Predicción de la trayectoria de una aeronave.
Procedimiento implementado por ordenador para proporcionar una descripcion de la intencion de una aeronave(114,
215) expresada usando un lenguaje formal, comprendiendo el procedimiento:
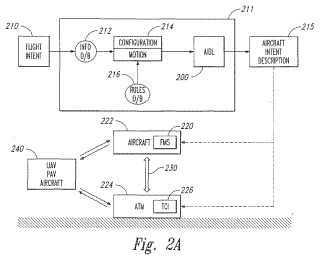
recibir informacion (210) que define como la aeronave (222) ha volado durante un intervalo de tiempo, yalmacenar la informacion en una base de datos de informacion (212);
derivar una serie de instrucciones (214) a partir de la informacion almacenada, en el que el conjunto deinstrucciones comprende instrucciones de configuracion (270) que describen la configuracion aerodinamicade la aeronave y las instrucciones de movimiento (260) que describen el movimiento de la aeronave;asegurar que el conjunto de instrucciones cumplen con un conjunto de reglas almacenadas en una base dedatos de reglas (216), confirmando asi que las instrucciones de configuracion definen la configuracionaerodinamica de la aeronave tal como se requiere y que las instrucciones de movimiento cierran los gradosde libertad de ecuaciones de movimiento utilizadas para describir el movimiento de la aeronave durante elintervalo de tiempo; y
expresar el conjunto de instrucciones utilizando el lenguaje formal (200), proporcionando de este modo ladescripcion de la intencion de la aeronave, y en el quelas instrucciones se clasifican en grupos, de tal manera que las instrucciones se distribuyen primero endiferentes grupos de acuerdo con su efecto y, a continuacion, las instrucciones incompatibles se agrupandentro de cada grupo, y en el que la derivacion del conjunto de instrucciones comprende asegurar que elconjunto de instrucciones solo contiene una instruccion de cada grupo,
caracterizado por que
la derivacion del conjunto de instrucciones comprende la identificacion a partir de la informacion almacenada,de informacion que determina el movimiento de la aeronave y proporcionar instrucciones de movimientobasadas en esa informacion relacionada con el movimiento, a saber, mediante la identificacion de lainformacion relativa al movimiento lateral, al movimiento vertical y a la velocidad; y
asegurar que hay tres instrucciones de movimiento, cerrando cada instruccion de movimiento un grado delibertad.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07380259.
Solicitante: THE BOEING COMPANY.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 100 NORTH RIVERSIDE PLAZA CHICAGO, IL 60606-1596 ESTADOS UNIDOS DE AMERICA.
Inventor/es: Querejeta,Carlos, Vilaplana Ruiz,Miguel A, Gallo,Eduardo, López Leones,Javier, Navarro Félix,Francisco A.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05D1/10 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo en las tres dimensiones simultáneamente (G05D 1/12 tiene prioridad).
- G08G5/04 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › Sistemas anticolisión.
PDF original: ES-2385403_T3.pdf
Fragmento de la descripción:
Predicción de la trayectoria de una aeronave Campo de la invención La presente invención se refiere a la predicción de la trayectoria de una aeronave, por ejemplo durante la gestión de tráfico aéreo. En particular, la presente invención reside en un procedimiento de predicción de la trayectoria de una aeronave utilizando la previsión de la aeronave expresada utilizando un lenguaje formal.
Antecedentes de la invención La capacidad de predecir la trayectoria de una aeronave es útil por varias razones.
La gestión del tráfico aéreo (ATM) se beneficiaría de una mayor capacidad para predecir la trayectoria de una aeronave. La gestión del tráfico aéreo es responsable de la separación segura de las aeronaves, una tarea muy exigente en un espacio aéreo congestionado, tal como alrededor de los aeropuertos. Las herramientas de apoyo a las decisiones de la ATM basadas en las predicciones de la trayectoria exacta podrían permitir que se gestione un mayor volumen de aeronaves manteniendo al mismo tiempo la seguridad. Por trayectoria se entiende una descripción de cuatro dimensiones de la trayectoria de la aeronave. La descripción puede ser la evolución del estado de la aeronave con el tiempo, donde el estado puede incluir la posición del centro de masa de la aeronave y otros aspectos de su movimiento como la velocidad, la actitud y el peso. Este beneficio es especialmente importante cuando la ATM está operando en aeropuertos y sus alrededores. Como la demanda de franjas horarias en los aeropuertos aumenta, la ATM se encuentra bajo una presión constante para aumentar la capacidad mediante la disminución de la separación entre aeronaves: una mayor precisión en la predicción de las trayectorias de las aeronaves permite que esto se lleve a cabo sin comprometer la seguridad. Además, una mayor previsibilidad en las trayectorias de las aeronaves permite que los tiempos de llegada se determinen con mayor precisión lo que permite una mejor coordinación con las operaciones terrestre.
En la práctica de ATM actual, las aeronaves deben volar las rutas normalmente establecidas. Por ejemplo, cuando se aproximan y parten desde un aeropuerto, suelen solicitarse a las aeronaves volar en un STAR (Ruta de Llegada a la Terminal Estándar) y SID (Partida por Instrumentos Estándar) , respectivamente. Sin embargo, las compañías aéreas están solicitando una mayor flexibilidad para volar de acuerdo a sus preferencias, de modo que éstas puedan alcanzar sus objetivos de negocio. Además, existe una creciente presión sobre el sistema ATM para facilitar la reducción del impacto ambiental de las operaciones de aeronaves. Como resultado de lo anterior, el sistema ATM requiere una capacidad de predecir trayectorias preferidas por el operario así como trayectorias que minimicen el impacto sobre el medio ambiente, principalmente en términos de ruido y emisiones. Además, el sistema ATM debe ser capaz de intercambiar descripciones de tales trayectorias con los operadores a fin de llegar a una solución coordinada, sin conflictos al problema de tráfico.
La capacidad de predecir una trayectoria de una aeronave también será de beneficio para el manejo de vehículos autónomos, como los vehículos aéreos no tripulados (UAVs) , por ejemplo, en la programación de planes de vuelo para vehículos aéreos no tripulados, así como en el mando y la solución de conflictos de sus trayectorias.
45 Para predecir la trayectoria de la aeronave sin ambigüedades, hay que resolver un conjunto de ecuaciones diferenciales que modelan las condiciones tanto de comportamiento de la aeronave como de la atmósfera. El proceso de cálculo requiere entradas correspondientes a la previsión de la aeronave.
La previsión de la aeronave debe ser distinguida de la previsión de vuelo. La previsión de vuelo puede ser considerada como una generalización del concepto de un plan de vuelo, y así reflejarán los requisitos operacionales, tales como la ruta prevista y preferencias del operador. En general, la previsión de vuelo define de forma no ambigua la trayectoria de una aeronave. Dicho de otro modo, es probable que sean muchas las trayectorias de aeronaves que satisfagan una previsión de vuelo determinada. Así, la previsión de vuelo puede ser considerada como un modelo básico en el que faltan los detalles específicos necesarios para calcular una trayectoria sin ambigüedades.
55 Por ejemplo, las instrucciones a seguir durante una STAR o una SID corresponderían a un ejemplo de la previsión de vuelo. Además, las preferencias de aeronave también pueden formar un ejemplo de la previsión de vuelo. Para determinar la previsión de la aeronave, los casos de intento de vuelo como un procedimiento SID, las preferencias operativas de la aerolínea y el proceso de toma de decisión real del piloto deben ser combinados. Esto se debe a que la previsión de la aeronave comprende un conjunto estructurado de instrucciones que se utilizan en una infraestructura informática de la trayectoria para proporcionar una trayectoria inequívoca. Las instrucciones deben incluir detalles de la configuración de la aeronave (por ejemplo, el despliegue de ruedas de aterrizaje) , y los procedimientos que deben seguirse durante las maniobras y el vuelo normal (por ejemplo, el seguimiento de un radio de giro determinado o mantener una velocidad de aire determinada) . Estas instrucciones capturan los 65 comandos básicos y modos de orientación a disposición del piloto y el sistema de gestión de vuelo de la aeronave para dirigir la operación de la aeronave. Así, la previsión de la aeronave puede ser considerada como una abstracción de la forma en que se ordena a una aeronave a comportarse por el piloto y/o sistema de gestión de vuelo. Por supuesto, el proceso de toma de decisión del piloto se ve influenciado por los procedimientos requeridos, por ejemplo, como la obligación de seguir una STAR/SID o para cumplir con los procedimientos operacionales de aeronave.
La previsión de la aeronave se expresa utilizando un conjunto de parámetros que se presentan con el fin de permitir ecuaciones del movimiento que hay que resolver. La teoría de lenguajes formales se puede utilizar para poner en práctica esta fórmula: un lenguaje de descripción de intento de aeronave ofrece el conjunto de instrucciones y las reglas que rigen las combinaciones permitidas que expresan la previsión de las aeronaves, y así permitir una predicción de la trayectoria de la aeronave.
La figura 1 muestra una infraestructura común utilizada en el cálculo de dicha trayectoria de la aeronave, a saber, una infraestructura de cálculo trayectoria o TCI. El informática es ejecutado por un motor de trayectoria. El motor de trayectoria requiere como entradas tanto la descripción de la previsión de la aeronave que se ha descrito anteriormente y también el estado inicial de la aeronave. El motor de trayectoria proporciona como salida una descripción de la trayectoria calculada para la aeronave. Para producir dicha salida, el motor de la trayectoria utiliza dos modelos: un modelo de rendimiento de la aeronave y un modelo terrestre.
El modelo de rendimiento de la aeronave proporciona los valores de los aspectos de rendimiento de las aeronaves requeridos por el motor de la trayectoria para la integración de las ecuaciones de movimiento. Estos valores dependen del tipo de aeronave para la cual se calcula la trayectoria, el estado de movimiento actual de la aeronave, (posición, velocidad, peso, etc.) y las condiciones atmosféricas actuales locales. Además, los valores de rendimiento pueden depender de la operación prevista de la aeronave, es decir, sobre la previsión de la aeronave. Por ejemplo, un motor de trayectoria puede utilizar el modelo de funcionamiento de las aeronaves para proporcionar un valor del índice instantánea de descenso correspondiente a un determinado peso de la aeronave, las condiciones atmosféricas (altitud de presión y temperatura) y el horario previsto de velocidad (por ejemplo velocidad del aire calibrada constante) . El motor de trayectoria también solicitará a partir del modelo de rendimiento de la aeronave los valores de las limitaciones aplicables a fin de asegurar que el movimiento de la aeronave se mantiene dentro de la envolvente de vuelo. El modelo de rendimiento de la aeronave también es responsable de proporcionar la TE con otros aspectos relacionados con el rendimiento que son intrínsecos a la aeronave, tales como los tiempos de desplegado del alerón y del tren de aterrizaje.
El modelo terrestre proporciona información relativa a las condiciones ambientales, tales como el estado de la atmósfera, las condiciones atmosféricas,... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento implementado por ordenador para proporcionar una descripción de la intención de una aeronave (114, 215) expresada usando un lenguaje formal, comprendiendo el procedimiento:
recibir información (210) que define cómo la aeronave (222) ha volado durante un intervalo de tiempo, y almacenar la información en una base de datos de información (212) ; derivar una serie de instrucciones (214) a partir de la información almacenada, en el que el conjunto de instrucciones comprende instrucciones de configuración (270) que describen la configuración aerodinámica de la aeronave y las instrucciones de movimiento (260) que describen el movimiento de la aeronave; asegurar que el conjunto de instrucciones cumplen con un conjunto de reglas almacenadas en una base de datos de reglas (216) , confirmando así que las instrucciones de configuración definen la configuración aerodinámica de la aeronave tal como se requiere y que las instrucciones de movimiento cierran los grados de libertad de ecuaciones de movimiento utilizadas para describir el movimiento de la aeronave durante el intervalo de tiempo; y expresar el conjunto de instrucciones utilizando el lenguaje formal (200) , proporcionando de este modo la descripción de la intención de la aeronave, y en el que las instrucciones se clasifican en grupos, de tal manera que las instrucciones se distribuyen primero en diferentes grupos de acuerdo con su efecto y, a continuación, las instrucciones incompatibles se agrupan dentro de cada grupo, y en el que la derivación del conjunto de instrucciones comprende asegurar que el conjunto de instrucciones sólo contiene una instrucción de cada grupo, caracterizado por que la derivación del conjunto de instrucciones comprende la identificación a partir de la información almacenada, de información que determina el movimiento de la aeronave y proporcionar instrucciones de movimiento basadas en esa información relacionada con el movimiento, a saber, mediante la identificación de la información relativa al movimiento lateral, al movimiento vertical y a la velocidad; y asegurar que hay tres instrucciones de movimiento, cerrando cada instrucción de movimiento un grado de libertad.
2. Procedimiento según la reivindicación 1, en el que la derivación del conjunto de instrucciones comprende la identificación a partir de la información almacenada, de información relativa a cómo la aeronave debe configurarse y proporcionar instrucciones de configuración basadas en esa información relacionada con la configuración.
3. Procedimiento según la reivindicación 2, que comprende la identificación de información relativa a dispositivos de
alta sustentación, tren de aterrizaje o frenos de velocidad, y proporcionar una instrucción relacionada con la alta sustentación, relacionada con el tren de aterrizaje o relacionada con los frenos de velocidad, respectivamente.
4. Procedimiento según la reivindicación 3, en el que se garantiza que el conjunto de instrucciones cumple con un conjunto de reglas almacenadas en una base de datos de reglas, confirmando así que las instrucciones de configuración definen la configuración aerodinámica de la aeronave tal como se requiere, comprendiendo asegurar que el conjunto de instrucciones incluye una y sólo una de cada instrucción relacionada con la alta elevación, una instrucción relacionada con el tren de aterrizaje y una instrucción relacionada con los frenos de velocidad.
5. Procedimiento según cualquier reivindicación anterior, que comprende asegurar que el conjunto de instrucciones
45 cumple con un conjunto de reglas almacenadas en una base de datos de reglas, confirmando así que las instrucciones de movimiento cierran los grados de libertad de ecuaciones de movimiento utilizadas para describir el movimiento de la aeronave comprende asegurar que las instrucciones no proporcionan requisitos en conflicto.
6. Procedimiento según cualquier reivindicación anterior, en el que recibir información comprende la recepción de información relativa a las preferencias del operador de la aeronave, cómo un piloto tiene la intención de volar la aeronave, o los procedimientos de salida/llegada que deben seguirse durante el vuelo.
7. Procedimiento según cualquier reivindicación anterior, en el que se expresa el conjunto de instrucciones utilizando un lenguaje formal comprende proporcionar la información necesaria, o referencias a dónde se puede encontrar la
55 información, para resolver ecuaciones de movimiento que describen el vuelo de la aeronave, y así calcular la trayectoria de la aeronave.
8. Procedimiento según la reivindicación 7, en el que proporcionar referencias a dónde se puede encontrar la información comprende proporcionar referencias a una base de datos de almacenamiento de información relativa al rendimiento de la aeronave o de las condiciones atmosféricas.
9. Procedimiento según cualquier reivindicación anterior, que comprende proporcionar una representación gráfica del conjunto de instrucciones expresadas usando un lenguaje formal.
65 10. Procedimiento implementado por ordenador de predicción de la trayectoria de una aeronave, que comprende: leer datos que proporcionan una descripción de la intención de la aeronave (114) expresada usando un lenguaje formal, correspondiendo los datos a una descripción de la intención de la aeronave, proporcionada de acuerdo con cualquier reivindicación anterior; resolver ecuaciones de movimiento que definen el movimiento de la aeronave utilizando dichos datos y con referencia a un modelo de rendimiento de la aeronave (118) y un modelo de la Tierra (120) ; y proporcionar una descripción de la trayectoria predicha (122) .
11. Procedimiento según la reivindicación 10, que comprende proporcionar una representación gráfica de la trayectoria predicha. 10
12. Procedimiento implementado por ordenador de gestión del tráfico aéreo, que comprende:
predecir la trayectoria de una aeronave según la reivindicación 10 u 11; y comparar las trayectorias predichas para identificar conflictos potenciales. 15
13. Procedimiento según la reivindicación 12, que también comprende resolver conflictos advirtiendo a la aeronave de los cambios necesarios para su intención de la aeronave.
14. Procedimiento para evitar colisiones de aeronaves, que comprende:
una aeronave que predice su trayectoria según la reivindicación 10 u 11; recibir un conjunto de instrucciones expresadas en un lenguaje formal (114) tal como se proporcionan según el procedimiento según cualquiera de las reivindicaciones 1 a 9 que se relacionan con la intención de la aeronave de otra aeronave;
predecir la trayectoria de la otra aeronave según la reivindicación 10 u 11; y comparar las dos trayectorias predichas para identificar cualquier conflicto en las trayectorias.
Patentes similares o relacionadas:
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Métodos y aparatos para sistema de transporte aéreo distribuido, del 27 de Mayo de 2020, de Sunlight Aerospace Inc: Un método para el transporte aéreo distribuido, que comprende: la provisión de un vehículo de transporte aéreo con un ala y una envergadura, con capacidad para transportar […]
Comunicaciones entre robots móviles de medio acuático, del 6 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un sistema robótico de medio acuático, que comprende: - una estación de control ; - un robot submarino que tiene un cuerpo, una […]
Procedimiento y dispositivo para determinar parámetros de medición inerciales, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al […]
Procedimiento automático de asistencia al aterrizaje de una aeronave, del 22 de Abril de 2020, de Safran Electronics & Defense: Procedimiento de asistencia al aterrizaje de una aeronave en una pista de aterrizaje desde un punto de retorno (A) hasta un punto final (D) en el que la aeronave […]
Módulo de función de seguridad para un vehículo, del 12 de Febrero de 2020, de MBDA Deutschland GmbH: Módulo de función de seguridad para un vehículo , que comprende: una unidad de determinación de estado que está configurada […]
Procedimiento y dispositivo de navegación autónoma, del 1 de Enero de 2020, de ALERION TECHNOLOGIES, S.L: Un procedimiento de navegación autónoma para rastrear objetos de una turbina eólica, comprendiendo el procedimiento: - calibrar un sensor de visión artificial y un sensor […]
Procedimiento y sistema para el guiado, en la fase terminal, de un misil interceptor hacia un objetivo aéreo móvil, del 11 de Diciembre de 2019, de MBDA FRANCE: Procedimiento para el guiado, en la fase terminal de un misil interceptor hacia un objetivo aéreo, incluyendo dicho misil interceptor: · instrumentos de abordo […]