Aparato de control para bicicleta asistida por motor.
Un aparato de control (250) para una bicicleta asistida por motor (10) para detectar un par de pedaleo aplicado a un cigüeñal (48) con un sensor de fuerza de pedaleo (110),
controlar una unidad de motor (28) de la bicicleta asistida por motor (10) en un proceso de control regenerativo para cargar una batería (44) si el valor de par del par de pedaleo detectado es igual o menor que un nivel predeterminado, y controlar la unidad de motor (28) en un proceso de control de asistencia si dicho valor de par es mayor que dicho nivel predeterminado, donde dicho aparato de control (250) realiza un proceso de control transitorio de asistencia con una relación de asistencia más baja que en dicho de proceso de control de asistencia mientras dicho cigüeñal (48) efectúa un número predeterminado de revoluciones y a continuación realiza el proceso de control regenerativo si el valor de par detectado por dicho sensor de fuerza de pedaleo (110) tiene un pico igual o menor que dicho nivel predeterminado.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11182006.
Solicitante: HONDA MOTOR CO., LTD..
Nacionalidad solicitante: Japón.
Dirección: 1-1, Minami-Aoyama 2-chome,Minato-ku Tokyo 107-8556 JAPON.
Inventor/es: AOKI,KOJI, MURAKAMI,HISASHI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62M6/45 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62M PROPULSION POR EL CONDUCTOR DE VEHICULOS DE RUEDAS O DE TRINEOS; PROPULSION POR MOTOR DE TRINEOS O DE CICLOS; TRANSMISIONES ADAPTADAS ESPECIALMENTE A ESTOS VEHICULOS (disposiciones o montaje de transmisiones de vehículos en general B60K; elementos de transmisión en sí F16). › B62M 6/00 Propulsión por el conductor de vehículos de ruedas con una fuente de energía adicional, p. ej. motor de combustión o motor eléctrico. › Dispositivos de control o accionamiento con este fin.
PDF original: ES-2433671_T3.pdf
Fragmento de la descripción:
Aparato de control para bicicleta asistida por motor
Campo técnico
La presente invención se refiere a un aparato de control para una bicicleta asistida por motor que incrementa la conducibilidad de la bicicleta asistida por motor cuando la bicicleta asistida por motor conmuta de un proceso de control de asistencia a un proceso de control regenerativo.
Antecedentes de la invención La Patente japonesa número JP 3642364 B a la que se hace referencia más adelante describe que una bicicleta con potencia de asistencia es asistida energizando un motor para generar una fuerza de asistencia dependiendo de un par de pedaleo aplicado a un cigüeñal, y el motor es controlado para conmutación a un estado regenerado si un pico detectado del par de pedaleo es menor que un par de pedaleo determinado dependiendo de la velocidad de vehículo de la bicicleta.
Problemas a resolver con la invención Según la tecnología descrita en la Patente japonesa número JP 3642364 B, si el pico del par de pedaleo aplicado al cigüeñal es menor que un par de pedaleo determinado dependiendo de la velocidad de vehículo de la bicicleta asistida por motor (par de pedaleo predeterminado) , entonces el motor regenera inmediatamente potencia eléctrica y carga una batería con la potencia eléctrica regenerada. Por lo tanto, cuando se alcanza el par de pedaleo predeterminado, el cigüeñal experimenta bruscamente un rozamiento regenerativo, imponiendo una carga grande al ciclista de la bicicleta asistida por motor y haciendo que el ciclista tenga una sensación rara.
La presente invención se ha realizado en vista de los problemas de la técnica anterior. Un objeto de la presente invención es proporcionar un aparato de control para una bicicleta asistida por motor que incrementa la conducibilidad de la bicicleta asistida por motor cuando la bicicleta asistida por motor conmuta de un proceso de control de asistencia a un proceso de control regenerativo.
Medios para resolver los problemas Para lograr los objetos anteriores, según una invención expuesta en la reivindicación 1, se facilita un aparato de control (250) para una bicicleta asistida por motor (10) para detectar un par de pedaleo aplicado a un cigüeñal (48) con un sensor de fuerza de pedaleo (110) , controlar una unidad de motor (28) de la bicicleta asistida por motor (10) en un proceso de control regenerativo para cargar una batería (44) si el valor de par del par de pedaleo detectado es igual o menor que un nivel predeterminado, y controlar la unidad de motor (28) en un proceso de control de asistencia si el valor de par es mayor que el nivel predeterminado, donde el aparato de control (250) realiza un proceso de control transitorio de asistencia con una relación de asistencia más baja que en el proceso de control de asistencia mientras el cigüeñal (48) efectúa un número predeterminado de revoluciones y a continuación realiza el proceso de control regenerativo si el valor de par detectado por el sensor de fuerza de pedaleo (110) tiene un pico igual o menor que el nivel predeterminado.
Según una invención expuesta en la reivindicación 2, en el aparato de control (250) para la bicicleta asistida por motor (10) según la reivindicación 1, el aparato de control (250) opera en un modo de asistencia para realizar el proceso de control de asistencia y un modo regenerativo para realizar el proceso de control regenerativo; el aparato de control (250) incluye un determinador de modo (264) para determinar cuál del modo de asistencia y el modo regenerativo se ha de realizar; y el determinador de modo (264) determina un modo transitorio de asistencia para realizar el proceso de control transitorio de asistencia si el determinador de modo (264) detecta que el valor de par detectado por el sensor de fuerza de pedaleo (110) tiene un pico igual o menor que el nivel predeterminado después de que el modo a realizar haya conmutado del modo de asistencia al modo regenerativo.
Según una invención expuesta en la reivindicación 3, el aparato de control (250) para la bicicleta asistida por motor
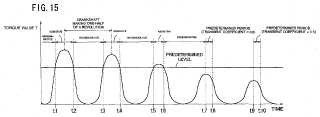
(10) según la reivindicación 2 incluye además: un detector de velocidad rotacional de cigüeñal (282) para detectar una velocidad rotacional del cigüeñal (48) con un contador para medir el tiempo durante el que el modo transitorio de asistencia continúa mientras se lleva a cabo el modo transitorio de asistencia; y una sección de establecimiento de coeficiente transitorio (280) para establecer un coeficiente transitorio para reducir la relación de asistencia cada vez que el cigüeñal (48) efectúa media revolución; donde el aparato de control (250) realiza el proceso de control transitorio de asistencia con una relación de asistencia que se reduce en base al coeficiente transitorio establecido por la sección de establecimiento de coeficiente transitorio (280) .
Según una invención expuesta en la reivindicación 4, el aparato de control (250) para la bicicleta asistida por motor
(10) según la reivindicación 2 o 3 incluye además: un detector de información de velocidad de vehículo (66) para detectar un valor de información de velocidad de vehículo que representa una velocidad de vehículo de la bicicleta
asistida por motor (10) ; y medios de decisión para determinar cuál del modo de asistencia y el modo regenerativo se ha de realizar, dependiendo del par de pedaleo y la velocidad de vehículo de la bicicleta asistida por motor (10) ; donde el determinador de modo (264) determina el modo a realizar a partir de los medios de decisión, usando el valor de par detectado por el sensor de fuerza de pedaleo (110) y el valor de información de velocidad de vehículo detectado por el detector de información de velocidad de vehículo (66) .
Según una invención expuesta en la reivindicación 5, el aparato de control (250) para la bicicleta asistida por motor
(10) según la reivindicación 4 incluye además: un detector de estado de carga (260) para detectar el estado de carga de la batería (44) ; donde los medios de decisión incluyen una pluralidad de medios de decisión proporcionados dependiendo del estado de carga de la batería (44) ; y el determinador de modo (264) determina el modo a realizar a partir de los medios de decisión que corresponde al estado de carga de la batería (44) que es detectado por el detector de estado de carga (260) .
Según una invención expuesta en la reivindicación 6, en el aparato de control (250) para la bicicleta asistida por motor (10) según la reivindicación 5, la pluralidad de medios de decisión proporcionados dependiendo del estado de carga de la batería (44) se determinan de tal manera que el nivel predeterminado sea más alto cuando el estado de carga de la batería (44) sea más bajo.
Según una invención expuesta en la reivindicación 7, en el aparato de control (250) para la bicicleta asistida por motor (10) según cualquiera de las reivindicaciones 4 a 6, los medios de decisión incluyen un mapa de decisión preestablecido.
Según una invención expuesta en la reivindicación 8, en el aparato de control (250) para la bicicleta asistida por motor (10) según cualquiera de las reivindicaciones 1 a 7, el aparato de control (250) varía el nivel predeterminado dependiendo del estado de carga de la batería (44) .
Efectos de la invención Según la invención expuesta en la reivindicación 1, si el valor de par detectado por el sensor de fuerza de pedaleo tiene un pico igual o menor que el nivel predeterminado, se lleva a cabo el proceso de control transitorio de asistencia y a continuación cambia al proceso de control regenerativo. En consecuencia, se evita que el cigüeñal se ralentice bruscamente y se evita que la carga impuesta al conductor de la bicicleta asistida por motor aumente bruscamente. El proceso de control regenerativo empieza así a realizarse suavemente sin hacer que el ciclista tenga una sensación extraña.
Según la invención expuesta en la reivindicación 2, el determinador de modo determina que se ha de realizar un modo transitorio de asistencia para realizar el proceso de control transitorio de asistencia si el valor de par detectado por el sensor de fuerza de pedaleo tiene un pico igual o menor que el nivel predeterminado después de que el modo a realizar haya conmutado del modo de asistencia al modo regenerativo. Por lo tanto, aunque se determine que el modo regenerativo sea el modo a realizar, la bicicleta asistida por motor es asistida de forma continua a condición de que se determine el modo transitorio de asistencia.
Según la invención expuesta en la reivindicación 3, cuando se genera una fuerza de pedaleo por media revolución del cigüeñal, un coeficiente transitorio para reducir la relación de asistencia se puede establecer... [Seguir leyendo]
Reivindicaciones:
1. Un aparato de control (250) para una bicicleta asistida por motor (10) para detectar un par de pedaleo aplicado a un cigüeñal (48) con un sensor de fuerza de pedaleo (110) , controlar una unidad de motor (28) de la bicicleta asistida por motor (10) en un proceso de control regenerativo para cargar una batería (44) si el valor de par del par de pedaleo detectado es igual o menor que un nivel predeterminado, y controlar la unidad de motor (28) en un proceso de control de asistencia si dicho valor de par es mayor que dicho nivel predeterminado, donde dicho aparato de control (250) realiza un proceso de control transitorio de asistencia con una relación de asistencia más baja que en dicho de proceso de control de asistencia mientras dicho cigüeñal (48) efectúa un número predeterminado de revoluciones y a continuación realiza el proceso de control regenerativo si el valor de par detectado por dicho sensor de fuerza de pedaleo (110) tiene un pico igual o menor que dicho nivel predeterminado.
2. El aparato de control (250) para la bicicleta asistida por motor (10) según la reivindicación 1, donde dicho aparato de control (250) opera en un modo de asistencia para realizar el proceso de control de asistencia y un modo regenerativo para realizar el proceso de control regenerativo;
dicho aparato de control (250) incluye un determinador de modo (264) para determinar cuál del modo de asistencia y el modo regenerativo se ha de realizar; y
dicho determinador de modo (264) determina que un modo transitorio de asistencia para realizar el proceso de control transitorio de asistencia se ha de realizar si dicho determinador de modo (264) detecta que el valor de par detectado por dicho sensor de fuerza de pedaleo (110) tiene un pico igual o menor que dicho nivel predeterminado después de que el modo a realizar haya conmutado del modo de asistencia al modo regenerativo.
3. El aparato de control (250) para la bicicleta asistida por motor (10) según la reivindicación 2, incluyendo además:
un detector de velocidad rotacional de cigüeñal (282) para detectar la velocidad rotacional de dicho cigüeñal (48) con un contador para medir un tiempo durante el que dicho modo transitorio de asistencia continúa mientras se realiza el modo transitorio de asistencia; y
una sección de establecimiento de coeficiente transitorio (280) para establecer un coeficiente transitorio para reducir dicha relación de asistencia cada vez que dicho cigüeñal (48) efectúa media revolución;
donde dicho aparato de control (250) realiza el proceso de control transitorio de asistencia con una relación de asistencia que se reduce en base al coeficiente transitorio establecido por dicha sección de establecimiento de coeficiente transitorio (280) .
4. El aparato de control (250) para la bicicleta asistida por motor (10) según la reivindicación 2 o 3, incluyendo además:
un detector de información de velocidad de vehículo (66) para detectar un valor de información de velocidad de vehículo que representa una velocidad de vehículo de dicha bicicleta asistida por motor (10) ; y
medios de decisión para determinar cuál del modo de asistencia y el modo regenerativo se ha de realizar, dependiendo de dicho par de pedaleo y la velocidad de vehículo de dicha bicicleta asistida por motor (10) ;
donde dicho determinador de modo (264) determina el modo a realizar a partir de dichos medios de decisión, usando el valor de par detectado por dicho sensor de fuerza de pedaleo (110) y el valor de información de velocidad de vehículo detectado por dicho detector de información de velocidad de vehículo (66) .
5. El aparato de control (250) para la bicicleta asistida por motor (10) según la reivindicación 4, incluyendo además:
un detector de estado de carga (260) para detectar el estado de carga de dicha batería (44) ;
donde dichos medios de decisión incluyen una pluralidad de medios de decisión proporcionados dependiendo del estado de carga de dicha batería (44) ; y
dicho determinador de modo (264) determina el modo a realizar a partir de los medios de decisión que corresponde al estado de carga de dicha batería (44) que es detectado por dicho detector de estado de carga (260) .
6. El aparato de control (250) para la bicicleta asistida por motor (10) según la reivindicación 5, donde dicha pluralidad de medios de decisión proporcionados dependiendo del estado de carga de dicha batería (44) están determinados de tal manera que dicho nivel predeterminado sea más alto cuando el estado de carga de dicha batería (44) sea más bajo.
7. El aparato de control (250) para la bicicleta asistida por motor (10) según cualquiera de las reivindicaciones 4 a 6, donde dichos medios de decisión incluyen un mapa de decisión preestablecido.
8. El aparato de control (250) para la bicicleta asistida por motor (10) según cualquiera de las reivindicaciones 1 a 7, donde dicho aparato de control (250) varía dicho nivel predeterminado dependiendo del estado de carga de dicha batería (44) .
Patentes similares o relacionadas:
Procedimiento de control y dispositivo para la regulación del motor eléctrico para la ayuda para el empuje de una bicicleta eléctrica, del 8 de Julio de 2020, de ROBERT BOSCH GMBH: Procedimiento de control para la regulacion de un motor electrico para la ayuda para el empuje de una bicicleta electrica que comprende, […]
Procedimiento y dispositivo para el control de un vehículo a pedales, del 8 de Abril de 2020, de ROBERT BOSCH GMBH: Procedimiento para controlar el motor de un vehículo a pedales, donde se prevé que el motor tenga un modo de asistencia, que asista al conductor durante […]
 Remolque motorizado que contiene un dispositivo de control de motor, del 29 de Enero de 2020, de K-RYOLE: Un remolque destinado para acoplarse a una bicicleta, dicho remolque contiene:
- un chasis que define un eje longitudinal AA y que comprende […]
Remolque motorizado que contiene un dispositivo de control de motor, del 29 de Enero de 2020, de K-RYOLE: Un remolque destinado para acoplarse a una bicicleta, dicho remolque contiene:
- un chasis que define un eje longitudinal AA y que comprende […]
Kit de doble tracción para bicicleta y bicicleta que lo incorpora, del 17 de Enero de 2020, de UNIVERSIDAD DE CASTILLA-LA MANCHA: 1. Kit de doble tracción para bicicleta, caracterizado porque comprende: un primer motor eléctrico configurado para, mediante su instalación en el buje de la […]
Procedimiento de control para un motor de accionamiento, aparato de control y bicicleta, del 1 de Enero de 2020, de ROBERT BOSCH GMBH: Procedimiento de control para un motor de accionamiento de un vehículo de dos ruedas , en el que el vehículo de dos ruedas está configurado para […]
 Bastidor para vehículos asistidos eléctricamente y vehículos asistidos eléctricamente, del 31 de Julio de 2019, de Xue, Hong: Un bastidor para un vehículo asistido eléctricamente, que comprende un tubo inferior y un tubo central conectados entre sí, en donde un controlador […]
Bastidor para vehículos asistidos eléctricamente y vehículos asistidos eléctricamente, del 31 de Julio de 2019, de Xue, Hong: Un bastidor para un vehículo asistido eléctricamente, que comprende un tubo inferior y un tubo central conectados entre sí, en donde un controlador […]
BICICLETA ELÉCTRICA PARA FRENADA REGENERATIVA, del 7 de Mayo de 2019, de ZUMA INNOVATION S.L: 1. Bicicleta eléctrica provista de pedales para aportación de potencia por el usuario (U) a la rueda trasera por medio de una transmisión , y de […]
SISTEMA DE REGULACIÓN DE MODOS DE CONDUCCIÓN DE VEHÍCULOS ELÉCTRICOS DE MOVILIDAD PERSONAL, del 14 de Febrero de 2019, de CECOTEC RESEARCH & DEVELOPMENT, SL: 1. Sistema de regulación de modos de conducción de vehículos eléctricos caracterizado por estar comprendido por: al menos un motor eléctrico , al menos una batería […]