Sistemas de guiado de atraque y de identificación de aeronaves.
Un sistema para determinar si un objeto detectado es un objeto conocido,
teniendo el objeto conocido un perfil conocido y teniendo también una nariz con una altura de nariz conocida, comprendiendo el sistema:
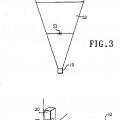
medios de proyección (21, 22) configurados para proyectar pulsos de luz sobre el objeto detectado;
medios de recogida (20) configurados para recoger pulsos de luz reflejados desde el objeto detectado y para detectar una forma de el objeto detectado de acuerdo con los pulsos de luz;
medios de comparación (26) configurados para comparar la forma detectada con un perfil que corresponde a una forma conocida y para determinar si la forma detectada corresponde a la forma conocida; caracterizado por comprender adicionalmente
medios de identificación (26) configurados para
- detectar una altura de nariz de el objeto detectado por medio de dichos medios de proyección y dichos medios de recogida
- identificar si el objeto detectado es el objeto conocido determinando si la altura de nariz detectada es la altura de nariz conocida.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09008939.
Solicitante: SAFEGATE INTERNATIONAL AB.
Nacionalidad solicitante: Suecia.
Dirección: DJURHAGEGATAN 19 21376 MALMO SUECIA.
Inventor/es: MILLGARD, LARS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64F1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64F INSTALACIONES EN TIERRA O INSTALACIONES EN CUBIERTA DE PORTAAVIONES ESPECIALMENTE ADAPTADAS PARA SU USO EN CONEXIÓN CON AERONAVES; DISEÑO, FABRICACIÓN, ENSAMBLAJE, LIMPIEZA, MANTENIMIENTO O REPARACIÓN DE AERONAVES, NO PREVISTOS EN OTRO LUGAR; MANIPULACIÓN, TRANSPORTE, ENSAYO O INSPECCIÓN DE COMPONENTES DE AERONAVES, NO PREVISTOS EN OTRO LUGAR. › Instalaciones en tierra o instalaciones en cubierta de portaaviones (adaptadas especialmente para aeronaves cautivas B64F 3/00).
- G01B11/24 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de contornos o curvaturas.
- G01S17/02 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio (G01S 17/66 tiene prioridad).
- G01S17/06 G01S 17/00 […] › Sistemas que determinan los datos de posición de un blanco.
- G01S17/08 G01S 17/00 […] › para medir la distancia únicamente (medición indirecta G01S 17/46; sistemas de triangulación activos G01S 17/48).
- G01S17/42 G01S 17/00 […] › Medida simultánea de la distancia y de otras coordenadas (medida indirecta G01S 17/46).
- G01S17/66 G01S 17/00 […] › Sistemas de seguimiento que utilizan ondas electromagnéticas que no sean ondas de radio.
- G01S17/87 G01S 17/00 […] › Combinaciones de sistemas que utilizan ondas electromagnéticas que no sean ondas de radio.
- G01S17/88 G01S 17/00 […] › Sistemas de lidar, especialmente adaptados para aplicaciones específicas.
- G01S17/89 G01S 17/00 […] › para la cartografía o la formación de imágenes.
- G01S17/93 G01S 17/00 […] › como anti-colisión.
- G06K9/32 G […] › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › G06K 9/00 Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00). › Alimentación o centrado del captador de imagen o de la zona de imagen.
- G06K9/62 G06K 9/00 […] › Métodos o disposiciones para el reconocimiento que utilizan medios electrónicos.
- G06T7/00 G06 […] › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
- G06T7/60 G06T […] › G06T 7/00 Análisis de imagen. › Análisis de los atributos geométricos.
- G08G5/06 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › para el control cuando el aparato está en tierra.
PDF original: ES-2552309_T3.pdf

Patentes similares o relacionadas:
Procedimiento para la detección y localización de un garaje y vehículo, del 6 de Mayo de 2020, de AUDI AG: Procedimiento para la detección y localización de al menos un garaje que ofrezca una plaza de aparcamiento para un vehículo en el vehículo , en donde el vehículo […]
Generador de imágenes y telémetro combinados, del 12 de Febrero de 2020, de Rafael Advanced Defense Systems Ltd: Un vehículo que comprende un generador de imágenes y un telémetro combinados (10A, 10B) que se montan en el vehículo, el generador de imágenes […]
Método para procesar pulsos de eco de un sensor láser 3d activo para proporcionar mediciones de distancia, del 24 de Julio de 2019, de HENSOLDT Sensors GmbH: Un método para procesar pulsos de eco de un sensor 3D activo para proporcionar mediciones de distancia del entorno frente al sensor, que comprende las siguientes […]
Sistema de seguimiento dinámico y método de guiado automático basado en cámaras 3D de tiempo de vuelo, del 3 de Abril de 2019, de Terabee S.A.S: Un sistema [Fig. 1, ] de seguimiento dinámico que comprende: - una cámara [Fig. 1, ] tridimensional basada en tecnología de tiempo […]
 Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Procedimiento y disposición para desarrollar un modelo tridimensional de un entorno, del 13 de Diciembre de 2018, de Vricon Systems Aktiebolag: Procedimiento para desarrollar un modelo 3D de un entorno, que comprende las etapas de: proporcionar una pluralidad de imágenes superpuestas del entorno […]
Luna con campo sensor ópticamente transparente, del 1 de Junio de 2016, de SAINT-GOBAIN GLASS FRANCE: Luna en forma de luna de parabrisas, o bien de una luna trasera de un vehículo, con un campo sensor ópticamente transparente, comprendiendo: a) al menos una […]
 Procedimiento para determinar una distancia de un objeto a un vehículo automóvil con la utilización de un sensor PMD, del 6 de Enero de 2016, de AUDI AG: Procedimiento para determinar una distancia de un objeto a un vehículo automóvil utilizando un sensor PMD , que comprende las siguientes etapas:
- en un […]
Procedimiento para determinar una distancia de un objeto a un vehículo automóvil con la utilización de un sensor PMD, del 6 de Enero de 2016, de AUDI AG: Procedimiento para determinar una distancia de un objeto a un vehículo automóvil utilizando un sensor PMD , que comprende las siguientes etapas:
- en un […]