Sistemas de guiado de atraque y de identificación de aeronaves.
Un sistema para determinar si una aeronave detectada es una aeronave conocida,
teniendo la aeronave conocidaun perfil conocido y teniendo también características conocidas primera y segunda en localizaciones conocidas,comprendiendo el sistema:
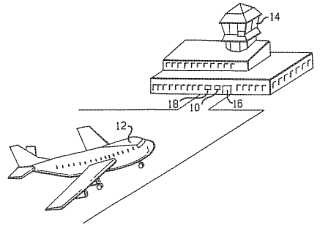
medios de proyección (21.22) para proyectar pulsos de luz sobre la aeronave detectada,medios de recogida (20) para recoger pulsos de luz reflejados desde la aeronave detectada y para detectar unaforma de la aeronave detectada de acuerdo con los pulsos de luz,
medios de comparación (26) para comparar la forma detectada con un perfil que corresponde a la forma conocida ypara determinar si la forma detectada corresponde a la forma conocida, y
medios de identificación (26) para identificar si la aeronave detectada es la aeronave conocida determinando si laaeronave detectada tiene las características conocidas primera y segunda en las localizaciones conocidas;en el que, para la aeronave conocida, está definido un volumen interior para cada una de las característicasconocidas primera y segunda para contener la respectiva característica conocida, y está definido un volumenexterior para cada una de las características conocidas primera y segunda para no contener la respectivacaracterística conocida;
en el que los medios de identificación están configurados para realizar un paso de coincidencia de perfil paradeterminar si la aeronave detectada tiene las características conocidas primera y segunda en las localizacionesconocidas de acuerdo con la determinación de un cociente de un número de pulsos de luz reflejados desde dentrodel volumen interior con respecto a un número de pulsos de luz reflejados desde dentro del volumen exterior einterior;
caracterizado el sistema porque:
los medios de identificación están configurados para realizar por lo menos un proceso de coincidencia de perfil dedos pasos, en el que un primer paso de coincidencia de perfil se realiza sobre dicha primera característica conocidapara la aeronave detectada, tal como una forma como la nariz de la aeronave detectada, y en el que un segundopaso de coincidencia de perfil se realiza sobre dicha segunda característica conocida para la aeronave detectada, talcomo un componente adicional de la aeronave detectada que es diferente de la primera característica conocida.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2000/029530.
Solicitante: SAFEGATE INTERNATIONAL AB.
Nacionalidad solicitante: Suecia.
Dirección: DJURHAGEGATAN 19 21376 MALMO SUECIA.
Inventor/es: MILLGARD, LARS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64F1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64F INSTALACIONES EN TIERRA O INSTALACIONES EN CUBIERTA DE PORTAAVIONES ESPECIALMENTE ADAPTADAS PARA SU USO EN CONEXIÓN CON AERONAVES; DISEÑO, FABRICACIÓN, ENSAMBLAJE, LIMPIEZA, MANTENIMIENTO O REPARACIÓN DE AERONAVES, NO PREVISTOS EN OTRO LUGAR; MANIPULACIÓN, TRANSPORTE, ENSAYO O INSPECCIÓN DE COMPONENTES DE AERONAVES, NO PREVISTOS EN OTRO LUGAR. › Instalaciones en tierra o instalaciones en cubierta de portaaviones (adaptadas especialmente para aeronaves cautivas B64F 3/00).
- G01B11/24 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de contornos o curvaturas.
- G01S17/02 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio (G01S 17/66 tiene prioridad).
- G01S17/06 G01S 17/00 […] › Sistemas que determinan los datos de posición de un blanco.
- G01S17/08 G01S 17/00 […] › para medir la distancia únicamente (medición indirecta G01S 17/46; sistemas de triangulación activos G01S 17/48).
- G01S17/42 G01S 17/00 […] › Medida simultánea de la distancia y de otras coordenadas (medida indirecta G01S 17/46).
- G01S17/66 G01S 17/00 […] › Sistemas de seguimiento que utilizan ondas electromagnéticas que no sean ondas de radio.
- G01S17/87 G01S 17/00 […] › Combinaciones de sistemas que utilizan ondas electromagnéticas que no sean ondas de radio.
- G01S17/88 G01S 17/00 […] › Sistemas de lidar, especialmente adaptados para aplicaciones específicas.
- G01S17/89 G01S 17/00 […] › para la cartografía o la formación de imágenes.
- G01S17/93 G01S 17/00 […] › como anti-colisión.
- G06K9/32 G […] › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › G06K 9/00 Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00). › Alimentación o centrado del captador de imagen o de la zona de imagen.
- G06K9/62 G06K 9/00 […] › Métodos o disposiciones para el reconocimiento que utilizan medios electrónicos.
- G06T7/00 G06 […] › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
- G06T7/60 G06T […] › G06T 7/00 Análisis de imagen. › Análisis de los atributos geométricos.
- G08G5/06 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › para el control cuando el aparato está en tierra.
PDF original: ES-2399876_T3.pdf
Fragmento de la descripción:
Sistemas de guiado de atraque y de identificación de aeronaves Referencia a solicitudes relacionadas Esta es una continuación en parte de la solicitud de patente de EE.UU. nº 09/429609, presentada el 29 de octubre de 1999, actualmente en tramitación, que es una continuación en parte de la solicitud de patente de EE.UU. nº 08/817368, presentada el 17 de julio de 1997, ahora patente de EE.UU. nº 6.023.665, que es la fase nacional en EE.UU. de la solicitud internacional PCT nº PCT/SE94/00968, presentada el 14 de octubre de 1994, publicada el 25 de abril de 1996 como documento WO 96/12265 A1.
Antecedentes de la invención Campo de la invención Esta invención se refiere a sistemas para localizar, identificar y seguir objetos. Más particularmente, se refiere a sistemas de localización, identificación y guiado de atraque de aeronaves y a métodos de control de tráfico de tierra para localizar e identificar objetos en un campo de aviación o aeródromo y para atracar de forma segura y eficiente una aeronave en tal aeropuerto.
Descripción de técnica relacionada En los últimos años ha habido una cantidad significativamente mayor de tráfico de aeronaves de pasajeros, de carga y otras incluyendo despegues, aterrizajes y otro tráfico terrestre de aeronaves. También, ha habido un marcado incremento en el número de vehículos de soporte terrestre que se requiere que descarguen cargamento, proporcionen servicios de catering y mantenimiento y soporte continuado de todas las aeronaves. Con este incremento sustancial en el tráfico de tierra ha llegado la necesidad de un mayor control y seguridad en el atraque y la identificación de las aeronaves en un aeródromo.
Ejemplos de sistemas de técnica anterior que se han propuesto para detectar la presencia de aeronaves y de otro tráfico en un aeródromo son los sistemas descritos en la patente de EE.UU. 4.995.102, la patente europea nº 188757 y las solicitudes PCT publicadas WO 93/13104 y WO 93/15416, y la WO 96/12265, en la que se basa el preámbulo de las reivindicaciones independientes 1 y 6.
Sin embargo, ninguno de estos sistemas se ha encontrado satisfactorio para la detección de la presencia de la aeronave en un aeródromo, particularmente en condiciones climáticas adversas que causan una visibilidad reducida, tales como las encontradas bajo condiciones de niebla, nieve o aguanieve. Además, ninguno de los sistemas descritos en las referencias anteriores es capaz de identificar y verificar el tipo específico de una aeronave que se aproxima. Aún más, ninguno de los sistemas anteriores proporciona técnicas adecuadas para el seguimiento y atraque de una aeronave en un punto de parada designado tal como una puerta de carga de aeropuerto. Además, ninguno de los sistemas anteriores ha proporcionado técnicas que permitan la calibración adecuada del instrumento en ellos.
El sistema divulgado en la solicitud principal citada anteriormente busca superar los problemas indicados anteriormente mediante coincidencia de perfil. Pulsos de luz desde un telémetro láser (LRF por sus siglas en inglés “Laser Range Finder”) se proyectan en coordenadas angulares en el avión. Los pulsos de luz se reflejan desde el avión para detectar una forma del avión o de una porción del avión, por ejemplo, la nariz. La forma detectada se compara con un perfil que corresponde a la forma de un modelo conocido de avión para determinar si la forma detectada se corresponde con la forma del modelo conocido.
Sin embargo, este sistema tiene un inconveniente. A menudo, dos o más modelos de aviones tienen perfiles de nariz tan similares que un modelo es a menudo confundido con otro. En particular, en condiciones meteorológicas adversas, muchos ecos se pierden, de manera que la discriminación de perfil se vuelve cada vez menos fiable. Dado que los modelos son similares pero no idénticos en la configuración del cuerpo, una posición de atraque correcta para uno puede causar que un motor de otro choque contra un obstáculo físico.
De este modo, ha sido un problema continuo proporcionar sistemas que sean suficientemente seguros y fiables en un amplio rango de condiciones atmosféricas para permitir la detección de objetos tales como aeronaves y otro tráfico terrestre en un aeródromo.
Además, ha existido la necesidad desde hace mucho tiempo de sistemas que no sólo son capaces de detectar objetos tales como aeronaves, sino que también proporcionan la identificación efectiva del objeto detectado y la verificación de la identidad de tal objeto, por ejemplo una aeronave detectada, con el grado necesario de certeza independientemente de las condiciones climáticas imperantes y la magnitud del tráfico terrestre.
También ha existido la necesidad insatisfecha desde hace mucho tiempo de sistemas que son capaces de seguir y guiar de forma precisa y eficiente objetos tales como aeronaves entrantes hasta un punto de parada adecuado tal como una puerta de carga de aeropuerto. Además, el proporcionamiento de técnicas de calibración precisas y efectivas para tales sistemas ha sido un problema continuo que requiere resolución.
Sumario de la invención Será fácilmente evidente a partir de lo anterior que existe en la técnica la necesidad de una identificación más precisa de las aeronaves.
Por tanto, es un objeto primario de la invención distinguir entre múltiples modelos de aviones con formas de nariz idénticas o casi idénticas.
Es un objeto adicional de la invención mejorar la detección de aeronaves con el fin de evitar accidentes durante el atraque de aeronaves.
Para conseguir los objetos anteriores y otros, la presente invención identifica aeronaves en un proceso de dos pasos. En primer lugar, la coincidencia de perfil se realiza como se conoce a partir de la solicitud principal anteriormente identificada. En segundo lugar, se lleva a cabo al menos una coincidencia de criterio de aeronave. En la coincidencia de criterio de aeronave, un componente de la aeronave, tal como el motor, se selecciona como base para distinguir entre aeronaves. El desplazamiento de ese componente desde otro componente fácilmente localizado, tal como la nariz, se determina de la siguiente manera. Se define un volumen interior en el que se espera que esté el motor, y se define también un volumen exterior que rodea el volumen interior. El LRF se dirige a los volúmenes interior y exterior para producir ecos de los dos volúmenes. Se coge una relación del número de ecos en los volúmenes interiores con respecto al número de ecos en ambos volúmenes. Si ese eco supera un umbral dado, se determina que el motor está presente en el volumen interior, y se considera que la aeronave se ha identificado. Si la identificación de la aeronave es todavía ambigua, otro criterio de aeronave, tal como la cola, puede ser detectado.
Los criterios de aeronave elegidos para la segunda fase de la identificación son diferencias físicas que pueden ser detectadas por un telémetro láser. Un ejemplo de tal criterio es la posición, lateral y longitudinalmente, de un motor en relación con la nariz de la aeronave. Para considerar una aeronave identificada, el patrón del eco no sólo debe reflejar un fuselaje de forma correcta. También debe reflejar que hay un motor en una posición, con relación a la nariz, donde la aeronave esperada sí tiene un motor. Otros ejemplos de criterios que se pueden utilizar son la posición del tren principal, la posición de las alas y la posición de la cola.
La coincidencia se realiza preferiblemente sólo contra los criterios específicos para el tipo de aeronave esperado. Sería muy laborioso hacer coincidir contra los criterios de todos los demás tipos posibles. Tal coincidencia tendría que ser contra de todo tipo de aeronave que pueden aterrizar en un aeropuerto concreto.
Para cada puerta hay definida una posición de parada para cada tipo de aeronave que se planea que va a atracar en esa puerta. Puede haber un riesgo de seguridad si cualquier otro tipo se acerca a la puerta. La posición de parada se define de manera que hay un margen de seguridad suficiente entre la puerta y la aeronave para evitar una colisión. La posición de parada para cada tipo de aeronave se define a menudo como la posición de tren delantero cuando la puerta está en la posición apropiada en relación a la puerta. Hay una base de datos en el sistema donde se almacena la distancia desde la nariz al tren delantero para cada tipo de aeronave. El sistema de atraque guía la aeronave con respecto a su posición de nariz y detiene la aeronave con su nariz en una posición en la que el tipo correcto tendrá su tren delantero en la posición de parada correcta. Si se atraca el tipo incorrecto y si tiene sus alas o motores más cerca de la nariz que el tipo correcto,... [Seguir leyendo]
Reivindicaciones:
1. Un sistema para determinar si una aeronave detectada es una aeronave conocida, teniendo la aeronave conocida un perfil conocido y teniendo también características conocidas primera y segunda en localizaciones conocidas, comprendiendo el sistema:
medios de proyección (21.22) para proyectar pulsos de luz sobre la aeronave detectada,
medios de recogida (20) para recoger pulsos de luz reflejados desde la aeronave detectada y para detectar una forma de la aeronave detectada de acuerdo con los pulsos de luz,
medios de comparación (26) para comparar la forma detectada con un perfil que corresponde a la forma conocida y para determinar si la forma detectada corresponde a la forma conocida, y
medios de identificación (26) para identificar si la aeronave detectada es la aeronave conocida determinando si la aeronave detectada tiene las características conocidas primera y segunda en las localizaciones conocidas;
en el que, para la aeronave conocida, está definido un volumen interior para cada una de las características conocidas primera y segunda para contener la respectiva característica conocida, y está definido un volumen exterior para cada una de las características conocidas primera y segunda para no contener la respectiva característica conocida;
en el que los medios de identificación están configurados para realizar un paso de coincidencia de perfil para determinar si la aeronave detectada tiene las características conocidas primera y segunda en las localizaciones conocidas de acuerdo con la determinación de un cociente de un número de pulsos de luz reflejados desde dentro del volumen interior con respecto a un número de pulsos de luz reflejados desde dentro del volumen exterior e interior;
caracterizado el sistema porque:
los medios de identificación están configurados para realizar por lo menos un proceso de coincidencia de perfil de dos pasos, en el que un primer paso de coincidencia de perfil se realiza sobre dicha primera característica conocida para la aeronave detectada, tal como una forma como la nariz de la aeronave detectada, y en el que un segundo paso de coincidencia de perfil se realiza sobre dicha segunda característica conocida para la aeronave detectada, tal como un componente adicional de la aeronave detectada que es diferente de la primera característica conocida.
2. El sistema de la reivindicación 1, en el que se define que el volumen exterior rodea el volumen interior.
3. El sistema de la reivindicación 1, en el que los medios de identificación determinan si la aeronave detectada tiene las características conocidas primera y segunda en las localizaciones conocidas del acuerdo con si Vi/ (Vi+V0) >T, donde:
Vi= el número de pulsos de luz reflejado desde el volumen interior;
V0 = el número de pulsos de luz reflejado desde el volumen exterior; y
T = un valor de umbral predeterminado.
4. El sistema de la reivindicación 3, en el que T = 0, 7.
5. El sistema de la reivindicación 1, en el que los medios de identificación controlan los medios de proyección para proyectar pulsos de luz en el volumen interior y el volumen exterior.
6. Métodos para determinar si una aeronave detectada es una aeronave conocida, teniendo la aeronave conocida un perfil conocido y teniendo también características conocidas primera y segunda en localizaciones conocidas, comprendiendo el método:
a. proyectar pulsos de luz sobre la aeronave detectada,
b. recoger pulsos de luz reflejados desde la aeronave detectada y detectar una forma de la aeronave detectada de acuerdo con los pulsos de luz,
c. comparar la forma detectada con un perfil que corresponde a la forma conocida y determinar si la forma detectada corresponde a la forma conocida, y
d. identificar si la aeronave detectada es la aeronave conocida determinando si la aeronave detectada tiene las
características conocidas primera y segunda en las localizaciones conocidas;
en el que, para la aeronave conocida, se define un volumen interior para cada una de las características conocidas primera y segunda para contener la respectiva característica conocida, y se define un volumen exterior para cada una de las características conocidas primera y segunda para no contener la respectiva característica conocida;
en el que dicho paso de identificación comprende determinar si la aeronave detectada tiene las características conocidas primera y segunda en las localizaciones conocidas de acuerdo con la determinación de un cociente de un número de pulsos de luz reflejados desde dentro del volumen interior con respecto a un número de pulsos de luz reflejados desde dentro del volumen exterior e interior;
caracterizado el sistema porque:
la identificación de la aeronave detectada es por lo menos un proceso de coincidencia de perfil de dos pasos, en el que un primer paso de coincidencia de perfil se realiza sobre dicha primera característica conocida para la aeronave detectada, tal como una forma como la nariz de la aeronave detectada, y en el que un segundo paso de coincidencia de perfil se realiza sobre dicha segunda característica conocida para la aeronave detectada, tal como un componente adicional de la aeronave detectada que es diferente de la primera característica conocida.
7. El método de la reivindicación 6, en el que se define que el volumen exterior rodea el volumen interior.
8. El método de la reivindicación 6, en el que dicho paso de identificación comprende determinar si la aeronave detectada tiene las características conocidas primera y segunda en las localizaciones conocidas del acuerdo con si Vi/ (Vi+V0) >T, donde:
Vi= el número de pulsos de luz reflejado desde el volumen interior; V0 = el número de pulsos de luz reflejado desde el volumen exterior; y T = un valor de umbral predeterminado.
9. El método de la reivindicación 8, en el que T = 0, 7.
10. El método de la reivindicación 6, en el que dicho paso de identificación comprende controlar dicho paso de proyección para proyectar pulsos de luz en el volumen interior y el volumen exterior.
Patentes similares o relacionadas:
Procedimiento para la detección y localización de un garaje y vehículo, del 6 de Mayo de 2020, de AUDI AG: Procedimiento para la detección y localización de al menos un garaje que ofrezca una plaza de aparcamiento para un vehículo en el vehículo , en donde el vehículo […]
Generador de imágenes y telémetro combinados, del 12 de Febrero de 2020, de Rafael Advanced Defense Systems Ltd: Un vehículo que comprende un generador de imágenes y un telémetro combinados (10A, 10B) que se montan en el vehículo, el generador de imágenes […]
Método para procesar pulsos de eco de un sensor láser 3d activo para proporcionar mediciones de distancia, del 24 de Julio de 2019, de HENSOLDT Sensors GmbH: Un método para procesar pulsos de eco de un sensor 3D activo para proporcionar mediciones de distancia del entorno frente al sensor, que comprende las siguientes […]
Sistema de seguimiento dinámico y método de guiado automático basado en cámaras 3D de tiempo de vuelo, del 3 de Abril de 2019, de Terabee S.A.S: Un sistema [Fig. 1, ] de seguimiento dinámico que comprende: - una cámara [Fig. 1, ] tridimensional basada en tecnología de tiempo […]
 Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Procedimiento y disposición para desarrollar un modelo tridimensional de un entorno, del 13 de Diciembre de 2018, de Vricon Systems Aktiebolag: Procedimiento para desarrollar un modelo 3D de un entorno, que comprende las etapas de: proporcionar una pluralidad de imágenes superpuestas del entorno […]
Luna con campo sensor ópticamente transparente, del 1 de Junio de 2016, de SAINT-GOBAIN GLASS FRANCE: Luna en forma de luna de parabrisas, o bien de una luna trasera de un vehículo, con un campo sensor ópticamente transparente, comprendiendo: a) al menos una […]
 Procedimiento para determinar una distancia de un objeto a un vehículo automóvil con la utilización de un sensor PMD, del 6 de Enero de 2016, de AUDI AG: Procedimiento para determinar una distancia de un objeto a un vehículo automóvil utilizando un sensor PMD , que comprende las siguientes etapas:
- en un […]
Procedimiento para determinar una distancia de un objeto a un vehículo automóvil con la utilización de un sensor PMD, del 6 de Enero de 2016, de AUDI AG: Procedimiento para determinar una distancia de un objeto a un vehículo automóvil utilizando un sensor PMD , que comprende las siguientes etapas:
- en un […]