CONTROL DE UN BARCO PROPULSADO POR CHORRO DE AGUA.
Procedimiento para controlar el rumbo de una embarcación, que comprende:
adquirir un rumbo deseado de la embarcación; adquirir un rumbo real de la embarcación en el momento T0; calcular un error de rumbo comparando el rumbo deseado con el rumbo real; determinar una tasa de cambio del error de rumbo: determinar ganancias de algoritmo utilizadas para controlar al menos una de entre la cantidad y la tasa de una desviación de una tobera de la embarcación para su utilización en mantener el rumbo de la embarcación; determinar un valor para una señal de control de tobera teniendo en cuenta cada ganancia de algoritmo determinada; determinar una cantidad de desviación para una tobera de la embarcación, para modificar un rumbo de la embarcación, basándose en el valor para la señal de control de tobera; desviar la tobera basándose en la cantidad de desviación determinada; repetir las etapas anteriores hasta que el rumbo real sea igual que el rumbo deseado
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2004/039936.
B63H11/107TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00). › B63H 11/00 Propulsión marina por reactores de agua. › Control de la dirección del fluido propulsivo.
B63H25/04B63H […] › B63H 25/00 Gobierno; Disminución de marcha utilizando medios distintos a los elementos propulsores (que emplean unidades de propulsión fueraborda instaladas de forma amovible B63H 20/00 ); Anclaje o amarre dinámico, es decir, posicionamiento de los buques por medio de elementos propulsores auxiliares o principales. › de funcionamiento automático, p. ej. sujetos a la brújula.
B63H25/46B63H 25/00 […] › Gobierno o anclaje dinámico por chorros.
Clasificación PCT:
B63H25/04B63H 25/00 […] › de funcionamiento automático, p. ej. sujetos a la brújula.
G05D1/02FISICA. › G05CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Clasificación antigua:
B63H25/00B63H […] › Gobierno; Disminución de marcha utilizando medios distintos a los elementos propulsores (que emplean unidades de propulsión fueraborda instaladas de forma amovible B63H 20/00 ); Anclaje o amarre dinámico, es decir, posicionamiento de los buques por medio de elementos propulsores auxiliares o principales.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania.
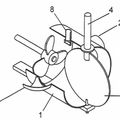
La presente solicitud reivindica prioridad frente a la solicitud de patente provisional estadounidense 60/525.888, presentada el 1 de diciembre de 2003. Antecedentes La presente invención se refiere al control de un barco propulsado por chorro de agua. Los barcos propulsados por chorro de agua de este tipo son conocidos y pueden oscilar en su tamaño desde pequeñas embarcaciones particulares hasta botes de hasta 75 pies de longitud, o barcos con un tamaño incluso más grande. Un barco accionado por chorro de agua se mueve a través del agua acelerando una corriente de agua a través de una tobera, moviendo así el barco en reacción a la corriente acelerada de agua. La tobera puede fijarse a la parte trasera del barco y dirigirse para producir fuerzas laterales en el barco que se utilizan para dirigir el barco. El chorro de agua está o bien en funcionamiento y bombeando agua o bien no está en funcionamiento ni bombeando agua. También pueden usarse múltiples chorros de agua/toberas. La tobera en la parte trasera del barco también está equipada habitualmente con un álabe de inversión que, cuando está activado, redirige parte o todo el flujo de tobera para producir una componente invertida de empuje en el barco. Un propulsor de chorro de agua también puede posicionarse en o cerca de la proa del barco con su eje esencialmente perpendicular al eje proa-popa del barco para producir fuerzas laterales en la proa del barco. En combinación, el álabe de inversión de tobera trasera y el propulsor de proa pueden usarse para simultáneamente maniobrar la embarcación en cualquier rumbo o dirección deseados. El barco puede estar equipado con una palanca de mando de múltiples ejes que permite al operario controlar simultáneamente el ángulo de tobera, la posición del álabe de inversión, y los propulsores de proa. El movimiento hacia delante y atrás de la palanca de mando activa el álabe de inversión. El movimiento lateral de la palanca de mando activa el propulsor de proa, y el ángulo de tobera se controla mediante un movimiento de giro de la palanca de mando. La patente estadounidense n.º 6.234.100 concedida a Fadeley, con fecha de 22 de mayo de 2001, da a conocer un Stick Control System For Waterjet Boats y la patente estadounidense n.º 6.230.642 concedida a McKenney, con fecha de 15 de mayo de 2001 da a conocer un Autopilot Based Steering and Maneuvering System For Boats. La solicitud de patente estadounidense n.º 2003/0054707 concedida a Morvillo, con fecha de 20 de marzo de 2003, da a conocer un Integral Reversing and Trim Deflector and Control Mechanism y la solicitud de patente estadounidense n.º 2003/0079668 concedida a Morvillo, con fecha de 1 de mayo de 2003 da a conocer un Method and Apparatus for Controlling A Waterjet Driven Marine Vessel. El documento WO 01/34463, que se considera el estado de la técnica más próximo, da a conocer un sistema de control de palanca de mando para un barco propulsado por chorro de agua. A pesar del grado de control ofrecido por estos sistemas de control de dirección y maniobra, sigue existiendo la necesidad de un sistema de control que mejore los algoritmos de control para proporcionar un sistema de control más predecible que sea de funcionamiento más intuitivo. Sumario de la invención La presente invención incluye varias realizaciones para controlar una embarcación. Una primera realización incluye adquirir un rumbo deseado de la embarcación, adquirir un rumbo real de la embarcación en el momento To, calcular un error de rumbo comparando el rumbo deseado con el rumbo real, determinar una tasa de cambio del error de rumbo y determinar una ganancia P, ganancia I y ganancia D para su utilización en mantener el rumbo de la embarcación. A continuación, se determinan un PtermT0, ItermT0, y DtermT0 utilizando las siguientes ecuaciones: donde P, I y D son la ganancia P, ganancia I y ganancia D determinadas, respectivamente. A continuación se determina un valor para Control OutT0 sumando los valores para PtermT0, ItermT0, y DtermT0 y a continuación se determina una cantidad de desviación para una tobera de la embarcación, para modificar un rumbo de la embarcación, basándose en el valor para Control OutT0. La tobera se desvía basándose en la cantidad determinada 2 E04817006 03-11-2011 de desviación y se reajusta To a T0+1 repitiéndose las etapas hasta que el rumbo real sea igual que el rumbo deseado. Una segunda realización para calcular un rumbo de una embarcación incluye adquirir un rumbo de la embarcación en un momento inicial, adquirir una velocidad de viraje de rumbo a partir de un sensor de velocidad de viraje angular de la embarcación en un momento posterior y determinar si el rumbo adquirido se considera preciso en el momento posterior. Si el rumbo adquirido no se considera preciso, se calcula un rumbo de la embarcación añadiendo un factor para la velocidad de viraje de rumbo al rumbo adquirido y la salida de rumbo calculado para el control del rumbo de la embarcación. Una realización adicional para corregir el rumbo de una embarcación, incluye medir una cantidad de error inducida por el efecto de al menos una alteración en al menos uno de datos de rumbo x, y y z a partir de un sensor de rumbo, adquirir al menos uno de datos de rumbo x, y y z a partir de un sensor de rumbo, determinar si la al menos una alteración se está produciendo, corregir los datos del rumbo al producirse una alteración añadiendo un factor al rumbo que compensa la cantidad medida de error inducido por la alteración y proporcionar los datos correctos del rumbo para el control del rumbo de la embarcación. Una realización adicional para controlar el balanceo de una embarcación incluye determinar si un aparato de control de tobera está descentrado para modificar una posición de una tobera de la embarcación y si el aparato de control de tobera está descentrado, fijar una orden de control de tobera en una orden de aparato de control de tobera, determinar si el aparato de control de tobera se ha devuelto a una posición central, determinar una velocidad de rumbo para la embarcación y si el aparato de control de tobera se ha devuelto a una posición central, fijar una orden de control de tobera en un valor negativo de la velocidad de rumbo multiplicado por un factor constante predeterminado para la embarcación basándose en datos operativos de la embarcación. Una realización adicional para controlar una embarcación que presenta una tobera trasera para la propulsión y un propulsor de proa incluye, durante al menos uno de inicio y cese del movimiento lateral de la embarcación, establecer previamente un ángulo de la tobera trasera para proporcionar una fuerza lateral que minimice una guiñada del barco antes de que se produzca un error de rumbo, basándose el ángulo establecido previamente en las características operativas de la embarcación. Una realización adicional para controlar una embarcación que presenta una tobera trasera para la propulsión y un propulsor de proa incluye iniciar un movimiento lateral de la embarcación poniendo en funcionamiento la tobera trasera mientras se retarda el funcionamiento del propulsor de proa y poniendo en funcionamiento el propulsor de proa tras un primer retardo de tiempo predeterminado para ayudar en el movimiento lateral de la embarcación después de que la popa de la embarcación haya obtenido un impulso lateral a partir de la tobera trasera, basándose el primer retardo de tiempo predeterminado en las características operativas de la embarcación para minimizar la guiñada de la embarcación durante el movimiento lateral. Una realización adicional para el control de una embarcación que presenta un sensor magnético para determinar el rumbo de la embarcación incluye reducir el efecto de la interferencia del campo electromagnético del equipo eléctrico de la embarcación en la precisión de una señal de rumbo a partir del sensor magnético que controla la utilización de la señal de rumbo basándose en al menos uno de un modo de función de la embarcación y una posición de un aparato de control del movimiento del barco mediante al menos uno de: compensar la interferencia de campo y adquirir la señal de rumbo sólo cuando la interferencia electromagnética es lo suficientemente baja como para evitar una falta de precisión sustancial de los datos del rumbo. Breve descripción de los dibujos La figura 1 es un diagrama de flujo lógico para una primera realización de la presente invención; la figura 2 es un diagrama de flujo lógico para una segunda realización de la presente invención; la figura 3 es un diagrama de flujo lógico para una tercera realización de la presente invención; la figura 4 es un diagrama de flujo lógico para una cuarta realización de la presente invención; la figura 5 es un diagrama de flujo lógico para una quinta realización de la presente invención; la figura 6 es... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para controlar el rumbo de una embarcación, que comprende: adquirir un rumbo deseado de la embarcación; adquirir un rumbo real de la embarcación en el momento T0; calcular un error de rumbo comparando el rumbo deseado con el rumbo real; determinar una tasa de cambio del error de rumbo: determinar ganancias de algoritmo utilizadas para controlar al menos una de entre la cantidad y la tasa de una desviación de una tobera de la embarcación para su utilización en mantener el rumbo de la embarcación; determinar un valor para una señal de control de tobera teniendo en cuenta cada ganancia de algoritmo determinada; determinar una cantidad de desviación para una tobera de la embarcación, para modificar un rumbo de la embarcación, basándose en el valor para la señal de control de tobera; desviar la tobera basándose en la cantidad de desviación determinada; repetir las etapas anteriores hasta que el rumbo real sea igual que el rumbo deseado. 2. Procedimiento según la reivindicación 1, en el que al menos una de la cantidad de desviación de la tobera y una tasa de desviación de tobera se limita basándose en las RPM de un motor de la embarcación. 3. Procedimiento según la reivindicación 1 ó 2, y que comprende además: determinar si un propulsor de proa de la embarcación está activo; seleccionar las ganancias de algoritmo a partir de un primer conjunto de datos de ganancia si el propulsor está activo y a partir de un segundo conjunto de datos de ganancia si el propulsor no está activo. 4. Procedimiento según cualquiera de las reivindicaciones 1 a 3, y que comprende además: seleccionar las ganancias de algoritmo a partir de diversos conjuntos de datos basándose en al menos uno de entre: RPM del motor, velocidad de la embarcación, posición del timón o dispositivo de dirección, posición de un álabe de inversión asociado con una tobera de la embarcación, dirección de fuerza de un propulsor de la embarcación, modo de funcionamiento de la embarcación y un posicionamiento de la interfaz de control de la embarcación de un operario. 5. Procedimiento según cualquiera de las reivindicaciones 1 a 4, en el que las ganancias de algoritmo son una ganancia P, ganancia I y ganancia D y la señal de control de tobera Control OutT0 se determina sumando los valores para PtermT0, ItermT0, y DtermT0; donde PtermT0, ItermT0, y DtermT0 se determinan utilizando las siguientes ecuaciones: donde P, I y D son la ganancia P, ganancia I y ganancia D determinadas, respectivamente; reajustar To a T0+1 y luego repetir las etapas hasta que el rumbo real sea igual que el rumbo deseado. 6. Procedimiento según cualquiera de las reivindicaciones 1 a 5, y que comprende además: adquirir el rumbo real a partir de un sensor de rumbo. 7. Procedimiento según la reivindicación 6, en el que el sensor de rumbo es un sensor de rumbo de tres ejes. 12 E04817006 03-11-2011 8. Procedimiento según la reivindicación 6 ó 7, y que comprende además: medir un cabeceo y un balanceo de la embarcación y utilizar tales datos para corregir una señal del sensor de rumbo para el error debido al cabeceo y el balanceo. 9. Procedimiento según cualquiera de las reivindicaciones 6 a 8, y que comprende además: determinar si se está produciendo una alteración magnética que pueda afectar a la precisión del rumbo a partir del sensor de rumbo; seleccionar las ganancias de algoritmo a partir de un primer conjunto de datos de ganancia si no se está produciendo una alteración magnética y a partir de un segundo conjunto de datos de ganancia si se está produciendo un acontecimiento magnético, en el que el segundo conjunto de datos de ganancia respectivamente disminuye un factor de ponderación de las ganancias que se derivan de una fuente magnética afectada por la alteración magnética y eleva un factor de ponderación para las ganancias no derivadas de una fuente magnética afectada por la alteración magnética. 10. Procedimiento según la reivindicación 9, en el que, si se está produciendo un acontecimiento magnético, se atribuye a los factores para la ganancia P y la ganancia I un peso inferior y se atribuye al factor para la ganancia D un peso superior. 11. Procedimiento según la reivindicación 9 ó 10, en el que, durante una alteración magnética relativamente a largo plazo, se añade una compensación a un eje afectado de un sensor magnético para anular la alteración magnética, basándose la compensación en una medición predeterminada del efecto de la alteración magnética sobre el sensor magnético. 12. Procedimiento según cualquiera de las reivindicaciones 1 a 11, que comprende: determinar si la embarcación está planeando, basándose en las mediciones de las rpm y el cabeceo de la embarcación y ajustando las ganancias de algoritmo en tal caso para compensar el planeo. 13. Procedimiento según cualquiera de las reivindicaciones 1 a 12, que comprende: desviar la tobera basándose en la cantidad de desviación determinada a todas las velocidades sin intervención de un operario de la embarcación. 14. Procedimiento según cualquiera de las reivindicaciones 1 a 13, en el que un reglaje/compensación de la embarcación in situ antes de una maniobra se restablece tras la maniobra. 13 E04817006 03-11-2011 15. 14 E04817006 03-11-2011 E04817006 03-11-2011 16 E04817006 03-11-2011 17 E04817006 03-11-2011 18 E04817006 03-11-2011 19 E04817006 03-11-2011 E04817006 03-11-2011
Patentes similares o relacionadas:
Control de un barco propulsado por chorro de agua, del 12 de Febrero de 2014, de ROLLS-ROYCE NAVAL MARINE INC: Procedimiento para corregir el efecto negativo de una alteración sobre los datos de rumbo proporcionados por un sensor de rumbo de una embarcación, […]
Control de un barco propulsado por chorro de agua, del 18 de Junio de 2013, de ROLLS-ROYCE NAVAL MARINE INC: Procedimiento para controlar una embarcación que presenta un dispositivo de propulsión trasero y un propulsor,que comprende:
iniciar un movimiento […]
Control de un barco propulsado por chorro de agua, del 18 de Junio de 2013, de ROLLS-ROYCE NAVAL MARINE INC: Procedimiento para calcular el rumbo de una embarcación, que comprende:
adquirir un rumbo 5 de la embarcación en un instante de base;
adquirir […]
Control de un barco propulsado por chorro de agua, del 12 de Junio de 2013, de ROLLS-ROYCE NAVAL MARINE INC: Procedimiento para controlar una embarcación que presenta un dispositivo de propulsión trasero y un propulsor,que comprende:
durante por lo menos uno de entre […]
TIMON-INVERSOR DE FLUJO PARA EMBARCACIONES MARINAS, del 1 de Diciembre de 2007, de EMBARCACIONES SIRKAN S.L.: Timón-inversor de flujo para embarcaciones marinas, constituido por una pala de sección circular montada en el extremo de una carcasa tubular que envuelve […]
EMBARCACION DE SUPERFICIE CON UN SISTEMA DE PROPULSION DE CHORRO DE AGUA., del 16 de Junio de 2005, de BIRD-JOHNSON COMPANY: Una embarcación de superficie que tiene un casco que tiene una porción trasera que incluye un espejo principal de popa , un espejo intermedio […]
SISTEMA DE DIRECCION Y CAMBIO DE MARCHA PARA UNA UNIDAD NAUTICA DE PROPULSION A CHORRO., del 16 de Noviembre de 1994, de KAMEWA AB: SISTEMA DE DIRECCION Y CAMBIO DE MARCHA PARA UNA UNIDAD NAUTICA DE PROPULSION A CHORRO. UN SISTEMA DE DIRECCION Y CAMBIO DE MARCHA PARA UNA UNIDAD NAUTICA DE PROPULSION A […]
PROPULSION POR CHORRO DE AGUA PARA NAVES ACUATICAS, del 1 de Noviembre de 2007, de BECKER, KARL-JOSEF: Propulsión por chorro de agua para naves acuáticas con las siguientes características:# a) La propulsión por chorro de agua incluye una unidad de carcasa empotrable en […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 TIMON-INVERSOR DE FLUJO PARA EMBARCACIONES MARINAS, del 1 de Diciembre de 2007, de EMBARCACIONES SIRKAN S.L.: Timón-inversor de flujo para embarcaciones marinas, constituido por una pala de sección circular montada en el extremo de una carcasa tubular que envuelve […]
TIMON-INVERSOR DE FLUJO PARA EMBARCACIONES MARINAS, del 1 de Diciembre de 2007, de EMBARCACIONES SIRKAN S.L.: Timón-inversor de flujo para embarcaciones marinas, constituido por una pala de sección circular montada en el extremo de una carcasa tubular que envuelve […]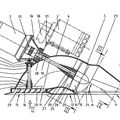 PROPULSION POR CHORRO DE AGUA PARA NAVES ACUATICAS, del 1 de Noviembre de 2007, de BECKER, KARL-JOSEF: Propulsión por chorro de agua para naves acuáticas con las siguientes características:# a) La propulsión por chorro de agua incluye una unidad de carcasa empotrable en […]
PROPULSION POR CHORRO DE AGUA PARA NAVES ACUATICAS, del 1 de Noviembre de 2007, de BECKER, KARL-JOSEF: Propulsión por chorro de agua para naves acuáticas con las siguientes características:# a) La propulsión por chorro de agua incluye una unidad de carcasa empotrable en […]