Sistema de atraque de aeronaves y método con verificación automática de plataforma.
Un método para identificar un objeto detectado (12) y determinar si en una zona (19) cerca del objeto (12) estápresente un obstáculo,
comprendiendo el método:
(a) la proyección de un primer conjunto de pulsos luminosos sobre el objeto (12) y un segundo conjunto de pulsosluminosos en la zona (19) para generar pulsos reflejados;
(b) la recepción de los pulsos reflejados en un detector (20), caracterizada por:
(c) la identificación del objeto (12) basándose exclusivamente en los pulsos reflejados desde el primer conjunto depulsos luminosos; y
(d) la determinación de si el obstáculo está presente en la zona (19) basándose exclusivamente en los pulsosreflejados desde el segundo conjunto de pulsos luminosos
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04013069.
Solicitante: SAFEGATE INTERNATIONAL AB.
Nacionalidad solicitante: Suecia.
Dirección: DJURHAGEGATAN 19 21376 MALMO SUECIA.
Inventor/es: MILLGARD, LARS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64F1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64F INSTALACIONES EN TIERRA O INSTALACIONES EN CUBIERTA DE PORTAAVIONES ESPECIALMENTE ADAPTADAS PARA SU USO EN CONEXIÓN CON AERONAVES; DISEÑO, FABRICACIÓN, ENSAMBLAJE, LIMPIEZA, MANTENIMIENTO O REPARACIÓN DE AERONAVES, NO PREVISTOS EN OTRO LUGAR; MANIPULACIÓN, TRANSPORTE, ENSAYO O INSPECCIÓN DE COMPONENTES DE AERONAVES, NO PREVISTOS EN OTRO LUGAR. › Instalaciones en tierra o instalaciones en cubierta de portaaviones (adaptadas especialmente para aeronaves cautivas B64F 3/00).
- G01S17/66 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas de seguimiento que utilizan ondas electromagnéticas que no sean ondas de radio.
- G01S17/93 G01S 17/00 […] › como anti-colisión.
- G01S7/48 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › de sistemas de acuerdo con el grupo G01S 17/00.
- G08G5/06 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › para el control cuando el aparato está en tierra.
PDF original: ES-2402294_T3.pdf
Fragmento de la descripción:
Sistema de atraque de aeronaves y método con verificación automática de plataforma Campo de la invención La presente se dirige a sistemas de atraque de aeronaves y más en particular a mejoras de seguridad para sistemas de atraque de aeronaves para la verificación automática de la plataforma frente a obstáculos antes de y durante el atraque. La presente invención se dirige además a métodos implementados en dichos sistemas.
Descripción de la técnica relacionada En los últimos años, se ha producido un aumento significativo en el número de pasajeros, carga y otro tráfico de aeronaves, incluyendo despegues, aterrizajes y otro tráfico de aeronaves en tierra. También, se ha producido un acusado incremento en el número de vehículos de asistencia en tierra que se necesitan para descargar la carga y para proporcionar servicios de catering y mantenimiento y asistencia permanente de todas las aeronaves. Con este aumento sustancial en el tráfico en tierra ha aparecido la necesidad de un mayor control y seguridad en el atraque y la identificación de aeronaves en los aeropuertos.
Para este fin, la patente de EE.UU. nº 6.023.665, concedida el 8 de febrero de 2000, al mismo autor de la invención nombrado en la presente solicitud, divulga un sistema para la detección, identificación y atraque de aeronaves usando pulsos láser para obtener un perfil de un objeto desde la distancia. El sistema explora inicialmente la zona situada frente a la puerta hasta que encuentra e identifica un objeto. Una vez que el objeto es identificado como un avión, el sistema realiza un seguimiento del avión. Usando la información del perfil, el sistema puede visualizar en tiempo real el tipo de avión, la distancia desde el punto de parada y la posición lateral del avión. Los modos de funcionamiento del sistema incluyen un modo de captura, en que se detecta un objeto y se determina que es una aeronave, y un modo de seguimiento, en que se verifica el tipo de aeronave y se vigila el movimiento de la aeronave hacia la puerta.
En referencia a la fig. 1A, el sistema de guía de atraque de la patente mencionada anteriormente, designado en general como 10, proporciona la localización informatizada de un objeto, la verificación de la identidad del objeto y el seguimiento del objeto, siendo el objeto preferentemente una aeronave 12. En funcionamiento, una vez que la torre de control 14 registra el aterrizaje de una aeronave 12, informa al sistema de que la aeronave se está acercando a una puerta 16 y del tipo de aeronave (es decir, 747, L- 10 11, etc.) esperado. El sistema 10 realiza entonces un barrido de la zona 19 situada delante de la puerta 16 hasta que localiza un objeto que identifica como un avión 12. El sistema 10 compara a continuación el perfil de la aeronave 12 medido con un perfil de referencia para el tipo de aeronave esperado y valora otros criterios geométricos característicos del tipo de aeronave esperado. Si la aeronave localizada, a una distancia mínima especificada (por ejemplo, 12 m) antes de la posición de parada, no se corresponde con el perfil esperado y los otros criterios, el sistema informa o envía una señal a la torre 14, visualiza un aviso de parada y suspende la operación.
Si el objeto es la aeronave 12 esperada, el sistema 10 realiza un seguimiento de la misma en la puerta 16 mostrando visualmente en tiempo real al piloto la distancia que queda hasta el punto de parada apropiado y la posición lateral del avión 12. La posición lateral del avión 12 se proporciona en una pantalla 18 que permite al piloto corregir la posición del avión para aproximarse a la puerta 16 desde el ángulo correcto. Una vez que el avión 12 está en su punto de parada, esta circunstancia se muestra en la pantalla 18 y el piloto detiene el avión.
En referencia a la fig. 1B, el sistema 10 incluye a Telémetro Láser (TL) 20, dos espejos 21, 22, una unidad de visualización 18, dos motores paso a paso 24, 25, y un microprocesador 26. Los productos de TL adecuados son comercializados por Laser Atlanta Corporation y son capaces de emitir pulsos láser, de recibir los reflejos de esos pulsos reflejados en objetos distantes y de calcular la distancia a esos objetos.
El sistema 10 está dispuesto de manera que existe una conexión 28 entre el puerto en serie del TL 20 y el microprocesador 26. A través de esa conexión, el TL 20 envía datos de medida aproximadamente cada 1/400ª de segundo al microprocesador 26. Los componentes de hardware designados generalmente por 23 del sistema 20 están controlados por el microprocesador 26 programado. Además, el microprocesador 26 suministra datos a la pantalla 18. Como interfaz con el piloto, la unidad de visualización 18 se coloca encima de la puerta 16 para mostrar al piloto la distancia del avión a su punto de parada 29, el tipo de aeronave 30 que el sistema cree que se está acercando y la localización lateral del avión. Usando esta pantalla, el piloto puede ajustar la aproximación del avión 12 a la puerta 16 para garantizar que el avión está en el ángulo correcto para acceder a la puerta. Si la pantalla 18 muestra un tipo de aeronave 30 erróneo, el piloto puede interrumpir la aproximación antes de que se produzcan daños. Este doble control garantiza la seguridad de los pasajeros, el avión y las instalaciones aeroportuarias dado que si el sistema intenta el atraque de un gran 747 en una puerta en la que se espera un 737, probablemente se producirán daños importantes.
Además de la pantalla 18, el microprocesador 26 procesa los datos del TL 20 y controla la dirección del láser 20 a través de su conexión 32 con los motores paso a paso 24, 25. Los motores paso a paso 24, 25 están conectados con los espejos 21, 22 y los mueven como respuesta a instrucciones del microprocesador 26. Así, al controlar los motores paso a paso 24, 25, el microprocesador 26 puede modificar el ángulo de los espejos 21, 22 y dirigir los pulsos láser desde el TL 20.
Los espejos 21, 22 dirigen el láser reflejando los pulsos láser hacia el exterior por encima de la plataforma del aeropuerto. En la forma de realización preferida, el TL 20 no se mueve. El barrido por el láser se realiza con espejos. Un espejo 22 controla el ángulo horizontal del láser, mientras que el otro espejo 21 controla el ángulo vertical. Al activar los motores paso a paso 24, 25, el microprocesador 26 controla el ángulo de los espejos y así la dirección del pulso láser.
El sistema 10 controla el espejo horizontal 22 para conseguir un barrido horizontal continuo en un ángulo de ±10 grados ángulo en pasos angulares de aproximadamente 0, 1 grados que son equivalentes a 16 micropasos por paso con el motor paso a paso Escap EDM-453. Se toma un paso angular para cada respuesta de la unidad de lectura, es decir, aproximadamente cada 2, 5 ms. El espejo vertical 21 puede controlarse para conseguir un barrido vertical entre +20 y -30 grados en pasos angulares de aproximadamente 0, 1 grados con un paso cada 2, 5 ms. El espejo vertical se usa para barrido vertical cuando se está determinando la altura del morro y cuando la aeronave 12 está siendo identificada. Durante el modo de seguimiento, el espejo vertical 21 se ajusta continuamente para mantener el seguimiento de barrido horizontal del extremo del morro de la aeronave 12.
Aunque el sistema desvelado en la patente mencionada anteriormente detecta el avión, este sistema no detecta los vehículos de asistencia en tierra u otros objetos en la plataforma de la zona de atraque. Debido al limitado campo de visión del piloto, la aeronave puede colisionar con dichos vehículos de asistencia en tierra u otros objetos. Además, el sistema puede proporcionar avisos erróneos en caso de niebla o nieve, sobre todo en el primero.
Con la máxima frecuencia, la niebla es vista por el sistema a entre 10 y 25 m. Cuando esta distancia es más cercana a, o está en la zona de, la posición de parada, el sistema generará una condición de puerta bloqueada o error de identificación si el procedimiento de captura se activa en la niebla. El procedimiento de captura necesita un método para reconocer que el objeto capturado es muy probablemente niebla y no supone una obstrucción en el procedimiento de atraque una vez que aparece la aeronave.
Los registros tomados durante condiciones de niebla muestran que la niebla se comunica como un objeto sólido delante del sistema. Un barrido en la niebla comunica a menudo cerca del 100% de ecos, y los ecos varían en distancia sólo unos decímetros entre sí. Con la máxima frecuencia, los copos de nieve están más separados y proporcionan ecos del 60-80% con una extensión de 5 a 10 m. Así, en general la nieve es más fácil de detectar, es decir, de diferenciar de un objeto sólido, que la niebla. Las fig. 2A y 2B muestran imágenes... [Seguir leyendo]
Reivindicaciones:
1. Un método para identificar un objeto detectado (12) y determinar si en una zona (19) cerca del objeto (12) está presente un obstáculo, comprendiendo el método:
(a) la proyección de un primer conjunto de pulsos luminosos sobre el objeto (12) y un segundo conjunto de pulsos luminosos en la zona (19) para generar pulsos reflejados;
(b) la recepción de los pulsos reflejados en un detector (20) , caracterizada por:
(c) la identificación del objeto (12) basándose exclusivamente en los pulsos reflejados desde el primer conjunto de pulsos luminosos; y
(d) la determinación de si el obstáculo está presente en la zona (19) basándose exclusivamente en los pulsos reflejados desde el segundo conjunto de pulsos luminosos.
2. El método según la reivindicación 1, en el que, durante la etapa (a) , los conjuntos de pulsos luminosos primero y segundo son proyectados en alternancia.
3. El método según la reivindicación 1, en el que:
el segundo conjunto de pulsos luminosos es proyectado en la zona (19) una pluralidad de veces para producir al menos conjuntos primero y segundo de pulsos reflejados desde la zona (19) ; y
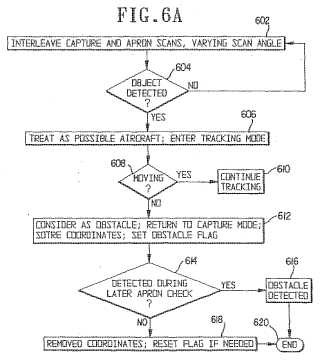
si se detecta el obstáculo en el primer conjunto de pulsos reflejados, se usa el segundo conjunto de pulsos reflejados para determinar si el obstáculo está en movimiento.
4. El método según la reivindicación 3, en el que, si se determina que el obstáculo no está en movimiento, el segundo conjunto de pulsos luminosos es proyectado de nuevo en la zona (19) para producir al menos un tercer conjunto de pulsos reflejados, y la etapa (d) comprende la determinación a partir del tercer conjunto de pulsos reflejados de si el obstáculo está todavía presente.
5. El método según la reivindicación 1, en el que el segundo conjunto de pulsos luminosos comprende pulsos luminosos dirigidos según una pluralidad de ángulos verticales.
6. El método según la reivindicación 1, en el que, durante la etapa (d) , se ignoran los pulsos reflejados desde debajo de un cierto nivel (g) por encima del suelo.
7. El método según la reivindicación 1, que comprende además, después de que se identifica el objeto (12) :
(e) el seguimiento del objeto (12) cuando el objeto (12) se desplaza hacia una puerta (16) ; y
la continuación de las etapas (a) , (b) y (d) durante la etapa (e) para detectar el obstáculo cuando el objeto (12) se desplaza hacia la puerta (16) .
8. El método según la reivindicación 1, en el que: el objeto es una aeronave (12) ; y la zona (19) está en una plataforma de la aeronave (12) .
9. El método según la reivindicación 8, en el que el obstáculo que se detectará es un obstáculo que provocaría daños en la aeronave (12) si la aeronave (12) choca con el obstáculo.
10. El método según la reivindicación 9, en el que el obstáculo que se detectará es un vehículo de servicio terrestre para dar servicio a la aeronave (12) .
11. Un sistema para identificar un objeto detectado y determinar si en una zona (19) cerca del objeto (12) está
presente un obstáculo, comprendiendo el sistema: una fuente luminosa (20) para proyectar un primer conjunto de pulsos luminosos sobre el objeto (12) y un segundo conjunto de pulsos luminosos en la zona (19) para generar pulsos reflejados,
un detector (20) para recibir el primer conjunto de pulsos reflejados; estando el sistema caracterizado por:
un dispositivo informático (26) para identificar el objeto (12) basándose exclusivamente en los pulsos reflejados desde el primer conjunto de pulsos luminosos y para determinar si el obstáculo está presente en la zona (19) basándose exclusivamente en los pulsos reflejados desde el segundo conjunto de pulsos luminosos.
12. El sistema según la reivindicación 11, en el que la fuente luminosa (20) proyecta los conjuntos de pulsos luminosos primero y segundo en alternancia.
13. El sistema según la reivindicación 11, en el que:
el segundo conjunto de pulsos luminosos es proyectado en la zona (19) una pluralidad de veces para producir al menos los conjuntos primero y segundo de pulsos reflejados desde la zona (19) ; y
si se detecta el obstáculo en el primer conjunto de pulsos reflejados, se usa el segundo conjunto de pulsos reflejados para determinar si el obstáculo está en movimiento.
14. El sistema según la reivindicación 13, en el que, si se determina que el obstáculo no está en movimiento, el segundo conjunto de pulsos luminosos es proyectado de nuevo en la zona (19) para producir al menos un tercer conjunto de pulsos reflejados, y el dispositivo informático (26) determina a partir del tercer conjunto de pulsos reflejados si el obstáculo está todavía presente.
15. El sistema según la reivindicación 11, en el que el segundo conjunto de pulsos luminosos comprende pulsos luminosos dirigidos por la fuente luminosa (20) a una pluralidad de ángulos verticales.
16. El sistema según la reivindicación 11, en el que el dispositivo informático (26) ignora los pulsos reflejados desde debajo de un cierto nivel (g) por encima del suelo para determinar si el obstáculo está presente.
17. El sistema según la reivindicación 11, en el que, después de que se identifica el objeto (12) , el dispositivo informático (26) realiza un seguimiento del objeto (12) cuando el objeto (12) se desplaza hacia una puerta (16) , y la fuente luminosa (20) , el detector (20) y el dispositivo informático (26) funcionan mientras el objeto (12) se desplaza hacia la puerta (16) para detectar el obstáculo cuando el objeto (12) se desplaza hacia la puerta (16) .
Patentes similares o relacionadas:
Método de reconstrucción de imágenes basado en modelo, del 6 de Mayo de 2020, de ECOLE POLYTECHNIQUE FEDERALE DE LAUSANNE (EPFL): Un método de reconstrucción de imágenes de ondas de pulso que comprende: • transmitir un conjunto de ondas de pulso a un objeto […]
Procedimiento para la detección y localización de un garaje y vehículo, del 6 de Mayo de 2020, de AUDI AG: Procedimiento para la detección y localización de al menos un garaje que ofrezca una plaza de aparcamiento para un vehículo en el vehículo , en donde el vehículo […]
Sistema y método de alerta de amenaza de láser, del 4 de Marzo de 2020, de ELBIT SYSTEMS LTD.: Un sistema de alerta de amenaza de láser, configurado para detectar la presencia de una radiación de láser transmitida por una fuente […]
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores, del 2 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de […]
Sensor para detectar y localizar fuentes de radiación láser, del 17 de Julio de 2019, de HENSOLDT Sensors GmbH: Sensor para detectar y localizar fuentes de radiación láser con - un detector sensible a la radiación dispuesto en el campo de la imagen de una óptica […]
Aparato y método para determinar elementos de referencia de un entorno, del 12 de Junio de 2019, de BALYO: Un método para determinar elementos de referencia de un entorno para asociar un mapa predeterminado con un mapa del entorno en tiempo real, comprendiendo el método […]
Procedimiento para la detección de radiación láser pulsada, así como avisador de láser productor de imágenes, del 15 de Mayo de 2019, de HENSOLDT Sensors GmbH: Procedimiento para la detección de radiación láser pulsada con resolución bidimensional de la dirección de incidencia, caracterizado […]
Conjunto de sensores ópticos, del 11 de Marzo de 2019, de HENSOLDT Sensors GmbH: Conjunto de sensores ópticos que comprende varios sensores (D1, D2) para la detección de ondas electromagnéticas y una abertura común asignada a los sensores (D1, D2), previéndose […]