DISPOSITIVO DE GARRA PARA MANIPULACIÓN DE ELEMENTOS FLEXIBLES.
Dispositivo de garra para manipulación de elementos flexibles,
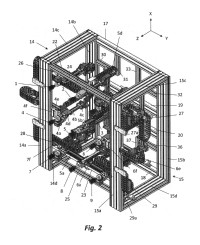
acopiable a un brazo de robot a modo de efector final, que comprende un bastidor principal (14, 15, 17, 18, 19, 20, 24, 25) y una pluralidad de elementos de agarre (1 - 9) acoplados en el bastidor principal mediante respectivos mecanismos de accionamiento (1 a-1f; 2a-2e; 3a- 3f; 4a-4g; 5a-5d; 6a-6g; 7a-7f; 8a-8e; 9a-9f) para agarrar un elemento flexible (10), caracterizado porque comprende al menos cuatro elementos de agarre (1 -9) para agarrar el elemento flexible (10); al menos un elemento de agarre (5) es un elemento de agarre multiposición independientemente desplazable, respecto de los demás elementos de agarre (1 -4, 6-9), en al menos una dirección paralela al plano definido por los demás elementos de agarre (1 -4, 6-9) mediante un sistema de desplazamiento (16, 38, 39, 40, 41, 42, 45) montado en el bastidor principal (14, 15, 17, 18, 19, 20, 24, 25) y en una dirección perpendicular (Z) a dicho plano mediante un accionamiento vertical (5b); al menos dos de los demás elementos de agarre (1 -4, 6-9) que definen el plano anteriormente mencionado son independientemente desplazables en cualquier dirección (X, Y) dentro de dicho plano mediante respectivos sistemas de desplazamiento bidireccional adicionales montados en el bastidor principal (14, 15. 17, 18. 19, 20, 24, 25): los elementos de agarre (1 -9) son automáticamente ajustables en sus respectivas posiciones de manera que quedan dispuestos en un mismo plano para capturar el elemento flexible (10) en configuración plana bidimensional y, una vez capturado el elemento flexible (10), moverse para generar en el elemento flexible (10) una configuración tridimensional sin generar esfuerzos de estiramiento sobre el elemento flexible (10).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/ES2010/070880.
Solicitante: FUNDACION FATRONIK.
Nacionalidad solicitante: España.
Inventor/es: COLLADO JIMENEZ, VALENTIN, GARCIA MARTINEZ, JOSE RAMON, BELOKI ZUBIRI,Oihane, MEZZACASA LASARTE,Riccardo, ESTENSORO ASTIGARRAGA,Francisco José, SEGURA MORENO,Miguel, IRASTORZA ARREGUI,Xabier.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J15/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Cabezas de aprehensión.
- B25J9/02 B25J […] › B25J 9/00 Manipuladores de control programado. › caracterizado por el movimiento de los brazos, p. ej. del tipo coordenadas cartesianas (B25J 9/06 tiene prioridad).
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Procedimiento de producción de una pieza, del 13 de Mayo de 2020, de Flex-N-Gate France: Procedimiento de producción de una pieza que incluye, al menos, un elemento de refuerzo fabricado a partir de un inserto fibroso de material […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]