Procedimiento de funcionamiento de un elevador para buques.
Procedimiento para el funcionamiento de un mecanismo de elevación provisto de una plataforma que incluye una pluralidad de vigas transversales principales ("MTB"),
estando cada MTB soportada por por lo menos una grúa, que comprende:
a) leer una carga en cada viga transversal principal;
b) determinar si la carga en cualquiera de las MTB es diferente de la carga en cualquier otra MTB en más de una cantidad predeterminada;
c) seleccionar por lo menos una MTB, la cual tiene una carga diferente de la carga de cualquier otra MTB en más de una cantidad predeterminada;
d) determinar por lo menos un límite de seguridad, por el cual la MTB seleccionada puede ser movida verticalmente con respecto a las MTB adyacentes;
e) mover verticalmente la MTB seleccionada con respecto a las otras MTB dentro del límite de seguridad para transferir la carga entre la MTB seleccionada y las otras MTB;
f) monitorizar las cargas en cada MTB y la posición de la MTB seleccionada, a medida que continúa el movimiento vertical de la MTB seleccionada;
g) comparar las cargas y la posición monitorizadas con el límite de seguridad; y
h) detener el movimiento de la MTB seleccionada cuando se ha completado la transferencia de la carga deseada, o cuando se ha alcanzado el límite de seguridad.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2005/021194.
Solicitante: ROLLS-ROYCE NAVAL MARINE INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 110 NORFOLK STREET WALPOLE, MA 02081 ESTADOS UNIDOS DE AMERICA.
Inventor/es: ATTWATER,IAIN J, CAYOCCA,IVER D, SHANKS,RICHARD J.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63C3/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52). › B63C 3/00 Botadura o varado de buques por gradas de tierra, p. ej. por gradas de tierra; Slipways (guías a bordo de los buques para la maniobra de los botes salvavidas o similares B63B 23/30; grúas, cabrias o similares B66; elevación de embarcaciones para adaptarse a diferentes niveles de agua E02C). › por movimiento vertical de la embarcación, p. ej. por grúa.
- B65C1/00 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65C MAQUINAS, APARATOS O PROCEDIMIENTOS DE ETIQUETADO (clavado o grapado en general B25C, B27F; procedimientos para aplicar calcomanías B44C 1/16; aplicación de etiquetas para embalaje B65B; etiquetas, placas de identificación G09F). › Etiquetado sobre superficies planas prácticamente rígidas (etiquetado de tejidos B65C 5/00).
PDF original: ES-2433066_T3.pdf
Fragmento de la descripción:
Procedimiento de funcionamiento de un elevador para buques.
Antecedentes de la invención La presente invención se refiere a ascensores para buques y en particular a un procedimiento de funcionamiento de un elevador para buques.
Un ascensor para buques globalmente incluye dos filas de grúas conectadas en lados opuestos de una plataforma de elevación. Las grúas pueden ser de muchos tipos, incluyendo cabrestantes accionados eléctrica o hidráulicamente o arietes hidráulicos y pueden estar conectados a la plataforma de maneras alternativas, incluyendo mediante un cable de acero o cadena. El número y el tamaño de cabrestantes empleado se pueden variar como se desee dependiendo de la carga que se va a elevar. Un ascensor de buques típico utilizará entre 4 y 110 grúas.
La plataforma de un ascensor para buques puede ser rígida o, tal como proporciona el titular de la presente solicitud, puede estar articulada de tal modo que partes de la plataforma se puedan mover verticalmente con relación a otras partes de la plataforma. En una plataforma del tipo típicamente utilizado por el titular de la presente invención, la plataforma incluye una pluralidad de vigas transversales principales ("MTB") que son capaces de articular una con respecto a otra dentro de una gama específica del movimiento. Cada MTB está soportada entre dos grúas conectadas en extremos opuestos de la MTB. Las MTB están conectadas juntas de una manera conocida para formar la plataforma mientras todavía permiten un relativo movimiento entre las respectivas MTB. En algunas circunstancias, la plataforma puede estar construida con dos o más secciones que pueden funcionar juntas para elevar buques/barcos más grandes, o pueden ser accionadas independientemente unas de las otras para elevar independientemente dos o más buques/barcos más pequeños. El documento NL 9002650 se considera que es la técnica anterior más próxima y expone un ascensor para buques en el que las MTB pueden ser mantenidas en un plano horizontal común.
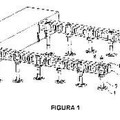
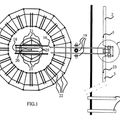
Otro ejemplo de un ascensor para buques de la técnica anterior con el cual se puede utilizar la presente invención se describe en la patente americana US nº RE 37, 061 "Method of Distributing Loads Generated Between A Ship and A Supporting Dr y Dock", cedida al titular de la presente invención y representado en este documento en las figuras 1
4. Con referencia a la figura 1, una plataforma 13 de la clase descrita en la patente US nº 4.087.979 soporta un buque 9 para el movimiento vertical con respecto a un muelle 10 (figura 2) . Con referencia ahora a la figura 2, la plataforma 13 incluye una pluralidad de MTB 20, los extremos de las cuales descansan en el interior de muescas 17 en las caras opuestas de los muelles 10 (figura1) y 12 (figura 4) . Los extremos de las vigas 20 transportan roldanas18.
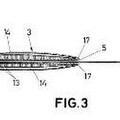
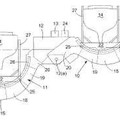
Se utiliza una pluralidad de pares de grúas opuestas, en este caso en forma de cabrestantes de grúas 19. Véase la figura 4. Cada cabrestante de grúa 19 está fijado a su respectivo muelle y soportan una roldana adicional 21 en alineación aproximadamente vertical con las roldanas 18 y adicionalmente incluye un tambor del cabrestante 29. Véanse las figuras 2 y 3 un cable de acero 27 está fijado por un extremo a una célula de carga 25 la cual también se duplica como un pasador de horquilla y está fijado al extremo de la estructura del cabrestante de grúa 19. El cable 27 está enrollado alrededor de las roldanas 18 y 21, el extremo restante saliendo de las roldanas 18 y estando conectado al tambor del cabrestante 29. Cada tambor del cabrestante 29 es accionado por un motor de corriente alterna síncrono 33 a través de una instalación de engranajes reductores 35 y una rueda dentada 37 en el extremo del tambor 29. Un interruptor de fin de carrera 41 está fijado a la estructura del cabrestante de grúa 19 y una almohada de contacto 43 es transportada por la viga 20. El interruptor de fin de carrera está previamente instalado y cuando la plataforma 13 se eleva a su altura deseada durante el funcionamiento, la almohada 43 entra en contacto con el interruptor de fin de carrera 41 el cual es entonces accionado para efectuar la parada de la plataforma 20. Dispositivos (no representados) dentro del sistema se utilizan para determinar las posiciones descendidas deseadas máximas de la plataforma 13.
Durante el funcionamiento de los cabrestantes de grúa 19 para elevar o descender la plataforma 13 y su buque asociado 9, un circuito de acondicionamiento 28 recibe señales eléctricas desde la célula de carga 25 asociada con ese cabrestante 19. Véase la figura 4. La salida desde cada circuito 28 es enviada al ordenador/CPU 47. El ordenador 47 puede procesar los datos recibidos y envía señales de control al panel de control del elevador del buque, deteniendo o permitiendo el funcionamiento de los cabrestantes de grúa 19 y puede enviar señales adicionales a un conjunto de visualizador 49 de modo que visualice información concerniente al comportamiento del funcionamiento de los cabrestantes de grúa 19, por ejemplo las cargas que están siendo detectadas, y también la corriente que está siendo extraída por el motor del cabrestante 33, el peso del barco que está siendo elevado/descendido y otras características del sistema.
La figura 5 muestra un visualizador tanto en forma numérica como de histograma de la distribución del peso de un buque particular sobre los cabrestantes de grúa 19. Las estaciones de cabrestante opuestas 1A y 1B están cada una experimentando una carga de 73, 8 toneladas. Las estaciones 4A y 4B están cada una experimentando una carga de 256 toneladas y las estaciones 6A y 6B están cada una experimentando una carga de 72 toneladas. Los pesos indicados a partir de cero hacia arriba se refieren al buque. Las prolongaciones de los histogramas por debajo de la línea de cero son idénticas en extensión y corresponden al peso constante de la plataforma.
La descripción anterior divulga la utilización de una célula de carga 25 en forma de un pasador de horquilla. Sin embargo, otras formas de célula de carga se pueden utilizar y pueden estar colocadas en cualquier parte en la trayectoria de carga de las cargas que experimentan los cabrestantes de grúa 19 durante el funcionamiento. Por lo tanto, a título de ejemplo, las células de carga pueden estar colocadas en la estructura de soporte 51 de las roldanas de los cabrestantes de grúa 21, o en 53 entre los cabrestantes de grúa 19 y los muelles 10 y 12, o en los soportes de pasador de horquilla, esto es, a través de la utilización de un pasador de horquilla normal 25 soportado en una célula de carga de una forma apropiadamente adaptada.
Un sistema de control de un ascensor para buques conocido suministrado por el titular de la presente solicitud, comercializado bajo el nombre ATLASTM, proporciona información del funcionamiento del ascensor para buques al operario del ascensor para buques. Por ejemplo, incluye una pantalla de distribución de la carga calculada, que indica la carga probable distribuida de un barco calculada a partir de los datos introducidos por el operario. Si cualquier carga distribuida está por encima de la carga distribuida designada máxima, el monitor visualizará un aviso de que el barco puede sobrecargar el ascensor para buques y no debe ser atracado en el dique. Si se indica un aviso, la distribución de la carga del barco en los bloques se puede cambiar moviendo el centro de gravedad más cerca de la línea central del bloqueo cargado. Los siguientes parámetros del dique son introducidos por el operario:
W = carga del buque LK = la longitud de los bloques que van a soportar la quilla A = la distancia del primer bloque a la compuerta de la orilla en metros (pies)
LCG = la distancia desde el centro de gravedad del buque a la compuerta de la orilla.
Los límites establecidos se representarán en una ventana del visualizador junto con una caja de ajustes de entrada para la entrada de valores. El visualizador mostrará la distribución de la carga calculada para el barco que se va a atracar en el dique.
El sistema ATLASTM incluye también un modo de centro de gravedad el cual proporciona información sobre el centro de gravedad longitudinal y transversal del barco en la plataforma y la carga del buque en cada viga transversal principal.
Esta información puede ser utilizada por el operario para identificar cualquier anormalidad en el atraque en el dique tal como una colocación incorrecta del barco.
Las patentes americanas US RE 36.971, "Method of Determining and Analyzing A Ship's weigh"y RE 37, 061, "Method of Distributing Loads Generated Between A Ship And A Supporting Dr y Dock", describen ambas procedimientos de funcionamiento de un ascensor para buques.
Las patentes americanas... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para el funcionamiento de un mecanismo de elevación provisto de una plataforma que incluye una pluralidad de vigas transversales principales ("MTB") , estando cada MTB soportada por por lo menos una grúa, que comprende:
a) leer una carga en cada viga transversal principal;
b) determinar si la carga en cualquiera de las MTB es diferente de la carga en cualquier otra MTB en más de una cantidad predeterminada;
c) seleccionar por lo menos una MTB, la cual tiene una carga diferente de la carga de cualquier otra MTB en más de una cantidad predeterminada;
d) determinar por lo menos un límite de seguridad, por el cual la MTB seleccionada puede ser movida verticalmente con respecto a las MTB adyacentes;
e) mover verticalmente la MTB seleccionada con respecto a las otras MTB dentro del límite de seguridad para transferir la carga entre la MTB seleccionada y las otras MTB;
f) monitorizar las cargas en cada MTB y la posición de la MTB seleccionada, a medida que continúa el movimiento vertical de la MTB seleccionada;
g) comparar las cargas y la posición monitorizadas con el límite de seguridad; y
h) detener el movimiento de la MTB seleccionada cuando se ha completado la transferencia de la carga deseada, o cuando se ha alcanzado el límite de seguridad.
2. Procedimiento según la reivindicación 1, en el que la determinación del límite de seguridad incluye la comparación de la posición actual de la MTB seleccionada con respecto a las MTB adyacentes y su comparación con una gama permisible del movimiento entre MTB adyacentes.
3. Procedimiento según la reivindicación 1, en el que la determinación del límite de seguridad incluye la limitación del movimiento a aquél que no permitirá una carga en cualquier MTB que exceda de una carga máxima permitida en la MTB.
4. Procedimiento según la reivindicación 1, en el que un grupo de vigas trasversales principales provistas de unas respectivas cargas diferentes de las cargas de las otras MTB en más de una cantidad previamente determinada se selecciona y se mueve verticalmente con respecto a las otras MTB.
5. Procedimiento según la reivindicación 1, en el que se proporciona una alarma si el movimiento de la MTB seleccionada se detiene.
6. Procedimiento según la reivindicación 1, en el que únicamente un primer extremo de la MTB seleccionada se mueve verticalmente con respecto a las otras MTB y un segundo extremo de la MTB seleccionada se mantiene verticalmente estacionario.
7. Procedimiento según la reivindicación 1, en el que ciertas MTB de la plataforma no son tenidas en cuenta en la selección de la MTB que se va a mover.
8. Procedimiento según la reivindicación 1, en el que la MTB seleccionada se hace descender para transferir la carga desde la misma hasta otras MTB.
9. Procedimiento según la reivindicación 1, en el que la MTB seleccionada se eleva para transferir la carga a la misma desde otras MTB.
Patentes similares o relacionadas:
Carretilla elevadora, en particular para levantar y apilar embarcaciones, del 21 de Junio de 2017, de Boat Eagle S.r.l: Carretilla elevadora, en concreto para levantar y apilar embarcaciones, caracterizada porque comprende: - un bastidor principal autopropulsado con ruedas; […]
Aparato desplazable de atraque en seco para embarcaciones, del 2 de Junio de 2016, de DE LA CIERVA VILLAMOR, Juan Jose: Aparato desplazable de atraque en seco para embarcaciones de los constituidos por dos pórticos que soportan dos grandes tanques que son capaces de hundirse para recibir una […]
 DISPOSITIVO PROTECTOR DE CASCOS DE EMBARCACIONES, del 13 de Noviembre de 2012, de ERABAKI 2010, S.L.L. (100.0%): Dispositivo protector de cascos de embarcaciones.
Está destinado en principio a evitar daños en la superficie exterior de un barco durante su manipulación […]
DISPOSITIVO PROTECTOR DE CASCOS DE EMBARCACIONES, del 13 de Noviembre de 2012, de ERABAKI 2010, S.L.L. (100.0%): Dispositivo protector de cascos de embarcaciones.
Está destinado en principio a evitar daños en la superficie exterior de un barco durante su manipulación […]
 SISTEMA UNIVERSAL DE PUESTA A FLOTE Y BOTADURA Y MÉTODO DE FUNCIONAMIENTO, del 9 de Mayo de 2012, de GRUPO DE INGENIERIA OCEANICA, S.L: Sistema universal de puesta a flote y botadura y método de funcionamiento que comprende una o varias plataformas sobre las que se apoyará […]
SISTEMA UNIVERSAL DE PUESTA A FLOTE Y BOTADURA Y MÉTODO DE FUNCIONAMIENTO, del 9 de Mayo de 2012, de GRUPO DE INGENIERIA OCEANICA, S.L: Sistema universal de puesta a flote y botadura y método de funcionamiento que comprende una o varias plataformas sobre las que se apoyará […]
 Sistema de dique seco flotante, del 29 de Marzo de 2012, de WELCOME INN INVESTMENTS NV: Dique seco flotante para la elevación de un barco dentro o fuera del agua, el dique seco comprendiendo una base flotante con uno o más cascos flotantes, […]
Sistema de dique seco flotante, del 29 de Marzo de 2012, de WELCOME INN INVESTMENTS NV: Dique seco flotante para la elevación de un barco dentro o fuera del agua, el dique seco comprendiendo una base flotante con uno o más cascos flotantes, […]
MAQUINA ELEVADORA PARA EL TRANSPORTE SIMULTANEO EN AGUA Y EN SUPERFICIE SECA DE VARIAS EMBARCACIONES., del 1 de Diciembre de 2004, de GALLUCCIO,ANTON MASSIMO: La invención consiste en la combinación de una estructura fija , conformada en puente, provista en la parte superior de una guía de deslizamiento , que desde […]
PLATAFORMA DE ELEVACION DE DIQUE SECO, del 16 de Febrero de 1979, de PEARLSON, RAYMOND: Plataforma de elevación de dique seco que incluye una plataforma de secciones múltiples que puede desplazarse verticalmente, caracterizada porque está […]
 DISPOSITIVO DE APARCAMIENTO DE BARCOS CON PUESTA EN SECO Y PUESTA A FLOTE AUTOMATIZADAS, del 16 de Marzo de 2008, de JOUVES, MAX: Dispositivo portuario para el desplazamiento mecánico y automatizado de embarcaciones, en particular de recreo, entre un puesto de levantamiento/puesta […]
DISPOSITIVO DE APARCAMIENTO DE BARCOS CON PUESTA EN SECO Y PUESTA A FLOTE AUTOMATIZADAS, del 16 de Marzo de 2008, de JOUVES, MAX: Dispositivo portuario para el desplazamiento mecánico y automatizado de embarcaciones, en particular de recreo, entre un puesto de levantamiento/puesta […]