CIP-2021 : B25J 9/02 : caracterizado por el movimiento de los brazos, p. ej. del tipo coordenadas cartesianas (B25J 9/06 tiene prioridad).
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/02[1] › caracterizado por el movimiento de los brazos, p. ej. del tipo coordenadas cartesianas (B25J 9/06 tiene prioridad).
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/02 · caracterizado por el movimiento de los brazos, p. ej. del tipo coordenadas cartesianas (B25J 9/06 tiene prioridad).
CIP2021: Invenciones publicadas en esta sección.
Aparatos y procedimientos para el accionamiento remoto de puntos de control.
(24/06/2020) Aparato para el accionamiento remoto de un punto de control , que comprende:
un elemento alargado que tiene un primer extremo y un segundo extremo,
un elemento de apoyo que tiene una parte móvil , la parte móvil está acoplada de manera ajustable con el elemento alargado a lo largo de cualquier parte de la longitud del elemento alargado de manera que el primer extremo y el segundo extremo del elemento alargado están libres del contacto con el aparato para el accionamiento remoto de un punto de control durante una función de accionamiento;
un mecanismo de impulso en comunicación con la parte móvil , el mecanismo de impulso está configurado para proporcionar par a la parte móvil y al elemento alargado en respuesta a una fuerza motriz, en el que el mecanismo de impulso está desplazado de la parte móvil …
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica.
(06/05/2020) Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado de detección con respecto a una estructura de sujeción para contener uno o más recipientes de muestras , que comprende:
(a) un sistema automatizado de detección configurado para procesar recipientes de muestras, teniendo dicho sistema de detección una carcasa que alberga una cámara interior ;
(b) una estructura de sujeción dentro de dicha cámara interior, teniendo dicha estructura de sujeción uno o más pozos de contención configurado para contener recipientes de muestras individuales, en la que dicha estructura de sujeción comprende además una o más referencias ;
(c) un mecanismo automatizado…
Dispositivo para recoger y depositar selectivamente artículos en un almacén automático.
(12/02/2020) Dispositivo para recoger y depositar selectivamente artículos, destinado a un almacén automático que comprende: un plano de soporte para el soporte temporal de un artículo (A); un soporte temporal para el soporte temporal de una bandeja (V) que está destinada a contener una cantidad predeterminada de artículos (A);
un manipulador , que está estructurado de tal manera que coja y libere un artículo (A) y traslade el artículo (A) entre el plano de soporte y el soporte temporal ; en el que el manipulador comprende un primer elemento de recogida y un segundo elemento de recogida , móviles independientemente uno con respecto…
SISTEMA AUTOMÁTICO PARA GRANALLADO DE PIEZAS.
(24/10/2019). Solicitante/s: ESEKI, S.A.L. Inventor/es: IRIGOYEN FRESNEDA,Jon, MURGIA MENDIA,Iñaki.
El sistema de la invención, partiendo de un brazo robótico de granallado convencional, centra sus características en que el mismo en vez de presentar una posición fija e inamovible, se dispone sobre un eje telescópico , desplazable verticalmente el cual a su vez es desplazable horizontalmente, según el eje Y a través de un segundo carro (8'), el cual a su vez es desplazable controladamente sobre unas guías longitudinales en la dirección X, a través de un primer carro . De esta manera, se consigue posicionar el brazo robótico prácticamente en cualquier posición con respecto a la pieza a granallar, evitando así tener que cambiar ésta constantemente de posición para llevar a cabo dicho proceso de granallado.
SISTEMA AUTOMÁTICO PARA GRANALLADO DE PIEZAS.
(17/10/2019). Solicitante/s: ESEKI, S.A.L. Inventor/es: IRIGOYEN FRESNEDA,Jon, MURGIA MENDIA,Iñaki.
Sistema automático para el granallado de piezas.
El sistema de la invención, partiendo de un brazo robótico de granallado convencional, centra sus características en que el mismo en vez de presentar una posición fija e inamovible, se dispone sobre un eje telescópico , desplazable verticalmente el cual a su vez es desplazable horizontalmente, según el eje Y a través de un segundo carro (8'), el cual a su vez es desplazable controladamente sobre unas guías longitudinales en la dirección X, a través de un primer carro . De esta manera, se consigue posicionar el brazo robótico prácticamente en cualquier posición con respecto a la pieza a granallar, evitando así tener que cambiar ésta constantemente de posición para llevar a cabo dicho proceso de granallado.
PDF original: ES-2727675_B2.pdf
PDF original: ES-2727675_A1.pdf
SISTEMA DE CONSTRUCCIÓN ROBOTIZADO.
(17/10/2019). Solicitante/s: EVOLUTION CONSTRUCTION SYSTEM, S.L. Inventor/es: LORENZO PELLICO,Daniel.
Sistema de construcción robotizado que comprende un robot cartesiano que puede ser elevado de manera automática según la construcción va ganando altura, que cuenta con un sistema de suministro robótico de los materiales y de las instalaciones eléctricas y electrónicas y que dispone de herramientas de fabricación especificas las cuales funcionan unas por aportación de capas de materiales constructivos líquidos, por ejemplo, de base de cemento que fraguan una vez depositados, por proyección de estos mismos materiales y otras por conformación y colocación en posición determinada de elementos constructivos.
ROBOT PARA REFORMAS Y REHABILITACIONES.
(17/10/2019). Solicitante/s: EVOLUTION CONSTRUCTION SYSTEM, S.L. Inventor/es: LORENZO PELLICO,Daniel.
Robot para reformas y rehabilitaciones de edificios que comprende una estructura de perfiles que comprende, al menos, dos largueros paralelos fijos, verticales o longitudinales, al menos, una barra transversal móvil, perpendicular a los largueros y desplazable de extremo a extremo entre dichos largueros mediante motores, y un carro de sujeción de una herramienta que también es móvil y desplazable de extremo a extremo a lo largo de la barra transversal también mediante motor, configurando dicha estructura un sistema móvil de coordenadas cartesianas que permite transportar tal herramienta a cualquier punto del plano sobre el que se instala la estructura , siendo movida mediante una controladora a la que se encuentra vinculada, y que recibe señales provenientes de sensores de posición de los motores y/o de sensores específicos previstos en la herramienta.
SISTEMA DE CONSTRUCCIÓN ROBOTIZADO.
(10/10/2019). Solicitante/s: EVOLUTION CONSTRUCTION SYSTEM, S.L. Inventor/es: LORENZO PELLICO,Daniel.
Sistema de construcción robotizado que comprende un robot cartesiano tipo pórtico que puede ser elevado de manera automática según la construcción va ganando altura, que cuenta con un sistema de suministro robótico de los materiales y de las instalaciones eléctricas y electrónicas y que dispone de herramientas de fabricación especificas las cuales funcionan unas por aportación de capas de materiales constructivos líquidos, por ejemplo, de base de cemento que fraguan una vez depositados, por proyección de estos mismos materiales y otras por conformación y colocación en posición determinada de elementos constructivos.
PDF original: ES-2726921_B2.pdf
PDF original: ES-2726921_A1.pdf
ROBOT PARA REFORMAS Y REHABILITACIONES.
(10/10/2019). Solicitante/s: EVOLUTION CONSTRUCTION SYSTEM, S.L. Inventor/es: LORENZO PELLICO,Daniel.
Robot para restauraciones y rehabilitaciones de edificios que comprende una estructura de perfiles que comprende, al menos, dos largueros paralelos fijos, verticales o longitudinales, al menos, una barra transversal móvil, perpendicular a los largueros y desplazable de extremo a extremo entre dichos largueros mediante motores, y un carro de sujeción de una herramienta que también es móvil y desplazable de extremo a extremo a lo largo de la barra transversal también mediante motor, configurando dicha estructura un sistema móvil de coordenadas cartesianas que permite transportar tal herramienta a cualquier punto del plano sobre el que se instala la estructura , siendo movida mediante una controladora a la que se encuentra vinculada, y que recibe señales provenientes de sensores de posición de los motores y/o de sensores específicos previstos en la herramienta.
PDF original: ES-2726918_A1.pdf
Sistema y método para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica.
(03/01/2018) Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado de detección con respecto a una estructura de sujeción para contener uno o más recipientes de muestras , que comprende:
(a) un sistema automatizado de detección para procesar recipientes de muestras, teniendo dicho sistema automatizado de detección una carcasa que alberga una cámara interior ;
(b) una estructura de sujeción dentro de dicha cámara interior, teniendo dicha estructura de sujeción uno o más pozos de contención para contener recipientes de muestras individuales, en la que dicha estructura de sujeción…
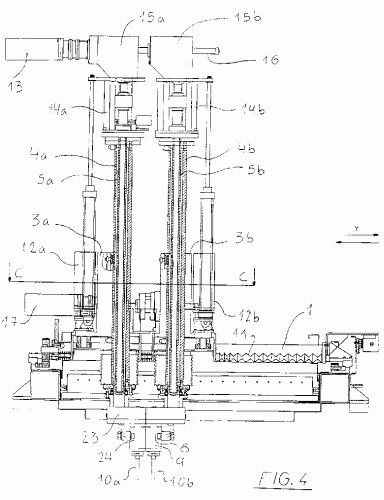
Equipo y método para trabajo mecánico.
(04/10/2017). Solicitante/s: BISIACH & CARRU'S.P.A.. Inventor/es: BISIACH, BRUNO.
Equipo para trabajo mecánico provisto de una unidad de trabajo móvil (1; 1') que a su vez comprende:
- un manipulador mecánico ;
- un cabezal de trabajo montado en el manipulador mecánico ;
- un carro de manipulación que soporta el manipulador mecánico , en el que el carro de manipulación está dispuesto para transportar el manipulador mecánico a una pluralidad de estaciones de trabajo (A, B) caracterizado porque la unidad de trabajo comprende una guía deslizante (11A, 11B, 12) y en donde el manipulador mecánico comprende uno o más pistones deslizantes montados de forma deslizante en la guía (11A, 11B, 12) y dispuestos para mover el cabezal de trabajo por medio de su movimiento deslizante.
PDF original: ES-2654988_T3.pdf
(14/06/2017) Aparato de manipulación, para transferir uno o más objetos de una vez entre dos estaciones de carga/descarga (PC, PS), presentando cada una de las mismas por lo menos un estante de soporte (P4) definido por dos soportes de apoyo opuestos que sobresalen, que soporta una pluralidad de objetos (R) conjuntamente, presentando cada objeto (R) dos extremos opuestos por los que descansan los objetos (R) en el estante de soporte (P4), comprendiendo el dispositivo de manipulación :
una estructura de soporte principal que presenta un desarrollo vertical,
un carro móvil motorizado , ligado a la estructura principal con libertad para trasladarse verticalmente,
unos medios (15, 16', 16'', 17) capaces de producir una traslación del carro móvil…
Dispositivo para el laqueado de piezas de trabajo.
(11/03/2015) Dispositivo para el laqueado de al menos una pieza de trabajo (W), que comprende al menos una pistola de inyección (10, 10'), que es desplazable de forma giratoria y/u horizontal y/o verticalmente y un soporte de piezas de trabajo , que es móvil en un plano-X-Y y/o es giratorio alrededor de un eje de rotación (R), caracterizado porque la pistola (10, 10') presenta dos toberas de inyección (11, 11'), que son giratorias y/o pivotables.
CONJUNTO DE MEDIOS MECÁNICOS INCORPORABLES A UN ROBOT DELTA PARA REALIZACIÓN DE ENGOMADO DE TAPAS.
(14/08/2014). Ver ilustración. Solicitante/s: MATRIRUIZ, S.L. Inventor/es: RUIZ GARCIA,ANTONIO, RUIZ PUCHE,Juan José.
Consiste en un conjunto de medios mecánicos diseñados específicamente para ser incorporados a un robot delta obteniéndose de este modo una máquina capaz de realizar el engomado de tapas de forma a una velocidad muy superior con respecto a las tradicionalmente empleadas y con unos rendimientos sensiblemente superiores. Dicha máquina queda definida por una pareja de brazos (3, 3') cuyos extremos disponen de una zona mecanizada con geometría rectangular donde se alojará el tope que asegura la conexión con el bulón . Los rodamientos (6, 6') quedan insertos en ambos lados de la zona mecanizada gracias a un mandrinado que tiene la particularidad de ser realizado desde la parte interior hacia fuera, de manera que el orificio no resulta pasante en su totalidad y los rodamientos (6, 6') hacen tope con la pared exterior del brazo.
Equipo para transferir recipientes de productos biológicos con inclinación ajustable de su eje de traslación.
(18/06/2014) Equipo para transferir recipientes de productos biológicos desde un soporte de interacoplamiento hasta un dispositivo de transporte y viceversa para recipientes biológicos, posicionados a alturas diferentes, que comprende un bastidor al cual se conecta un dispositivo de sujeción para recipientes de productos biológicos, móvil verticalmente con respecto a dicho bastidor y provisto de dedos adecuados para sujetar, transferir y liberar un recipiente para productos biológicos, siendo dicho bastidor enterizo con unos medios de deslizamiento a lo largo de una barra fijada a un cuerpo inclinable , estando a su vez dicho cuerpo inclinable conectado giratoriamente…
Controlador de soporte de brazo de vehículo de obras públicas, sistema de control para vehículo de obras públicas y procedimiento de control.
(06/06/2013) Un controlador de pluma de vehículo de obras públicas, que comprende: una pantalla táctil que comprende unvisualizador y un sensor táctil, una unidad controladora del visualizador, una unidad de control de visualización y unaunidad de generación de órdenes de control; en el que
la pantalla táctil muestra una marca de detección del accionamiento, detecta un toque exterior y genera una señal dedetección táctil que refleja una posición de un punto de toque sobre la pantalla táctil;
la unidad controladora del visualizador, en respuesta a una orden de control de visualización desde la unidad decontrol de visualización, proporciona unas instrucciones de visualización a la pantalla táctil para controlar uncontenido visualizado en la…
DISPOSITIVO DE GARRA PARA MANIPULACIÓN DE ELEMENTOS FLEXIBLES.
(05/07/2012) Dispositivo de garra para manipulación de elementos flexibles, acopiable a un brazo de robot a modo de efector final, que comprende un bastidor principal y una pluralidad de elementos de agarre acoplados en el bastidor principal mediante respectivos mecanismos de accionamiento (1 a-1f; 2a-2e; 3a- 3f; 4a-4g; 5a-5d; 6a-6g; 7a-7f; 8a-8e; 9a-9f) para agarrar un elemento flexible , caracterizado porque comprende al menos cuatro elementos de agarre para agarrar el elemento flexible ; al menos un elemento de agarre es un elemento de agarre multiposición independientemente desplazable, respecto de los demás elementos de agarre , en al menos una dirección paralela al plano definido por los demás elementos de agarre mediante un sistema de desplazamiento montado en el bastidor principal y en una dirección perpendicular (Z) a dicho plano mediante un…
DISPOSITIVO DE PULVERIZACION DESTINADO ESPECIALMENTE A UNA CABINA DE PINTURA DE CARROCERIA AUTOMOVIL.
(01/06/2007). Solicitante/s: EISENMANN FRANCE SARL. Inventor/es: RODRIGUES, JOSE, FOUVET, MICHEL.
Dispositivo de pulverización de un producto de recubrimiento destinado especialmente a una cabina de pintura para carrocerías automóviles , comprendiendo un brazo móvil permitiendo de asegurar un movimiento de seguimiento, paralelamente al eje de transporte del objeto a recubrir desplazándose en un plano horizontal sobre un transportador o similar, y a la extremidad del cual está situado colocado un pulverizador , caracterizado porque el brazo móvil está montado pivotante alrededor de un primer eje sobre una base formando una placa giratoria dispuesta en un plano sensiblemente vertical, estando dicho primer eje situado en un plano paralelo a dicha placa , estando la base montada pivotante alrededor de un eje sensiblemente horizontal y sensiblemente perpendicular al eje de transporte , y estando dicha base guiada para efectuar un movimiento de translación sensiblemente perpendicular a su eje de pivoteamiento.
NUEVOS DERIVADOS DE PIPERIDINA COMO MODULADORES DEL RECEPTOR CCR5 DE LA QUIMIOQUINA.
(16/05/2007) Un compuesto de fórmula (I): (Ver fórmula) en la que A está ausente o es (CH2)2; R1 es heterociclilo, en el que el grupo heterociclilo se selecciona de pirano, piperidina, piperazina, pirrolidina o azetidina, y R1 está opcionalmente mono-sustituido con alquilo C C1-6, cicloalquilo C3_7, fenilo {opcionalmente sustituido con halo, alquilo C1-4, alcoxi C1, 4, CF3 u OCF3}, S(O)2(alquilo C1_4), S(O)2(fluoroalquilo C1_4), S(O)2fenilo {opcionalmente sustituido con halo, ciano, alquilo C1, 4, alcoxi C1-4, CF3, OCF3, S (O)2(alquilo C1-4) o S(O)2(fluoroalquilo C1-4)}, bencilo {opcionalmente sustituido con halo, alquilo C1-4, alcoxi C1-4, CF3 u OCF3}, C(O)H, C(O)(alquilo C1-4), benzoilo {opcionalmente sustituido con halo, alquilo C1-4, alcoxi C1-4, CF3 u OCF3}, C(O)2(alquilo C1, 4), C(O)NH2, C(O)NH(alquilo C1-4) o C(O)NHfenilo {opcionalmente sustituido con…
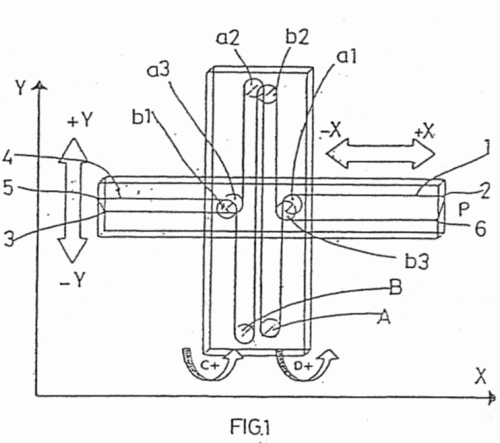
MECANISMO DE DESPLAZAMIENTO CARTESIANO, CON TRANSMISION UNICA Y DOBLE ACCIONAMIENTO.
(01/07/2006). Ver ilustración. Solicitante/s: SANCHEZ SOLER,JOSE MIGUEL ABAD MARTIN-CAMUAS,MIGUEL ANGEL PAYA VICENS,ARTEMIO. Inventor/es: SANCHEZ SOLER,JOSE MIGUEL, ABAD MARTIN-CAMUAS,MIGUEL ANGEL, PAYA VICENS,ARTEMIO.
Mecanismo de desplazamiento cartesiano, con transmisión única y doble accionamiento. Consistente en dos elementos de accionamiento acoplados a una transmisión única de poleas, disponiendo de dos ejes cartesianos, uno fijo y otro desplazable, ensamblado transversalmente con el anterior y que se desplaza de forma que los extremos alcancen cualquier punto del plano resultante, desplazamiento regulado mediante el giro al unísono, en el mismo sentido o en sentido contrario, de los accionadores, para desplazamiento paralelo a los ejes, así como el movimiento de uno y la detención del otro y viceversa, para desplazamiento diagonal, siendo la propia transmisión un elemento integrante para la conservación de la rigidez geométrica del conjunto y siendo el propio eje móvil parte activa de la transmisión.
(01/10/2004) Método para la transferencia rápida de un objeto de trabajo en las direcciones tanto horizontal como vertical usando una unidad de robot que tiene un mecanismo de sujeción desde una instalación de trabajo a otra , pesando el objeto de trabajo entre un kilo y cuarenta kilos y siendo la transferencia en la dirección horizontal al menos de un metro pero menos de diez metros y efectuándose al menos parcialmente a lo largo de una unidad de viga que se extiende sensiblemente en sentido horizontal estando colocada entre dichas estaciones de trabajo , y estando dispuesto el mecanismo de sujeción de tal modo que, al menos en una primera situación de extremo (E1), a lo largo…
MAQUINA DE SOLDADURA AUTOMATICA.
(16/01/2003) Máquina de soldadura automática con una placa de base para depositar piezas de trabajo a soldar y con una cabeza de soldadura de un dispositivo de soldadura que puede moverse en las direcciones A-B-C, en donde la cabeza de soldadura está acoplada a un mecanismo de movimiento X-Y- Z para mover automáticamente la cabeza de soldadura a lo largo de las piezas de trabajo de conformidad con una rutina de control almacenada en un equipo de control y prefijada por un proceso de aprendizaje precedente ("teach- in"), y en donde el mecanismo de movimiento X-Y-Z presenta tres equipos de movimiento lineal accionables cada uno por un motor , caracterizada porque los motores del mecanismo de movimiento…
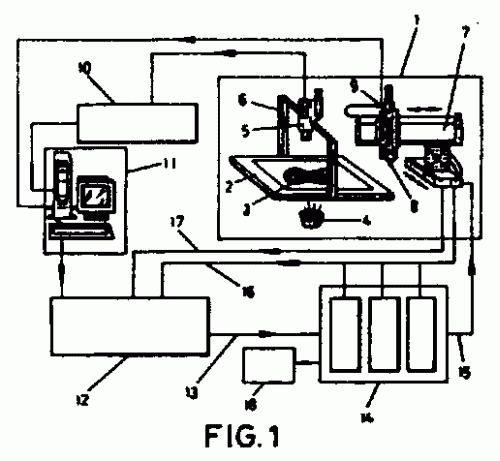
ROBOT CON VISION ARTIFICIAL PARA ENCOLADO AUTOMATICO DE SUELAS DE ZAPATO.
(16/03/2001). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MURCIA. Inventor/es: TOMAS BALIBREA,LUIS MANUEL, MATEO AROCA,ANTONIO.
Robot con visión artificial para encolado automático de suelas de zapato. Cuenta con un manipulador cartesiano de tres ejes dotado de una pistola de encolado y adyacente a una superficie de trabajo donde se ubica la suela a encolar . Bajo dicha superficie hay un sistema de iluminación y sobre ella hay una cámara conectada a una tarjeta de adquisición de imágenes que a su vez conecta con una unidad de control . La unidad de control conecta además con una tarjeta de control de motores que a través de amplificadores hace moverse al manipulador según las coordenadas y trayectorias, definidas por la tarjeta de adquisición de imágenes y correspondientes al contorno de la suela.
(01/04/2000). Solicitante/s: EISSFELLER, ROMAN. Inventor/es: EISSFELLER, ROMAN.
EL ROBOT INDUSTRIAL MUESTRA UN BRAZO DE TRABAJO MOVIL PARA EL MANEJO DE PIEZAS DE TRABAJO Y UN MECANISMO QUE MUEVE EL BRAZO DE TRABAJO. EL MECANISMO SE PONE A DISPOSICION A TRAVES DE TRES EQUIPOS DE MOVIMIENTO LINEAL, POR MEDIO DE LOS CUALES EL BRAZO DE TRABAJO ES MOVIL EN TRES DIRECCIONES ALINEADAS DE FORMA ORTOGONAL UNA CON RESPECTO A OTRA. EL ROBOT INDUSTRIAL ES APROPIADO ESPECIALMENTE EN UNA FORMA CONSTRUCTIVA LIGERA CON CHAPAS DE ALUMINIO Y/O DE CERO CONOCIDAS.
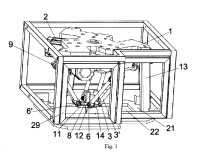
ROBOT PARA MAQUINAS DE LAVADO DE PIEZAS MECANIZADAS.
(16/02/2000). Ver ilustración. Solicitante/s: INGENIERIA AGULLO, S.A.. Inventor/es: AGULLO NEGUI,MIGUEL.
Robot para máquinas de lavado de piezas mecanizadas. Está dotado de movimiento en los tres ejes cartesianos y comprende un primer carro que se desliza en el sentido de las "x', estando montadas sobre dicho primer carro unas guías horizontales , dispuestas en el sentido de las "y', por encima de las cuales se deslizan dos segundos carros provistos de sendas barras verticales huecas , desplazables sobre sí mismas en el sentido de las "z', así como de un brazo tubular hueco , el extremo inferior del cual está sólidamente unido a la parte giratoria de un rácor rotativo alimentado por un conducto fijo . Al girar el brazo también se gira una lanza en su extremo inferior, la cual es alimentada con un líquido de lavado a través del rácor rotativo.
DISPOSITIVO PARA RECOGER ARTICULOS SOBRE PALETS Y SIMILARES.
(16/12/1999) EL DISPOSITIVO CONSTA DE UNA COLUMNA QUE SE MUEVE HORIZONTALMENTE A LO LARGO DE UN LADO DE UNA ESTRUCTURA ESTACIONARIA , UNA PIEZA TRANSVERSAL HORIZONTAL QUE SE MUEVE VERTICALMENTE A LO LARGO DE LA COLUMNA , UN CARRITO QUE SE MUEVE HORIZONTALMENTE A LO LARGO DE LA PIEZA TRANSVERSAL , Y UNA CABEZA ROTATORIA SUSTENTADA POR EL CARRITO Y EQUIPADA CON MECANISMO DE SUJECION . MECANISMOS DE DESPLAZAMIENTO PARA LA COLUMNA, LA PIEZA TRANSVERSAL, EL CARRITO Y LA CABEZA ROTATORIA SE LOCALIZAN DENTRO DE LA ESTRUCTURA . MECANISMOS FLEXIBLES SE PORTAN DENTRO DE LA ESTRUCTURA , LA COLUMNA Y LA PIEZA TRANSVERSAL…
(01/12/1996). Solicitante/s: FINMECCANICA S.P.A.. Inventor/es: PRIOLO, VINCENZO, REPETTO, GIORGIO.
SE DESCRIBE UN ROBOT PARA EL VACIADO DE UNA MAQUINA POSTAL DISPONIENDO DE LA UNA PLURALIDAD DE CONTENEDORES DENTRO DE LOS CUALES SON DEPOSITADOS LOS ELEMENTOS POSTALES (CARTAS Y TARJETAS) Y FORMANDO UNA FILA ORDENADA SUSTANCIALMENTE DE LOS OBJETOS UNO ENCIMA DE OTRO. EL ROBOT INCLUYE UNA ESTRUCTURA BASE LOCALIZADA SOBRE UNA ESTRUCTURA RECTILINEA DISPUESTA DE FORMA PARALELA A UNA PARED DE LA MAQUINA POSTAL Y UNA ESTRUCTURA DE COLUMNA QUE ESTA FIJADA A LA ESTRUCTURA BASE Y SOPORTA UN ELEMENTO DESLIZABLE DE FORMA VERTICAL SOBRE LA ESTRUCTURA DE COLUMNA. EL ELEMENTOS DESLIZANTE SOPORTA UN PAR DE BRAZOS QUE SE DESLIZAN RELATIVAMENTE AL ELEMENTO DESLIZANTE Y DISPONEN DE DISPOSITIVOS DE AGARRE EN SUS EXTREMOS DISPUESTOS PARA SER INTRODUCIDOS DENTRO DE UNO DE LOS CONTENEDORES PARA ASIR UNA PILA DE LOS OBJETOS POSTALES, PARA SU RETIRADA DEL CONTENEDOR Y PARA SER DEPOSITADOS SOBRE UNA CORREA TRANSPORTADORA.
DISPOSITIVO PARA EL MANEJO DE PIEZAS DE TRABAJO EN FORMA DE PLACA.
(16/03/1996) EL INVENTO SE REFIERE A UN DISPOSITIVO PARA EL MANEJO DE PIEZAS DE TRABAJO EN FORMA DE PLACA, CON UNA COLUMNA SOPORTE QUE DISCURRE VERTICALMENTE EN UNA SUPERFICIE HORIZONTAL MOVIL EN DIRECCION X EN EL QUE UN CARRO SOPORTE SE CONDUCE DE FORMA MOVIBLE EN DIRECCION Z Y MUESTRA UN BRAZO QUE SE EXTIENDE EN DIRECCION HORIZONTAL Y EN EL QUE SE CONDUCE EN UN EJE VERTICAL QUE GIRA (EJE-C), CON UNA TRAVIESA QUE PUEDE ASPIRAR A TRAVES DE UNA UNIDAD DE ASPIRACION . PARA LA FABRICACION ADECUADA DE UN DISPOSITIVO DE ESTE TIPO, QUE PERMITA EL MANEJO INTEGRADO DE PIEZAS DE TRABAJO EN FORMA DE PLACA DE MADERA, PLASTICO, MATERIA PRIMA DE UNION O TIPO SIMILAR EN CONEXION CON EL MECANIZADO POSTERIOR DE UNA PIEZA DE ESTE TIPO EN CENTROS DE DE MECANIZADO, SE PROPONE SEGUN ESTE DESCUBRIMIENTO QUE EL CARRO…
APARATO PARA DESPLAZAR UNIDADES DE TRABAJO A LO LARGO DE UNA TRAYECTORIA.
(01/11/1995). Solicitante/s: RESTA S.R.L.. Inventor/es: RESTA, ROBERTO, RESTA, MARIO, RESTA, RODOLFO.
EL APARATO TIENE UN BASTIDOR DE SOPORTE DEFINIDO POR CUATRO MONTANTES QUE SOPORTAN UN PAR DE VIGAS PARALELAS HORIZONTALES INTERCONECTADAS POR ELEMENTOS TRANSVERSALES QUE TIENEN GUIAS . UN CARRITO ACCIONADO POR MOTOR CON ENGRANAJES REDUCTORES SE MUEVE HORIZONTALMENTE A LO LARGO DE LAS GUIAS EN UNA PRIMERA DIRECCION. EL CARRITO SOPORTA MIRAS DE CORREDERA QUE SE EXTIENDEN PARALELAMENTE A LAS GUIAS . UN TROLE CARGADOR ACCIONADO POR UN MOTOR CON ENGRANAJES REDUCTORES SE MUEVE A LO LARGO DE LAS MIRAS DE CORREDERA EN UNA SEGUNDA DIRECCION QUE ES ORTOGONAL A LA PRIMERA DIRECCION. EL TROLE SOPORTA ROTATORIAMENTE UN BASTIDOR EN FORMA DE C QUE SE EXTIENDE HACIA ABAJO QUE TIENE UNA PLATAFORMA QUE SOPORTA UNA UNIDAD DE TRABAJO . EL BASTIDOR GUIA SOBRE UN EJE QUE ES PERPENDICULAR A LA PRIMERA DIRECCION DE MOVIMIENTO DEL CARRITO Y PERPENDICULAR A LA SEGUNDA DIRECCION DE MOVIMIENTO DEL TROLE CARGADOR.
PROCESO PARA EL REMACHE AUTOMATICO DE LOS BORDES DE PLACAS DE VIDRIO Y APARATO PARA LLEVAR A CABO DICHO PROCESO.
(01/08/1995) EL PROCESO DE REMACHE AUTOMATICO DE LOS BORDES DE PLACAS DE VIDRIO INCLUYE LOS SIGUIENTES PASOS: -FIJAR LAS PLACA DE VIDRIO EN UNA MESA DE TRABAJO; -ESTABLECER UN JUEGO DE COORDENADAS DE ESPACIO A LO LARGO DE DOS EJES ORTOGONALES X E Y DEL BORDE DE LA PLACA A REMACHAR, DETECTANDOSE LAS COORDENADAS POR MEDIO DE SECUENCIAS SUCESIVAS DE MOVIMIENTOS AUTOMATICOS DE UNA SONDA A LO LARGO DEL BORDE DE LA PLACA O ESTABLECIENDOSE EN UN TECLADO; -PROCESANDO LAS COORDENADAS CON EL OBJETO DE DETERMINAR EL PASO A SEGUIR POR EL CONTORNO DE UNA AFILADORA PARA PRODUCIR UN CONTORNO QUE ESTA CONSTITUIDO POR ARCOS MUTUAMENTE TANGENCIALES Y LINEAS RECTAS. -CALCULANDO LOS MOVIMIENTOS SUCESIVOS A LO LARGO DE LOS EJES X E Y QUE DEBE EJECUTAR EL CENTRO DE LA AFILADORA CON EL OBJETO DE REMACHAR EL BORDE DE LA PLACA DE ACUERDO CON EL DIAMETRO Y/O DESGASTE…
DISPOSITIVO PARA DESPLAZAR UN MOVIL Y EN PARTICULAR UN APRENSADOR DE MANUTENCION EN UN PLANO VERTICAL.
(01/10/1993). Solicitante/s: EUDE, BERNARD CLAUDE PIERRE. Inventor/es: EUDE, BERNARD CLAUDE PIERRE.
DISPOSITIVO PARA DESPLAZAR UN APRENSADOR DE MANUTENCION , QUE COMPRENDE UN PRIMER CARRO DESPLAZABLE A LO LARGO DE UNA PRIMERA PISTA Y UN SEGUNDO CARRO QUE PORTA EL MOVIL DESPLAZABLE A LO LARGO DE UNA SEGUNDA PISTA QUE PORTA EL MOVIL DESPLAZABLE A LO LARGO DE UNA SEGUNDA PISTA SECANTE DE LA PRIMERA. EL SEGUNDO CARRO SE EXTIENDE DE PARTE A PARTE DEL PRIMERO Y ES DESPLAZADO POR UN ORGANO MOTOR FIJO QUE ACCIONA UN ELEMENTO FLEXIBLE FORMADO POR DOS CABLES QUE SE EXTIENDEN DE PARTE A PARTE DE LA PRIMERA PISTA Y ESTAN INMOVILIZADOS EN SU EXTREMO OPUESTO AL ORGANO MOTOR, CADA CABLE PASA SOBRE UNOS PRIMEROS ORGANOS DE TRANSMISION MONTADOS EN EL PRIMER CARRO DE PARTE DE LA SEGUNDA PISTA Y SOBRE UNOS SEGUNDOS ORGANOS DE TRANSMISION 835) MONTADOS EN EL SEGUNDO CARRO MAS ALLA DE LOS PRIMEROS. EL PRIMER CARRO ESTA CONSTITUIDO POR CUATRO PLACAS ENFRENTADAS DOS A DOS PARA CONSTITUIR UN TUNEL PARA EL SEGUNDO CARRO.
DISPOSITIVO PARA UN SISTEMA DE MONTAJE DE LA TECNICA OPERATORIA, INTEGRADO POR UN ELEMENTO PORTADOR Y UNA UNIDAD DE TRINEOS.
(16/06/1992) LA INVENCION EN CUANTO A UN DISPOSITIVO CON POR LO MENOS UN ELEMENTO PORTADOR Y POR LO MENOS UNA UNIDAD DE TRINEOS DISPUESTA REGULABLE LINEAL AL MISMO PARA UN SISTEMA DE MONTAJE DE LA TECNICA OPERATORIA, CON ESTE DISPOSITIVO LA UNIDAD DE TRINEOS ESTA EN CONEXION DE EFECTO SOBRE UN ARTICULO DE ARRASTRE PARA CABLES ELECTRICO NEUMATICO O ELECTRICO HIDRAULICO CON UNA FUENTE DE ENERGIA Y DE SEÑAL. EL ELMENTO PORTADOR ESTA CONDORMADO COMO CONSTRUCCION DE CELULA Y TIENE UNA PISTA DE GUIA INTEGRADA, QUE MUESTRA CON RESPECTO A SUELOS HORIZONTALES Y PAREDES VERTICALES, UNA POSICION OBLICUA DENTRO DEL ELEMENTO PORTADOR , A TRAVES DEL CUAL SE ALCANZA UNA COLOCACION AHORRANDO ESPACIO AMPLIAMENTE PROTEGIDA CONTRA LA INTERVENCION EXTERIOR, DEL ARTICULO DE ARRASTRE PARA CABLES . LA UNIDAD DE TRINEOS ABARCA UN GRUPO DE ACCIONAMIENTO QUE ESTA DISPUESTO EN…
{kind=link}
{kind=link}
{kind=link}
{kind=link}