO (H) EN UN RECIPIENTE A PARTIR DEL TIEMPO DE PASO DE IMPULSOS DE ULTRASONIDOS Y DE UNA VELOCIDAD MEDIA DEL […]
 MEDICION DE ALMACENAMIENTO DE MONEDAS, del 16 de Septiembre de 2007, de MARS, INCORPORATED: Método para determinar el número de monedas en un almacenamiento de monedas que incluye las etapas de generar un impulso acústico, generar […]
MEDICION DE ALMACENAMIENTO DE MONEDAS, del 16 de Septiembre de 2007, de MARS, INCORPORATED: Método para determinar el número de monedas en un almacenamiento de monedas que incluye las etapas de generar un impulso acústico, generar […]