PROCEDIMIENTO PARA LA DETERMINACION DE LA POSICION FUSIONANDO LA INFORMACION DE LOS NIVELES DE POTENCIA Y EL RETARDO TEMPORAL DE PROPAGACION DE LAS SEÑALES RECIBIDAS.
Procedimiento para la determinación de la posición fusionando la información de los niveles de potencia y el retardo temporal de propagación de las señales recibidas.
La invención se refiere a un procedimiento para la estimación de la posición de un dispositivo móvil que forma parte de una red inalámbrica, haciendo uso del nivel de potencia recibido y/o del retardo de propagación de las señales transmitidas entre el dispositivo a localizar y ciertos nodos de la red con posiciones fijas y conocidas denominados balizas. El procedimiento modela de manera adaptativa las principales fuentes de error en la estimación de la posición del dispositivo móvil en entornos complejos, que son propagación multicamino y ausencia de visión directa entre dispositivos. En la estimación de la posición se considera su evolución en el tiempo y se utiliza toda la información recogida hasta el momento mediante el empleo de un proceso de estimación recursiva.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201100870.
Solicitante: UNIVERSIDAD DE VALLADOLID.
Nacionalidad solicitante: España.
Inventor/es: FERNANDEZ REGUERO,PATRICIA, PRIETO TEJEDOR,Javier, BAHILLO MARTINEZ,Alfonso, DURAN BARROSO,Ramon Jose, ABOY CEBRIAN,Irene, LORENZO MATEO,Ruben Mateo, ABRIL DOMINGO,Evaristo Jose.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S5/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
Fragmento de la descripción:
Procedimiento para la determinación de la posición fusionando la información de los niveles de potencia y el retardo temporal de propagación de las señales recibidas.
Sector de la técnica:
La presente invención se engloba dentro del sector técnico de las comunicaciones
inalámbricas, y más específicamente dentro del sector de la radiolocalización, es decir, dentro de las tecnologías de localización que hacen uso de mediciones tomadas sobre las señales radioeléctricas que se transmiten en una red inalámbrica.Estado de la técnica:
Los sistemas GNSS (Global Navigation Satellite System) , con el sistema GPS (Global Positioning System) a la cabeza, han precedido el desarrollo de servicios basados en localización en áreas abiertas, donde existe una línea de visión directa (LOS, Line-Of-Sight) entre los satélites y el dispositivo móvil a localizar. Sin embargo, a pesar del éxito de dichas tecnologías, existe una demanda de servicios basados en localización en entornos densos urbanos y de interior (para, por ejemplo, mantener localizado a un paciente, para el guiado de personas, para publicidad personalizada, para ofrecer servicios de realidad aumentada, etc.) . No obstante, en estos entornos complejos, el comportamiento de las señales inalámbricas, impredecible y cambiante con el tiempo, hace que implementaciones convencionales no obtengan el resultado deseado, y que sistemas como GPS resulten completamente inútiles dada la degradación sufrida por dichas señales.
Hasta la fecha, se han desarrollado varios procedimientos para determinar la posición, que utilizan métricas tomadas sobre las señales radioeléctricas. Así por ejemplo, para localizar un dispositivo inalámbrico se puede emplear: el nivel de potencia recibida (RSS, Received Signal Strength) como en US6269246, US6393294, ES2242873T3 y EP0631453A2; el retardo temporal de propagación (RTP) como en ES2208954T3 y EP0800319Al; diferencias entre tiempos de llegada (P0260625) ; o el ángulo de llegada (E02006908) de dichas señales. Estos procedimientos intentan, en la medida de lo posible, mitigar las dos principales fuentes de error en entornos complejos, que son la propagación multicamino y la falta de visión directa (NLOS, Non-Line-Of-Sight) entre dispositivos. Sin embargo, a pesar de que aumentando las fuentes de información se puede conseguir una mayor precisión en las estimaciones, son pocos los procedimientos que combinan varias de estas métricas. Por ejemplo, E02006908 se sirve del RTP y del ángulo de llegada de las señales intercambiadas en la red, resolviendo el problema desde el punto de vista de la máxima verosimilitud sin tener en cuenta la relación de las posiciones del dispositivo inalámbrico en el tiempo (por ejemplo, la persona que porte este dispositivo no puede haberse alejado 100 metros de su posición anterior en un segundo) . Además, estos procedimientos asumen modelos estáticos para relacionar mediciones con posiciones, premisa que no se cumple en entornos complejos.
En la invención que se propone, se resuelve el problema técnico de determinación de la posición de un dispositivo inalámbrico en entornos complejos, a partir de valores RSS, o de valores RTP, o de ambos a la vez, sin necesidad de una etapa previa de calibración del entorno y sin conocer la relación exacta entre dichos valores y la posición. Dichas mediciones son obtenidas a partir de las señales radioeléctricas intercambiadas entre el dispositivo a localizar y varios nodos con posición conocida llamados balizas. Además, la invención aborda de manera dinámica las principales fuentes de error en este tipo de entornos, propagación multicamino y NLOS. Para ello, se obtiene una función de verosimilitud adaptativa de la posición del dispositivo inalámbrico, empleando funciones kernel para representar los valores medidos, y un modelo que los relaciona con la posición del dispositivo inalámbrico. Este modelo considera además el sesgo provocado por las mencionadas fuentes de error de un entorno complejo. Finalmente, a la hora de estimar la posición, se consideran las estimaciones anteriores realizadas a lo largo del tiempo mediante un proceso de estimación recursiva bayesiana.
El trabajo más cercano al problema que resuelve la presente invención se encuentra en el artículo de Bar-Sen Chen et al. titulado "Mobile Location Estimator in a Rough Wireless Environment Using Extended Kalman-Based IMM and Data Fusion" (Estimador de la localización de un móvil en un entorno inalámbrico dificil utilizando !MM basado en Kalman extendido y fusión de datos) , publicado en el IEEE Transactions on Vehicular Technology, VOL. 58, NO. 3, en Marzo de 2009. En este artículo se hace uso también de las métricas RSS y RT P para estimar la posición del dispositivo móvil. Sin embargo, el artículo se basa en la detección de propagación en LOS o NLOS mediante un modelo múltiple interactivo (!MM) , se emplean modelos estáticos para el canal de propagación y errores gaussianos. La presente invención, por el contrario, no realiza ninguna de estas suposiciones, difícilmente asumibles en entornos complejos, y que pueden causar un incremento del error en la estimación de la posición.
Descripción general de la invención:
En lo que sigue, la invención que se propone, se refiere a un procedimiento para la determinación de la posición de un dispositivo perteneciente a una red inalámbrica, haciendo uso de los niveles de potencia y/o del retardo temporal de propagación que se estén obteniendo en ese instante de tiempo, y del conocimiento de las posiciones de ciertos elementos de la red inalámbrica que llamaremos nodos baliza.
La invención propuesta resuelve el problema técnico de la estimación de la posición a partir de mediciones realizadas sobre las señales transmitidas entre los nodos de la red, en condiciones de propagación multicamino y/o falta de visión directa (NLOS) . Además, emplea de manera recursiva todos los valores RSS y/o RTP obtenidos hasta el instante de tiempo para el que se estima la posición. Puesto que la posición de un dispositivo móvil no puede variar infinitamente en un periodo corto de tiempo, la invención tiene en cuenta también la relación de las posiciones en el tiempo. Todo esto se realiza además sin la necesidad de una etapa previa de calibración del entorno.
Descripción detallada de la invención:
La presente invención utiliza los valores de potencia (RSS) y/o del retardo temporal de propagación (RTP) de la señal, para localizar un dispositivo móvil. A continuación se explica en detalle la invención con ayuda de las figuras 1, 2 Y3.
En una red inalámbrica existen M dispositivos inalámbricos móviles que se desean localizar, a los que llamaremos DL1, DLz, ... , DLM • Para poder localizar a un dispositivo concreto DLi , es necesario que se reciban señales de al menos tres nodos baliza en el caso de localizar en 2 dimensiones (2D) , o de al menos cuatro nodos baliza, en el caso de localizar en 3 dimensiones (3D) . A los Ni nodos baliza de los que recibe señal el dispositivo móvil DLi en un instante de tiempo concreto, los llamaremos DBi, v DBi, z, ... , DBi, Ni' Los nodos de la red pueden medir valores RSS y/o RTP, y pueden ser indistintamente el nodo a localizar, o los nodos baliza.
A partir de los valores RSS correspondientes a las señales intercambiadas entre el nodo a localizar DLi y cada nodo baliza en su rango de cobertura se determinan de forma dinámica los parámetros que caracterizan los modelos de propagación. Estos modelos de propagación relacionan los valores RSS medidos con la distancia entre el nodo a localizar DLi y cada uno de los nodos baliza en su rango de cobertura.
Para el nodo a localizar DLi y un nodo baliza DBi, j dado, se obtiene una función de verosimilitud de la distancia VDRSSi, j, utilizando los parámetros estimados para dicho canal de propagación y los valores RSS de las señales intercambiadas entre estos dos nodos mediante el
proceso adaptativo que se describe más adelante (ver figura 2) . El proceso se repite con cada nodo baliza en rango de cobertura del que se tienen mediciones RSS, de modo que si, por ejemplo, se tienen valores RSS de los Ni nodos baliza en rango de cobertura, se tendrán Ni funciones de verosimilitud de la distancia VDRSSi, v VDRSSi, 21 ••• , VDRSSi, N¡.
Para los valores RT P recogidos en un instante de tiempo, se procede de manera similar, dado un modelo que relaciona los valores RTP Y la distancia entre cada nodo baliza y el dispositivo a localizar. Para el nodo a localizar DLi y un nodo baliza DBi, j dado, se obtiene una función de verosimilitud de la distancia VD RTPi, j, utilizando el modelo que relaciona RT P Y distancia y los valores...
Reivindicaciones:
1. Procedimiento de localización de nodos o dispositivos en redes inalámbricas a partir de los valores de retardo temporal de propagación y del nivel de potencia de las señales intercambiadas entre el nodo a localizar y el resto de nodos de la red, que comprende las etapas de:
a. obtener valores de potencia recibida de las señales intercambiadas entre el dispositivo a localizar y cada uno de los nodos baliza en su rango de cobertura.
b. estimar dinámicamente todos los parámetros de los modelos de propagación que caracterizan cada uno de los distintos canales de propagación existentes entre el nodo a localizar y cada uno de los restantes nodos baliza que se encuentran dentro de su rango de cobertura.
c. estimar dinámicamente la distribución de los valores de potencia recibidos de las señales transmitidas entre el dispositivo a localizar y los nodos baliza en rango de cobertura, mediante una mixtura de funciones kernel.
d. estimar cada una de las funciones de verosimilitud de la distancia entre el nodo a localizar y los nodos baliza en rango de cobertura, a partir de la distribución de los valores de potencia recibida, los parámetros de los modelos de propagación que caracterizan cada uno de los distintos canales, y una función de distribución del sesgo provocado por el error en la estimación de dichos parámetros.
e. obtener valores del retardo de propagación de las señales intercambiadas entre el dispositivo a localizar y cada uno de los nodos baliza en su rango de cobertura.
f. estimar dinámicamente la distribución de los valores del retardo temporal de propagación de las señales transmitidas entre el dispositivo a localizar y los nodos baliza en rango de cobertura, mediante una mixtura de funciones kernel.
g. estimar cada una de las funciones de verosimilitud de la distancia entre el nodo a localizar y el resto de nodos baliza en rango de cobertura a partir de la distribución de los valores de retardo temporal de propagación, el modelo que relaciona este retardo con la distancia entre los nodos, y una función de distribución del sesgo positivo provocado por la falta de una línea de visión directa (NLOS) .
h. estimar dinámicamente la función de verosimilitud de la posición del nodo a localizar mediante multiplicación de las funciones de verosimilitud de la
distancia a cada uno de los nodos baliza en su rango de cobertura, expresadas
estas en función de las coordenadas del dispositivo a localizar.
1. estimar la posición inicial por maximización de la función de verosimilitud de
la posición del nodo a localizar.
5 j. estimar la posición del dispositivo a localizar en cada instante de tiempo
distinto al inicial utilizando, de manera recursiva, todas las funciones de
verosimilitud de la posición previamente estimadas, así como el modelo
dinámico que relaciona la posición en un instante de tiempo con la posición en
el instante de tiempo siguiente.
10
2. Un programa implementado sobre cualquier dispositivo físico adaptado para ejecutar el
método de la reivindicación anterior.
15
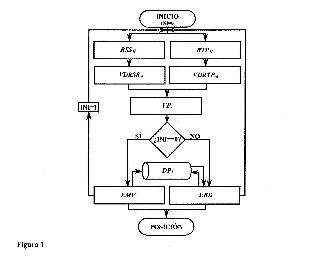
INICIO
INI=O
Figura 1
SesgoKSS
Figura 2
" / 6l
I DRil I:::::@
:\lodelo RTP-distancia J-1... ---------~~
SesgoRTP
Figura 3
Patentes similares o relacionadas:
Método y sistema computarizados de seguimiento y advertencia de proximidad para el personal, la planta y el equipo que funcionan tanto por encima como por debajo del suelo o su movimiento entre ellos, del 1 de Julio de 2020, de EMB Safety Helmet Pty Ltd: Un sistema informatizado de advertencia de proximidad y seguimiento de seguridad para el personal , la planta y el equipo […]
CASCO INTELIGENTE PARA MOTOS, del 19 de Junio de 2020, de JURADO SECO, Sacha: 1. Casco inteligente para motos, caracterizado porque está formado por un casco de moto con conectividad, que incorpora un micrófono , auriculares , cámaras de […]
Método y dispositivo para mejorar la determinación de la posición, del 27 de Mayo de 2020, de DEUTSCHE TELEKOM AG: Método para mejorar la determinación de la posición de un dispositivo de comunicación móvil, con las siguientes etapas de método: a) proporcionar una información […]
Localización de una baliza de emergencia, del 20 de Mayo de 2020, de THALES: Un procedimiento implementado por ordenador para procesar la señal transmitida por una baliza de emergencia, siendo recibida dicha señal por […]
MÉTODO PARA DETERMINAR EL MODO DE TRANSPORTE DE UNA POBLACIÓN A PARTIR DE DATOS DE FACTURACIÓN DE SERVICIOS MÓVILES, del 14 de Mayo de 2020, de UNIVERSIDAD DEL DESARROLLO: La presente invención se relaciona al campo de los sistemas y métodos para procesamiento de datos, más específicamente con métodos de procesamiento de datos con […]
Procedimiento y sistema de geolocalización para el cálculo directo de elementos de desplazamiento, del 13 de Mayo de 2020, de THALES: Procedimiento para determinar la posición de uno o varios objetos susceptibles de desplazarse en una red, estando dotados uno o varios objetos […]
Dispositivo, sistema y procedimiento de lector de etiquetas de datos portátil para identificar la localización de una etiqueta de datos, del 1 de Abril de 2020, de SYMBOL TECHNOLOGIES, LLC: Procedimiento para identificar la localización de una etiqueta de datos portátil, comprendiendo el procedimiento: leer la etiqueta de datos […]
Ubicación de la posición para sistemas de comunicación inalámbrica, del 11 de Marzo de 2020, de QUALCOMM INCORPORATED: Un procedimiento, que comprende: recibir una señal piloto de ubicación de la posición desde una estación base en una estación móvil , la señal piloto de ubicación […]