Vehículo de motor comprendiendo un sistema de asistencia al conductor con una instalación de control para la guía longitudinal automática.
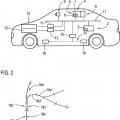
Vehículo de motor, comprendiendo un sistema de asistencia al conductor (2) con una instalación de control (3) para la guía longitudinal automática del vehículo de motor (1),
un sistema de navegación (4) comprendiendo un medio de almacenamiento (5) con datos de trayecto (6) y propiedades de trayecto (7), un sistema de determinación de la posición (8) para la determinación de la posición del vehículo geográfica, así como uno o varios actuadores previstos en el vehículo que pueden controlarse directa o indirectamente mediante la instalación de control (3) en el marco de la guía longitudinal,
caracterizado por que
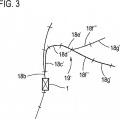
la instalación de control (3) está configurada para la determinación predictiva de una sección de trayecto (19) que se encuentra delante del vehículo de motor (1), la cual será recorrida probablemente por el vehículo de motor (19), en base a la posición del vehículo momentánea determinada y a datos de trayecto (6) determinados en dependencia de la posición y para el control de uno o de varios actuadores en dependencia de al menos una propiedad de trayecto (7) asignada a la sección de trayecto (19) determinada, que puede detectarse en su posición geográfica, estando configurada la instalación de control (3) para la priorización de las secciones de trayecto (19) en caso de existir varias secciones de trayecto (19) diferentes posibles.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12003442.
Solicitante: AUDI AG.
Nacionalidad solicitante: Alemania.
Dirección: 85045 INGOLSTADT ALEMANIA.
Inventor/es: BRUNNER,KARL-HEINZ.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60W30/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Control de crucero.
- B60W30/18 B60W 30/00 […] › Propulsión del vehículo.
PDF original: ES-2550043_T3.pdf

Fragmento de la descripción:
Vehículo de motor comprendiendo un sistema de asistencia al conductor con una instalación de control para la guía longitudinal automática La invención se refiere a un vehículo de motor, comprendiendo un sistema de asistencia al conductor con una instalación de control para la guía longitudinal automática del vehículo de motor, un sistema de navegación comprendiendo un medio de almacenamiento con datos de trayecto y propiedades de trayecto, un sistema de determinación de la posición para la determinación de la posición del vehículo geográfica, así como uno o varios actuadores previstos en el vehículo, que pueden controlarse directa o indirectamente a través de la instalación de control en el marco de la guía longitudinal.
El documento US 2010/292904 A1 divulga un vehículo de motor de este tipo.
Los vehículos de motor modernos disponen además de los sistemas de navegación instalados ya casi de manera estándar y de sistemas de determinación de la posición, también de un sistema de asistencia al conductor, que sirve para la guía longitudinal automática del vehículo de motor. Mediante el sistema de asistencia al conductor, habitualmente también sistema ACC (ACC = adaptive cruise control) , o su instalación de control, se controlan diferentes actuadores previstos en el vehículo en dependencia de la situación detectada, para llevar a cabo determinadas maniobras de conducción de manera automatizada, es decir, sin la intervención del conductor, que se adaptan a la situación dada, que fueron determinadas respectivamente como resultado de ésta en el marco de la guía longitudinal o regulación longitudinal por parte de la instalación de control. Como actuadores pueden controlarse por ejemplo, los frenos del sistema de frenado, como también el motor mismo, que dependiendo de la situación dada, se controla por ejemplo, en el marco de un mantenimiento de la distancia con respecto a un vehículo precedente.
Es conocido además, llevar a cabo mediante la utilización de un sistema de asistencia al conductor de este tipo, una guía longitudinal o regulación longitudinal eficiente energéticamente o en lo que al consumo se refiere o con el objetivo de un consumo de energía lo más reducido posible, para realizar por lo tanto mediante una guía longitudinal automática un consumo de energía lo más bajo posible. Una estrategia de regulación de este tipo prevé en este caso la utilización de maniobras de conducción eficientes energéticamente, como una desaceleración en punto muerto (circulación en punto muerto) , la utilización del corte de inyección (funcionamiento por empuje del motor) , así como la combinación de las dos maniobras, eventualmente también junto con el control del sistema de frenado. La base para ello son informaciones referentes al trayecto que se encuentra delante del vehículo. Para la función de una guía longitudinal eficiente energéticamente de este tipo, es necesario por lo tanto definir un destino por parte del sistema de navegación, por consiguiente, determinar por lo tanto anteriormente un trayecto definido hasta el destino y detectar las propiedades del trayecto registradas igualmente para ello en el medio de almacenamiento, que son relevantes para la regulación de bajo consumo eficiente energéticamente que tienen respectivamente un contenido de información, que puede utilizarse en este sentido. La estrategia de regulación tiene un funcionamiento tal, que mediante el sistema de determinación de la posición se detecta de manera continua la posición real del vehículo. Partiendo de ello, se detectan dentro del trayecto origen-destino predeterminado, definido en el sistema de navegación, las propiedades del trayecto relevantes en la regulación que se encuentran directamente delante, como por ejemplo, las limitaciones de la velocidad (señales de limitación de la velocidad) , curvas, características topográficas (pendiente descendente, pendiente ascendente) , como también su posición geográfica, de manera que siempre se tiene conocimiento sobre qué posición relativa tienen el vehículo y la propiedad del trayecto entre sí. La instalación de control del sistema de asistencia al conductor, que lleva a cabo finalmente la evaluación correspondiente a esta detección, está ahora en posición de calcular una estrategia de regulación correspondiente, partiendo por ejemplo, de la velocidad real dada, de determinar un trayecto de desaceleración correspondiente, el cual es necesario para que el vehículo desacelere en punto muerto y al alcanzar la propiedad del trayecto, en este caso por lo tanto, una señal de limitación de la velocidad, alcance la velocidad predeterminada, así como también el lugar correspondiente al momento del inicio del proceso de desaceleración. De manera parecida, durante el funcionamiento de circulación en punto muerto también puede conectarse correspondientemente el funcionamiento por empuje del motor, cuando hay una pendiente descendente o similar.
Es premisa siempre, que en el sistema de navegación se haya fijado un destino, por consiguiente, al mismo tiempo también, se dé una guía de navegación. Sin embargo, no siempre se desea o es necesaria una guía de navegación.
La invención se basa por lo tanto en el problema de indicar un vehículo de motor que esté mejorado frente a ello. Para la solución de este problema está previsto según la invención en un vehículo de motor del tipo mencionado inicialmente, que la instalación de control esté configurada para la determinación predictiva de una sección de trayecto que se encuentra delante del vehículo de motor, la cual probablemente será recorrida por el vehículo de motor, a partir de la posición del vehículo momentánea determinada y de los datos de trayecto determinados en dependencia de la posición, y para el control de uno o de varios actuadores en dependencia de al menos una de las propiedades del trayecto asignadas a la sección de trayecto determinada, que puede detectarse en su posición
geográfica, estando configurada la instalación de control para la priorización de las secciones de trayecto en caso de ser posibles varias secciones de trayecto diferentes.
El vehículo de motor según la invención posibilita con particular ventaja, el aprovechamiento de maniobras de conducción eficientes energéticamente, también en rutas que no están definidas mediante un destino en el sistema de navegación. Para ello se prevé según la invención, que la instalación de control determine predictivamente una sección de trayecto recorrida con una alta probabilidad por el vehículo, que se encuentra delante del vehículo, es decir, que prevea un trayecto probable. Para ello es necesaria una determinación continua de la posición del vehículo geográfica actual a través del sistema de determinación de la posición, en base a la cual se produce la determinación de la sección de trayecto. Para ello se evalúan los datos del trayecto registrados por parte del vehículo ya de por sí en el medio de almacenamiento del sistema de navegación, es decir, informaciones sobre calles correspondientes a trayectos, su transcurso, etc., y se determina una sección de trayecto, la cual se supone con una alta probabilidad, será recorrida por el vehículo. Esta sección de trayecto, que eventualmente puede estar dividida en segmentos definidos, se establece como base entonces para la determinación de una o de varias secciones de propiedades de trayecto asignadas. Como propiedades de trayecto han de entenderse aquellas informaciones del trayecto que se refieren a la sección, que son adecuadas de alguna manera para su utilización como base para una estrategia de regulación eficiente energéticamente. Las propiedades de trayecto son por ejemplo, indicaciones sobre la velocidad, es decir, señales de límite de velocidad aplicable, informaciones sobre el tipo de vía, por ejemplo, autovía, vía rápida o carretera nacional, las cuales tienen asociadas respectivamente diferentes indicaciones sobre la velocidad, curvas en la vía junto con informaciones sobre su radio de curvatura (es decir, curvas más o menos cerradas) , así como también informaciones topográficas referentes a pendientes descendentes, pendientes ascendentes y rectas. Las propiedades son por lo tanto objetos de regulación, en relación a los cuales se produce el control de los actuadores. Los datos de trayecto son informaciones generales con respecto a todos los recorridos posibles, es decir, el mapa digital mismo, no quedando excluido, que una fecha de trayecto, particularmente en relación con informaciones sobre curvas y sus radios de curvatura, también pueda ser una propiedad de trayecto. Como actuadores pueden utilizarse y controlarse todos los componentes correspondientes a sistemas que puedan incluirse de alguna manera... [Seguir leyendo]
Reivindicaciones:
1. Vehículo de motor, comprendiendo un sistema de asistencia al conductor (2) con una instalación de control (3) para la guía longitudinal automática del vehículo de motor (1) , un sistema de navegación (4) comprendiendo un medio de almacenamiento (5) con datos de trayecto (6) y propiedades de trayecto (7) , un sistema de determinación de la posición (8) para la determinación de la posición del vehículo geográfica, así como uno o varios actuadores previstos en el vehículo que pueden controlarse directa o indirectamente mediante la instalación de control (3) en el marco de la guía longitudinal, caracterizado por que la instalación de control (3) está configurada para la determinación predictiva de una sección de trayecto (19) que se encuentra delante del vehículo de motor (1) , la cual será recorrida probablemente por el vehículo de motor (19) , en base a la posición del vehículo momentánea determinada y a datos de trayecto (6) determinados en dependencia de la posición y para el control de uno o de varios actuadores en dependencia de al menos una propiedad de trayecto (7) asignada a la sección de trayecto (19) determinada, que puede detectarse en su posición geográfica, estando configurada la instalación de control (3) para la priorización de las secciones de trayecto (19) en caso de existir varias secciones de trayecto (19) diferentes posibles.
2. Vehículo de motor según la reivindicación 1, caracterizado por que una propiedad de trayecto (7) que puede ser la base del control, es una indicación sobre la velocidad, una curva de la vía y su transcurso de curvatura, y/o una información de vía topográfica.
3. Vehículo de motor según la reivindicación 1 o 2, caracterizado por que la instalación de control (3) está configurada para el control del o de los actuadores teniendo en cuenta al menos un parámetro de funcionamiento actual del vehículo de motor (1) .
4. Vehículo de motor según una de las reivindicaciones anteriores, caracterizado por que se proporcionan una cámara (9) y/o uno o varios sensores de zona, particularmente sensores de radar, estando configurada la instalación de control (3) para comprobar la plausibilidad de la posición geográfica detectada de una propiedad de trayecto (7) en la que basar el control y/o para controlar la plausibilidad de la propiedad de trayecto (7) misma y/o de la detección de otra propiedad de trayecto (7) mediante las imágenes proporcionadas por la cámara (9) y/o las informaciones proporcionadas por el o los sensores de zona.
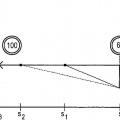
5. Vehículo de motor según una de las reivindicaciones anteriores, caracterizado por que la instalación de control (3) está configurada para la determinación de una distancia de desaceleración y para la determinación del momento del inicio de la intervención del control al determinarse una reducción de la velocidad o una pendiente descendente que va a producirse.
6. Vehículo de motor según una de las reivindicaciones anteriores, caracterizado por que la longitud máxima de una sección de trayecto (19) determinable está predeterminada.
7. Procedimiento para la guía longitudinal de un vehículo de motor (1) comprendiendo un sistema de asistencia al conductor (2) con una instalación de control (3) para la guía longitudinal automática del vehículo de motor (1) , un sistema de navegación (4) comprendiendo un medio de almacenamiento (5) con datos de trayecto (6) y propiedades de trayecto (7) , un sistema de determinación de la posición (8) para la determinación de la posición del vehículo geográfica, así como uno o varios actuadores (10, 12, 16) previstos en el vehículo, que pueden controlarse directa o indirectamente a través de la instalación de control (3) en el marco de la guía longitudinal, con los siguientes pasos:
- determinación de la posición del vehículo geográfica momentánea, -determinación de datos de trayecto (6) en dependencia de la posición del vehículo, -determinación de una sección de trayecto (19) recorrida probablemente mediante la posición del vehículo y los datos de trayecto (6) , estando configurada la instalación de control para la priorización de las secciones de trayecto (19) en caso de existir varias secciones de trayecto (19) diferentes posibles de la instalación de control (3) , -determinación de al menos una propiedad de trayecto (7) asignada a la sección de trayecto (19) , así como su posición geográfica en los datos de trayecto (6) , y -control de al menos un actuador en dependencia del contenido de información de la propiedad de trayecto (7) .
8. Procedimiento según la reivindicación 7, caracterizado por que como una propiedad de trayecto (7) en la que basar un control, se determina una indicación sobre la velocidad, una curva en la vía y su transcurso de curvatura, y/o una información de vía topográfica.
9. Procedimiento según la reivindicación 7 u 8, caracterizado por que la instalación de control (3) para el control del o de los actuadores tiene en cuenta al menos un parámetro de funcionamiento actual del vehículo de motor.
10. Procedimiento según una de las reivindicaciones 7 a 9, caracterizado por que mediante una cámara (9) prevista en el vehículo, se graban continuamente imágenes del campo precedente del vehículo, y/o que mediante uno o
varios sensores de zona previstos en el vehículo, particularmente sensores de radar, se graban informaciones del campo precedente del vehículo, llevando a cabo la instalación de control (3) una comprobación de la plausibilidad de la posición geográfica detectada de una de las propiedades de trayecto (7) en la que basar el control y/o de la propiedad de trayecto (7) misma mediante las imágenes y/o las informaciones.
11. Procedimiento según una de las reivindicaciones 7 a 10, caracterizado por que al determinar una propiedad de trayecto (7) no registrada en el medio de almacenamiento, mediante la evaluación de las imágenes de la cámara y/o de las señales del sensor, eventualmente tras llevar a cabo una comprobación de la plausibilidad mediante datos de trayecto (6) y/o propiedades de trayecto (7) conocidos, se produce el control en dependencia de la nueva propiedad de trayecto (7) detectada.
12. Procedimiento según una de las reivindicaciones 7 a 11, caracterizado por que para la determinación de la sección de trayecto (19) , primeramente se determina de entre los datos de trayecto (6) divididos en segmentos de trayecto, el segmento de trayecto en el que se encuentra el vehículo momentáneamente, mediante la posición el vehículo momentánea detectada, determinándose según esto segmentos de trayecto posteriores teniendo en cuenta informaciones referentes al transcurso del trayecto o propiedades de trayecto (7) y uniéndose para dar lugar a una sección de trayecto (19) .
13. Procedimiento según una de la reivindicaciones 7 a 12, caracterizado por que la instalación de control (3) determina al determinar una reducción de la velocidad o pendiente descendente que se va a producir, una distancia de desaceleración y el momento del inicio de la intervención del control.
Patentes similares o relacionadas:
Vehículo con un dispositivo de frenado, del 27 de Mayo de 2020, de Siemens Mobility GmbH: Vehículo con un dispositivo de frenado (21; 21'), que presenta al menos - una unidad de frenado por fricción (22; 22') con al menos componentes de frenado (31; 31') […]
Vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática, del 8 de Abril de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un operador de acelerador […]
 Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
Máquina de trabajo autopropulsada así como procedimiento para frenar una máquina de trabajo de este tipo, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular vehículo oruga tal como una niveladora, con un accionamiento eléctrico que comprende al menos un motor […]
Máquina de trabajo autopropulsada, así como procedimiento para frenar una máquina de trabajo de esa clase, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular un camión volquete o camión, con un accionamiento eléctrico que comprende al menos un motor […]
Sistema de control de vehículo, del 6 de Noviembre de 2019, de Abu Al-Rubb, Khalil: Un vehículo que comprende un espacio para pies que tiene una pared trasera y un sistema de control para el vehículo, comprendiendo el sistema de control un sistema […]
Procedimiento y dispositivo para la ayuda al cambio de velocidad y al cambio de vía, del 2 de Octubre de 2019, de PSA AUTOMOBILES S.A: Procedimiento de ayuda a la conducción que comprende una etapa de - determinación de una propuesta de cambio de vía, que requiere una primera validación, caracterizado […]
Aparato de control para un vehículo y método de control para un vehículo, del 19 de Junio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control para un vehículo , incluyendo el vehículo un motor de combustión , un primer motor eléctrico (MG1), un elemento rotativo […]