Sistema antisonido para sistemas de escape y procedimiento para el control del mismo.
Procedimiento para el control de un sistema antisonido para un sistema de escape de un vehículo accionado porun motor de combustión,
para generar un sonido transportado por el aire en el sistema de escape por medio de unsonido medido, a efectos de cancelar, por lo menos parcialmente y preferentemente de forma completa, el sonidotransportado por el aire generado por el motor de combustión y conducido en el sistema de escape en la zona de lalocalización del sistema de escape, en el que el sonido es medido, comprendiendo las siguientes etapas:
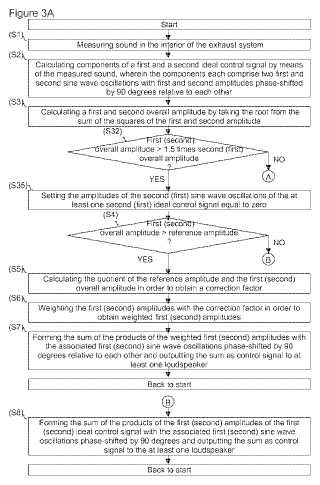
(S1) medición del sonido en el interior del sistema de escape;
(S2) cálculo de componentes de la primera señal de control idealpor medio del sonido medido, en el que los componentes comprenden dos primeras oscilaciones de onda senoidalcon primeras amplitudes desplazadas de fase en 90 grados entre sí;
(S3) cálculo de una primera amplitud global a partir delas primeras amplitudes;
(S4) comparación de la primera amplitud global con una amplitud
de referencia predeterminada a efectos de determinar si la primera amplitud global es superior que la amplitud dereferencia;
(S5) calcular un factor de corrección a partir de la amplitud de la referenciay la primera amplitud global si la primera amplitud global es superior a la amplitud de referencia;(S6) ponderar las primeras amplitudes con el
factor de corrección, a efectos de obtener primeras amplitudes ponderadas, si la primera amplitud global es superiora la amplitud de referencia; y
(S7) formar la suma de los productosde las primeras amplitudes ponderadas con las primeras oscilaciones de onda senoidal asociadas desplazadas enfase en 90 grados unas con respecto a otras y enviar la suma como señal de control, como mínimo a un altavoz, sila primera amplitud global es superior a la amplitud de referencia; o bien
(S8) formar la suma de los productos de las primeras
amplitudes de la primera señal de control ideal con las primeras oscilaciones de onda senoidal asociadasdesplazadas en fase en 90 grados y enviar la suma como señal de control al, como mínimo un altavoz, si la primeraamplitud global es menor o igual que la amplitud de referencia.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12174453.
Solicitante: Eberspächer Exhaust Technology GmbH & Co. KG.
Nacionalidad solicitante: Alemania.
Dirección: Homburger Strasse 95 66539 Neunkirchen ALEMANIA.
Inventor/es: LÜCKING,CHRISTOF, MENGEL,ANDRE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F01N1/06 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F01 MAQUINAS O MOTORES EN GENERAL; PLANTAS MOTRICES EN GENERAL; MAQUINAS DE VAPOR. › F01N SILENCIADORES O DISPOSITIVOS DE ESCAPE PARA MAQUINAS O MOTORES EN GENERAL; SILENCIADORES O DISPOSITIVOS DE ESCAPE PARA MOTORES DE COMBUSTION INTERNA (disposiciones de conjuntos de propulsión relativas al escape de gases B60K 13/00; silenciadores de admisión de aire especialmente adaptados para motores de combustión interna, o con dispositivos para estos motores F02M 35/00; protección contra ruidos en general o amortiguamiento de los mismos G10K 11/16). › F01N 1/00 Silenciadores caracterizados por su principio de funcionamiento. › utilizando los efectos de interferencia.
- F01N9/00 F01N […] › Control eléctrico de los aparatos de tratamiento de los gases de escape (dispositivos de control o diagnóstico para los aparatos de tratamiento de gases de escape F01N 11/00; control eléctrico simultáneo de varias funciones de los motores de combustión F02D 43/00).
- G10K11/178 FISICA. › G10 INSTRUMENTOS MUSICALES; ACUSTICA. › G10K DISPOSITIVOS GENERADORES DE SONIDOS (juguetes musicales o sonoros A63H 5/00 ); METODOS O DISPOSITIVOS PARA PROTEGER CONTRA, O PARA AMORTIGUAR, RUIDO U OTRAS ONDAS ACUSTICAS EN GENERAL; ACUSTICA NO PREVISTA EN OTRO LUGAR. › G10K 11/00 Métodos o dispositivos para transmitir, conducir o dirigir el sonido en general; Métodos o dispositivos de protección contra el ruido u otras ondas acústicas en general, o para amortiguarlas. › por regeneración electroacústica en antifase de las ondas acústicas originales.
PDF original: ES-2431540_T3.pdf
Fragmento de la descripción:
Sistema antisonido para sistemas de escape y procedimiento para el control del mismo.
La presente invención se refiere a un sistema antisonido para sistemas de escape y a un procedimiento para el control del mismo. En particular, la presente invención se refiere a una cancelación activa o modificación de las ondas sonoras en los sistemas de escape de vehículos accionados por motores de combustión interna.
Con independencia del diseño de un motor de combustión interna (por ejemplo, motor de émbolos alternativos, motor de émbolos rotativos o motor de pistones libres) , se generan ruidos como consecuencia de los ciclos de trabajo (en particular la aspiración y compresión de una mezcla combustible-aire, ciclo de trabajo y expulsión de la mezcla combustible-aire quemada) , que tienen lugar de manera sucesiva. Por una parte, estos ruidos pasan a través del motor de combustión como sonido transportado por la estructura y es radiado hacia fuera del motor de combustión como sonido transportado por el aire. Por otra parte, los ruidos pasan a través del sistema de escape del motor de combustión como sonido transportado por el aire junto con la mezcla combustible-aire quemada.
Estos ruidos son percibidos frecuentemente como desventajosos. Por una parte, existen disposiciones legales con respecto a la protección contra ruidos, que tienen que ser cumplidas por los fabricantes de los vehículos accionados por motores de combustión. Estas disposiciones legales estipulan normalmente una carga de sonido permisible máxima durante el funcionamiento del vehículo. Por otra parte, los fabricantes intentan impartir un desarrollo de sonido característico a los vehículos producidos por ellos y accionados con motores de combustión que se adecuen a la imagen del respectivo fabricante y están destinados a atraer a los clientes. Este desarrollo característico del ruido no se puede asegurar en muchos casos de manera natural en los motores modernos con bajo cubicaje.
Los ruidos que pasan a través de la estructura del motor de combustión se pueden aislar bien y por lo tanto no constituyen problema alguno con respecto a la protección contra ruidos, de forma normal.
Los ruidos que pasan a través del sistema de escape del motor de combustión en forma de sonido transportado por el aire junto con la mezcla aire-combustible quemada, se reducen mediante silenciadores dispuestos antes del orificio del sistema de escape, que están conectados más abajo de cualesquiera convertidores catalíticos existentes. Estos silenciadores pueden funcionar, por ejemplo, de acuerdo con el principio de absorción y/o reflexión. Ambos principios operativos tienen la desventaja de que requieren un volumen comparativamente grande y presentan una resistencia relativamente elevada a la mezcla quemada de combustible-aire, como resultado de lo cual la eficiencia global del vehículo disminuye y el consumo de combustible aumenta.
Como alternativa o de forma adicional a los silenciadores, se han desarrollado durante un tiempo unos llamados sistemas antisonido que superponen un antisonido generado de manera electroacústica al sonido transportado por el aire generado en el motor de combustión y conducido en el sistema de escape. Estos sistemas son conocidos, por ejemplo, por los documentos US 4.177.874, US 5.229.556, US 5.233.137, US 5.343.533, US 5.336.856, US 5.432.857, US 5.600.106, US 5.619.020, EP 0 373 188, EP 0 674 097, EP 0 755 045, EP 0 916 817 EP 1 055 804, EP`1 627 996, DE 1 957 51 596, DE 10 2006 042 224, DE 10 2008 018 085, DE 10 2009 031 848 y US 4677676.
Estos sistemas antisonido utilizan habitualmente un algoritmo llamado de media de Cuadrados Mínimos Filtrado x (Filtered-x least mean squares (FxLMS) ) , que intenta regular una señal de error medido por medio de un micrófono a cero emitiendo sonido a través de un altavoz conectado fluídicamente al sistema de escape (es decir, un fluido (gas/aire) dentro del altavoz comunica con el fluido (gas/aire) dentro del sistema de escape; el fluido dentro del altavoz puede fluir hacia el interior del sistema de escape y viceversa) . Para conseguir una interferencia destructiva de las ondas del sonido transportado por el aire conducido en el sistema de escape y del antisonido generado por el altavoz, las ondas sonoras que se originan a partir del altavoz tienen que corresponder en amplitud y frecuencia a las ondas de sonido conducidas en el sistema de escape, pero tienen un desplazamiento de fase de 180 grados con respecto a este último. Para cada banda de frecuencia del sonido transportado por el aire conducido en el conducto de escape, el antisonido es calculado separadamente por medio del algoritmo FxLMS en el que se determina una frecuencia y posición de fase adecuadas de dos oscilaciones senoidales desplazadas en 90 grados, una con respecto a la otra, y se calcula la amplitud para estas oscilaciones de ondas senoidales. El objetivo de los sistemas anti-sonoros es que la cancelación del sonido es audible y medible en el exterior, pero en caso necesario también dentro del sistema de escape.
Un sistema antisonido correspondiente puede ser obtenido de la empresa J. Eberspächer GmbH & Co. KG, Eberspächertrasse 24, 73730 Esslingen, Deutschland (Alemania) .
Con la utilización de un sistema anti-sonoro, el volumen de construcción del sistema de escape se puede reducir hasta 60%, el peso hasta 40% y la contrapresión del escape hasta unos 150 mbar en comparación con sistemas convencionales de escape sin sistema antirruido. Naturalmente, los sistemas antisonido se pueden combinar con silenciadores convencionales en el sistema de escape.
La designación “antisonido” sirve para la distinción entre el sonido transportado por el aire conducido en el sistema de escape. Considerado en sí mismo, el “antisonido” es un sonido convencional transportado por el aire.
Con sistemas antisonido conocidos y los procedimientos para el control de los mismos es desventajoso que se pueda producir la sobrecarga de, como mínimo, un altavoz.
Por lo tanto, es un objetivo de la presente invención el reconocer un sistema antisonido para sistemas de escape y un procedimiento para el control del mismo que evite de manera efectiva la sobrecarga de, como mínimo, un altavoz.
El objetivo anterior es solucionado por la combinación de características de las reivindicaciones independientes. Otras realizaciones preferentes se encuentran en las reivindicaciones dependientes.
Las realizaciones se refieren a un procedimiento para el control de un sistema antisonido para un sistema de escape de un vehículo accionado por un motor de combustión interna, para generar un sonido transportado en el aire en el sistema de escape por medio de sonido medido, a efectos de cancelar, por lo menos parcialmente, y preferentemente de forma completa, el sonido transportado por el aire generado en un motor de combustión y conducido en el sistema de escape en la zona de la localización del sistema de escape en el que se mide el sonido. Esta cancelación del sonido debe ser audible y medible por lo menos fuera del sistema de escape, pero preferiblemente también dentro del sistema de escape. Los términos “en la zona de la localización del sistema de escape en el que se mide el sonido” significan en el presente caso que la localización en la que el sonido es cancelado, por lo menos parcialmente, está separada a lo largo del flujo de gases de escape con respecto al flujo de gases de escape más abajo o más arriba en no más de diez veces y en particular no más de cinco veces y más particularmente no más del doble del diámetro máximo del sistema de escape en la localización en la que se efectúa la medición de sonido. En una primera etapa, la medición del sonido tiene lugar en el interior del sistema de escape. Después de esto, los componentes de una primera señal de control ideal son calculados por medio del sonido medido, de manera que las componentes comprenden dos primeras oscilaciones senoidales con primeras amplitudes desplazadas en fase entre sí en 90 grados. Ello es seguido por el cálculo de una primera amplitud general a partir de las primeras amplitudes, lo cual es seguido por una comparación de la primera amplitud general con una predeterminada referencia de amplitud a efectos de establecer si la primera amplitud general es superior a la amplitud de referencia.
En el caso de que la primera amplitud general sea superior a la amplitud de referencia, se llega a la conclusión de que no se pueden excluir daños producidos en el altavoz que se alimenta con la señal ideal de control. Por esta razón se calcula un factor de corrección a partir de la amplitud de referencia y de la primera amplitud general, con el que se pueden ponderar las primeras amplitudes,... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el control de un sistema antisonido para un sistema de escape de un vehículo accionado por un motor de combustión, para generar un sonido transportado por el aire en el sistema de escape por medio de un sonido medido, a efectos de cancelar, por lo menos parcialmente y preferentemente de forma completa, el sonido transportado por el aire generado por el motor de combustión y conducido en el sistema de escape en la zona de la localización del sistema de escape, en el que el sonido es medido, comprendiendo las siguientes etapas:
(S1) medición del sonido en el interior del sistema de escape; (S2) cálculo de componentes de la primera señal de control ideal por medio del sonido medido, en el que los componentes comprenden dos primeras oscilaciones de onda senoidal con primeras amplitudes desplazadas de fase en 90 grados entre sí; (S3) cálculo de una primera amplitud global a partir de las primeras amplitudes; (S4) comparación de la primera amplitud global con una amplitud de referencia predeterminada a efectos de determinar si la primera amplitud global es superior que la amplitud de referencia; (S5) calcular un factor de corrección a partir de la amplitud de la referencia y la primera amplitud global si la primera amplitud global es superior a la amplitud de referencia; (S6) ponderar las primeras amplitudes con el factor de corrección, a efectos de obtener primeras amplitudes ponderadas, si la primera amplitud global es superior a la amplitud de referencia; y (S7) formar la suma de los productos de las primeras amplitudes ponderadas con las primeras oscilaciones de onda senoidal asociadas desplazadas en fase en 90 grados unas con respecto a otras y enviar la suma como señal de control, como mínimo a un altavoz, si la primera amplitud global es superior a la amplitud de referencia; o bien (S8) formar la suma de los productos de las primeras amplitudes de la primera señal de control ideal con las primeras oscilaciones de onda senoidal asociadas desplazadas en fase en 90 grados y enviar la suma como señal de control al, como mínimo un altavoz, si la primera amplitud global es menor o igual que la amplitud de referencia.
2. Procedimiento, según la reivindicación 1, en el que la etapa (S3) de cálculo de la primera amplitud global a partir de las primeras amplitudes, comprende la realización de la raíz cuadrada a partir de la suma de los cuadrados de las primeras amplitudes, a efectos de obtener la primera amplitud global.
3. Procedimiento, según la reivindicación 1 ó 2, en el que la etapa (S5) de calcular el factor de corrección a partir de la amplitud de referencia y la primera amplitud global, comprende el cálculo del cociente de la amplitud de referencia y de la primera amplitud global, a efectos de obtener el factor de corrección.
4. Procedimiento, según cualquiera de las reivindicaciones 1, 2 ó 3, en el que la etapa (S2) de cálculo de los componentes de la primera señal de control ideal, comprende el cálculo de, como mínimo, una segunda señal de control ideal que comprende segundas oscilaciones de ondas senoidales, que comprenden segundas amplitudes desplazadas en fase en 90 grados, una con respecto a otra, de manera que la frecuencia de las dos primeras oscilaciones de onda senoidales de la primera señal de control ideal desplazadas en fase en 90 grados, una con respecto a otra, difiere de la frecuencia de las segundas oscilaciones de onda senoidales de la segunda señal de control ideal desplazadas en fase en 90 grados una con respecto a otra;
en el que la etapa (S3) de cálculo de la primera amplitud global, a partir de las primeras amplitudes, comprende el cálculo de una segunda amplitud global a partir de las segundas amplitudes; y
en el que el procedimiento antes de la etapa (S4) de comparación de la primera amplitud global con la amplitud de referencia predeterminada, comprende adicionalmente la siguiente etapa:
(S32) comparar la primera y segunda amplitudes globales entre sí; y (S35) ajustar las amplitudes de las segundas oscilaciones de onda senoidal de la, como mínimo, una segunda señal de control ideal igual a cero, si la primera amplitud global es más de 1, 5 veces el tamaño y, en particular, más de 2 veces el tamaño y de manera específica más de 5 veces el tamaño de la segunda amplitud global o ajustando las amplitudes de la primera oscilación de onda senoidal de la primera señal de control ideal igual a cero, si la segunda amplitud global es más de 1, 5 veces las dimensiones y, en particular, más de 2 veces y de manera más específica más de 5 veces las dimensiones de la primera amplitud global.
5. Procedimiento, según la reivindicación 4, en el que la etapa (S3) de cálculo de la primera amplitud global a partir de las primeras amplitudes y calcular la segunda amplitud global, a partir de las segundas amplitudes, comprende obtener la raíz cuadrada de la suma de los cuadrados de la primera y segunda amplitudes respectivamente, a efectos de obtener la primera y segunda amplitudes globales.
6. Procedimiento para controlar un sistema antisonido para sistemas de escape de un vehículo accionado por un motor de combustión interna, a efectos de cancelar, por lo menos, parcialmente y preferentemente de forma completa, el sonido conducido por el aire generado por un motor de combustión interna y conducido en el sistema de escape en la zona de la localización en el sistema de escape, en la que se mide el sonido, comprendiendo las siguientes etapas:
(S1*) medido el sonido en el interior de un sistema de escape; (S2*) calcular los componentes de una primera y, como mínimo una segunda señal de control ideal para generar un sonido antisonido transportado por el aire en el sistema de escape por medio del sonido medido, en el que los componentes comprenden en cada caso dos primeras y segundas oscilaciones de ondas sinoidales que comprenden primeras y segundas amplitudes desplazadas en fase en 90 grados entre sí, de manera que la frecuencia de las dos primeras oscilaciones de onda sinoidal de la primera señal de control ideal desplazada en fase 90 grados, difiere de la frecuencia de las dos segundas oscilaciones de onda senoidal de la segunda señal de control ideal desplazadas en fase en 90 grados; (S3*) calcular una primera amplitud global a partir de las primeras amplitudes y una segunda amplitud global a partir de las segundas amplitudes; (S35*) añadir los valores absolutos de las primera y segunda amplitudes globales para formar una amplitud global absoluta; (S4*) comparar la amplitud global absoluta con una amplitud de referencia predeterminada a efectos de determinar si la amplitud global absoluta es mayor que la amplitud de referencia; (S5*) calcular un factor de corrección absoluto a partir de la amplitud de referencia y la amplitud global absoluta, si la amplitud global absoluta es superior a la amplitud de referencia; (S6*) ponderar la primera y segunda amplitudes con el factor de corrección absoluta a efectos de obtener primeras y segundas amplitudes ponderadas, si la amplitud global absoluta es superior a la amplitud de referencia; y (S7*) formar las sumas de los productos de las primeras y segundas amplitudes ponderadas con las primeras y segundas oscilaciones de ondas senoidales asociadas desplazadas en fase en 90 grados y enviando las sumas como señal de control a, como mínimo, un altavoz, si la amplitud global absoluta es superior a la amplitud de referencia; o bien (S8*) formar las sumas de los productos de la primera y segundas amplitudes de la primera y segunda señales de control ideal con las primeras y segundas oscilaciones senoidales asociadas desplazadas en fase en 90 grados y enviando las sumas como señal de control al, como mínimo, un altavoz, si la amplitud global absoluta es menor o igual que la amplitud de referencia.
7. Procedimiento, según la reivindicación 6, en el que la etapa (S5*) de cálculo del factor de corrección absoluto a partir de la amplitud de referencia y la amplitud global absoluta, comprende la formación del cociente de la amplitud de referencia y la amplitud global absoluta a efectos de obtener el factor de corrección absoluto.
8. Procedimiento, para el control de un sistema antisonido para sistemas de escape de un vehículo accionado por un motor de combustión interna, a efectos de cancelar, por lo menos parcialmente y preferentemente de forma completa el sonido transportado por el aire generado por un motor de combustión interna y conducido en el sistema de escape en la región de la localización en el sistema de escape en la que se ha medido el sonido, comprendiendo las siguientes etapas:
(S1~) medir el sonido en el interior de un sistema de escape; (S2~) calcular los componentes de una primera y, como mínimo, una segunda señal de control ideal para generar un sonido antisonido transportado por el aire en el sistema de escape por medio del sonido medido, en el que los componentes comprenden en cada caso dos primeras y segundas oscilaciones de onda senoidales comprendiendo primeras y segundas amplitudes en fase en 90 grados entre sí, de manera que la frecuencia de las dos primeras oscilaciones de onda senoidales de la primera señal de control ideal desplazada en fase en 90 grados difiere de la frecuencia de las segundas oscilaciones de ondas senoidales de la segunda señal de control ideal desplazada en fase en 90 grados; (S25~) determinar un desplazamiento en fase de corriente entre los componentes de la primera señal de control ideal y los componentes de, como mínimo, una segunda señal de control ideal; (S3~) calcular una primera amplitud global a partir de las primeras amplitudes y, como mínimo, otra amplitud global a partir de las segundas amplitudes; (S35~) añadir los valores absolutos de la primera amplitud global y de, como mínimo, otra amplitud global teniendo en cuenta el desplazamiento de fase a través de la adición de vector para formar una amplitud global de corriente; (S4~) comparar la amplitud global de corriente con una amplitud de referencia predeterminada a efectos de determinar si la amplitud global de corriente es superior que la amplitud de referencia; (S5~) calcular un factor de corrección de corriente a partir de la amplitud de referencia y de la amplitud global de corriente, si la amplitud global de corriente es superior a la amplitud de referencia; (S6~) ponderar la primera y segunda amplitudes con el factor de corrección de corriente, a efectos de obtener primeras y segundas amplitudes ponderadas si la amplitud global de corriente es superior que la amplitud de referencia; y (S7~) formar las sumas de los productos de las primeras y segundas amplitudes ponderadas con las oscilaciones en fase senoidales primera y segunda asociadas desplazadas en fase en 90 grados y enviar las sumas como señal de control, como mínimo, a un altavoz, si la amplitud global de la corriente es superior a la amplitud de referencia; o bien (S8~) formar las sumas de los productos de la primera y segunda amplitudes de la primera y segunda señales de control ideales con las primeras y segundas oscilaciones de ondas senoidales desplazadas en fase en 90 grados y enviar las sumas como señal de control a, como mínimo, un altavoz, si la amplitud global de corriente es menor o igual a la amplitud de referencia.
9. Procedimiento, según cualquiera de las reivindicaciones 6 a 8, en el que la etapa (S5~) de cálculo del factor de corrección de corriente a partir de la amplitud de referencia y la amplitud global de corriente comprende la formación del cociente de la amplitud de referencia y la amplitud global de corriente a efectos de obtener el factor de corrección de corriente.
10. Procedimiento, según cualquiera de las reivindicaciones 6 a 9, en el que la etapa (S3*; S3~) de cálculo de la primera amplitud global, a partir de las primeras amplitudes y la segunda amplitud global a partir de las segundas amplitudes comprende la realización de la raíz cuadrada de la suma de los cuadrados de las primeras amplitudes, a efectos de obtener la primera amplitud global, y hacer la raíz cuadrada de la suma de los cuadrados de las segundas amplitudes, a efectos de obtener la segunda amplitud global.
11. Procedimiento, según cualquiera de las reivindicaciones 1 a 10, en el que la amplitud de referencia está adaptada a la capacidad máxima de carga eléctrica del, como mínimo, un altavoz.
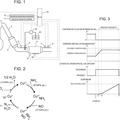
12. Sistema antisonoro para sistemas de escape de un vehículo accionado por un motor de combustión interna, que comprende:
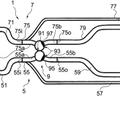
un control antisonido (10) ; como mínimo, un altavoz (12) , que está conectado al control antisonido (10) para recibir señales de control, en el que el altavoz (12) está diseñado para generar un antisonido como función de una señal de control recibida desde el control antisonido (10) en un generador de sonido (3) , que puede estar conectado fluídicamente al sistema de escape (4) ; y un micrófono de error (5) , que está conectado al control antisonido (10) y puede ser dispuesto en una localización del sistema de escape (4) situada con respecto al flujo de gas de escape en la zona de la conexión de fluido entre el generador de sonido (3) y el sistema de escape (4) , en el que el micrófono de error (5) está diseñado para medir sonido en el interior del sistema de escape (4) y enviar una correspondiente señal de medición al control antisonido (10) ; caracterizado porque el control antisonido (10) está diseñado para llevar a cabo el procedimiento, según cualquiera de las reivindicaciones 1 a 11, a efectos de cancelar, por lo menos parcialmente y preferentemente de modo completo, las señales obtenidas a partir del micrófono de error (5) por envío de la señal de control al, como mínimo, un altavoz (12) .
13. Vehículo de motor, que comprende:
un motor de combustión; un sistema de escape (4) , fluídicamente conectado al motor de combustión; y un sistema antisonido, según la reivindicación 12, en el que el generador de sonido (3) y el micrófono de error (5) están conectados al sistema de escape (4) .
Patentes similares o relacionadas:
 Aparato de control del gas de escape para un motor de combustión interna, del 29 de Julio de 2020, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de purificación del gas de escape para un motor de combustión interna, comprendiendo el aparato de purificación del gas de escape:
un catalizador de reducción […]
Aparato de control del gas de escape para un motor de combustión interna, del 29 de Julio de 2020, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de purificación del gas de escape para un motor de combustión interna, comprendiendo el aparato de purificación del gas de escape:
un catalizador de reducción […]
Método para limpiar gas residual de proceso o de escape de motor, del 17 de Junio de 2020, de HALDOR TOPS E A/S: Un método para eliminar materia particulada en forma de hollín, ceniza, metales y compuestos metálicos, junto con hidrocarburos y óxidos de nitrógeno que están presentes en […]
Sistema de reproducción de filtro, ECU y programa de reproducción de filtro, del 8 de Abril de 2020, de BOSCH CORPORATION: Un sistema de regeneración de filtro para un DPF que recolecta material en partículas, el sistema de regeneración de filtro comprende: una ECU que […]
 Método y sistema para gestionar una regeneración de un filtro de partículas, del 27 de Noviembre de 2019, de FPT Industrial S.p.A: Método para gestionar la regeneración de un filtro de partículas (DPF), el filtro de partículas comprende una entrada y una salida, el método […]
Método y sistema para gestionar una regeneración de un filtro de partículas, del 27 de Noviembre de 2019, de FPT Industrial S.p.A: Método para gestionar la regeneración de un filtro de partículas (DPF), el filtro de partículas comprende una entrada y una salida, el método […]
Aparato de control de gas de escape para motor de combustión interna y método de control para aparato de control de gas de escape, del 23 de Octubre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control de gas de escape para un motor de combustión interna que comprende: un catalizador de reducción de NOx dispuesto en un conducto […]
 Sistema de escape para un motor de automoción de combustión interna, del 25 de Septiembre de 2019, de Akrapovic d.d: Sistema de escape para un motor de automoción de combustión interna , tal como un motor en V o un motor tipo bóxer, que comprende:
un […]
Sistema de escape para un motor de automoción de combustión interna, del 25 de Septiembre de 2019, de Akrapovic d.d: Sistema de escape para un motor de automoción de combustión interna , tal como un motor en V o un motor tipo bóxer, que comprende:
un […]
Procedimiento y equipo para optimizar el comportamiento operativo de un vehículo motor con motor de combustión, del 12 de Junio de 2019, de Technische Universität Darmstadt: Vehículo de motor con: un sistema propulsor que comprende al menos un primer motor propulsor concebido como motor de combustible , […]
Procedimiento para la determinación basada en el modelo de la distribución de temperatura de una unidad de postratamiento de gases de escape, del 22 de Mayo de 2019, de MTU FRIEDRICHSHAFEN GMBH: Procedimiento para la determinación basada en el modelo de la distribución de temperatura de una unidad de postratamiento para gases de escape, en particular […]