MÉTODO DE DISEÑO GEOMÉTRICO DE MALLAS ESPACIALES MEDIANTE SUPERFICIES NURBS.
Un método para obtener un diseño de la geometría de una malla espacial formada por una pluralidad L de entidades lineales l',
caracterizado porque comprende las etapas de: elegir tres puntos (C00 C0n C{n0}) en un plano que define un triángulo; elegir un punto (O) ajeno a ese plano; elegir un orden de complejidad n, donde n es un número natural mayor o igual que 1; calcular un conjunto de puntos de control Cij en dicho triángulo que dependen de n y de los tres puntos elegidos (C00 C0n Cn0); elegir unos pesos {la}ij, donde cada uno de estos pesos se relaciona con un punto de control Cij; transformar el conjunto de puntos de control Cij en una pluralidad de puntos Pij que definen un poliedro de control; obtener una superficie NURBS a partir de dicho poliedro de control; dentro del plano definido por dichos puntos (C00 C0n Cn0), definir un entramado como una pluralidad L de lados l'; transformar dicha pluralidad L de lados l en una pluralidad de entidades lineales l' constitutivas de dicha malla espacial. Estructura mallada. Programa informático
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201100375.
Solicitante: UNIVERSIDAD DE CANTABRIA.
Nacionalidad solicitante: España.
Provincia: CANTABRIA.
Inventor/es: MANCHADO DEL VAL,CRISTINA, ARIAS FERNANDEZ,RUBEN, OTERO GONZALEZ,CESAR ANTONIO.
Fecha de Solicitud: 28 de Marzo de 2011.
Fecha de Publicación: .
Fecha de Concesión: 10 de Febrero de 2012.
Clasificación PCT:
- E04B1/19 CONSTRUCCIONES FIJAS. › E04 EDIFICIOS. › E04B ESTRUCTURA GENERAL DE LOS EDIFICIOS; MUROS, p. ej. TABIQUES; TEJADOS; TECHOS; SUELOS; AISLAMIENTO Y OTRAS PROTECCIONES DE LOS EDIFICIOS (estructuras de marcos para vanos de puertas, ventanas o similares E06B 1/00). › E04B 1/00 Construcciones en general; Estructuras que no se limitan a los muros, p. ej. tabiques, pisos, techos, ni tejados (andamiajes, encofrados E04G; estructuras adaptadas únicamente a edificios para usos particulares, proyecto general de los edificios, p. ej. coordinación modular E04H; elementos particulares de los edificios, ver los grupos correspondientes a estos elementos). › Estructuras de esqueleto tridimensional.
- G06T17/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › modelado 3D mediante gráficos de computdor.
Fragmento de la descripción:
Método de diseño geométrico de mallas espaciales mediante superficies NURBS.
Campo de la invención
La presente invención pertenece al campo de la arquitectura e ingeniería civil, y más concretamente al diseño de mallas de estructuras espaciales.
Antecedentes de la invención
En el contexto de la arquitectura y la ingeniería civil, una malla espacial se define como una estructura espacial compuesta por barras, las cuales son las responsables de la estabilidad y por lo tanto soportan las cargas de la estructura. La figura 1 muestra un ejemplo de una malla espacial, vista desde varias perspectivas.
Así mismo, en el contexto de la computación gráfica, una superficie NURBS (del inglés, Non Uniform Rational B-splines) se define como un tipo de superficie definida matemáticamente por la división de dos polinomios completos en dos variables independientes u y v. Dichos polinomios pueden estar escritos en la base de Berstein, de modo que las componentes de una NURBS en esa base las forman sus puntos de control y sus respectivos pesos.
Las superficies NURBS tienen una gran aplicación en el diseño por computador, industrial, aeronáutico y otros, debido a la multitud de formas y complejidad a las que pueden adaptar dichas superficies. Dichos campos de conocimiento necesitan de la materialización lo más exactamente posible de la superficie, a diferencia de lo que sucede en estructuras arquitectónicas, donde se obtiene una aproximación discreta, debido normalmente a problemas de escala y de costes de construcción. Aunque no sólo el campo de la construcción necesita de estructuras discretas, basadas en superficies continuas.
El diseño geométrico de una malla espacial trata de definir la posición y longitud de todas y cada una de las barras que componen una estructura. Dichas barras quedan idealizadas como segmentos de recta para que, en posteriores etapas de un proyecto, puedan ser diseñadas estructuralmente, fabricadas y finalmente puestas en obra. Por tanto, el diseño geométrico es un paso esencial en la obtención de una estructura real.
Existen varios procedimientos para diseñar diferentes tipos de mallas espaciales a diferentes tipos de superficies, basados en propiedades geométricas de las superficies a las que se adaptan, y son todos ellos procedimientos requeridos por diseñadores a la hora de concretar técnicamente un proyecto. En ningún caso se obtiene la superficie matemática, a la que se adapta la malla, sino una aproximación discreta de la misma.
Un ejemplo de este tipo de estructuras se define en la patente estadounidense US 2682235. En este documento se define una malla espacial que se adapta a una esfera, mediante una subdivisión de la misma según arcos máxi- mos.
Otro trabajo singular fue el realizado por Joseph D. Clinton (NASA CONTRACTOR REPORT, CR-1734, Advanced Structural Geometry Studies, Part I - Polyhedral Subdivisión Concepts for Structural Applications) que realiza una subdivisión diferente para definir otra malla espacial sobre una esfera.
Por otra parte, César Otero y otros en CR-Tangent Meshes (Journal of the International Association for Shell and Spatial Structures: IASS, Vol. 41 (2000) n. 132) describen un método para diseñar geométricamente una estructura espacial desde un plano. En concreto, el método permite el diseño para superficies cuádricas elípticas.
El principal problema derivado del intento de construir una malla espacial, es que se necesita definir los elementos básicos de tipo barra: posición, ángulo, longitud, etc. Dicha definición necesita de un estudio geométrico tridimensional complicado, para realizar mallas adaptadas a superficies complejas. Por otra parte, la aplicación de métodos ya conocidos, que puedan ofrecer una solución, limitan el diseño de las mallas a ciertos tipos de superficie estudiados.
El intentar seleccionar formas de superficie nuevas, y más complejas, hace que la dificultad geométrica crezca, así que esto puede ser una seria razón para que el diseñador no opte por el diseño que desea, sino por la solución conocida.
Por otra parte, el artículo Weighted radial displacement: A geometric look at Bézier conics and quadrics. Computer Aided Geometric Design Vol.17, 2000, pp 267-289, relaciona las cuádricas como superficies NURBS de orden 2 con un plano, mediante un artificio que describen los autores, Javier Sánchez-Reyes y Marco Paluszny, dentro del campo del diseño geométrico asistido por computador. Su objetivo es obtener un procedimiento para identificar parches sobre cuádricas.
Sin embargo, actualmente el diseñador de una malla espacial lo hace de forma manual. No se conoce ninguna herramienta que permita diseñar a medida mallas espaciales.
Resumen de la invención
La presente invención trata de resolver los inconvenientes mencionados anteriormente relativos al diseño de estructuras, mediante un método que permite simplificar el problema tridimensional de una malla espacial, a un entramado definido en un plano. El método ofrece solución para superficies NURBS de orden n, es decir, de cualquier orden. En comparación con superficies NURBS de orden 2, las de orden n permiten mayor libertad de diseño.
Concretamente, en un primer aspecto de la presente invención, se proporciona un método para obtener un diseño de la geometría de una malla espacial formada por una pluralidad de entidades lineales. El método comprende las etapas de:
- elegir tres puntos en un plano que define un triángulo;
- elegir un punto ajeno a ese plano;
- elegir un orden de complejidad n, donde n es un número natural mayor o igual que 1;
- calcular un conjunto de puntos de control en dicho triángulo que dependen de n y de los tres puntos elegidos;
- elegir unos pesos, cada uno de los cuales se relaciona con un punto de control;
- transformar el conjunto de puntos de control en una pluralidad de puntos que definen un poliedro de control;
- obtener una superficie NURBS a partir de ese poliedro de control;
- dentro del plano definido por los tres puntos elegidos en la primera etapa, definir un entramado como una pluralidad de lados;
- transformar esa pluralidad de lados en una pluralidad de entidades lineales constitutivas de la malla espacial objeto del diseño.
Preferentemente, la etapa de calcular un conjunto de puntos de control en el triángulo viene dado por la expresión:

En una posible realización, el punto ajeno al plano puede ser finito, es decir, definido por sus coordenadas. Alternativamente, ese punto puede estar en el infinito, es decir, definido por una dirección.
Si ese punto es finito, los pesos se eligen libremente, mientras que si el punto es infinito, los pesos valen todos 1.
Preferentemente, la etapa de transformar el conjunto de puntos de control Cij en una pluralidad de puntos Pij que definen un poliedro de control, viene dada por la expresión:
Preferentemente, la etapa de obtener una superficie NURBS a partir de dicho poliedro de control, viene dada por la expresión:
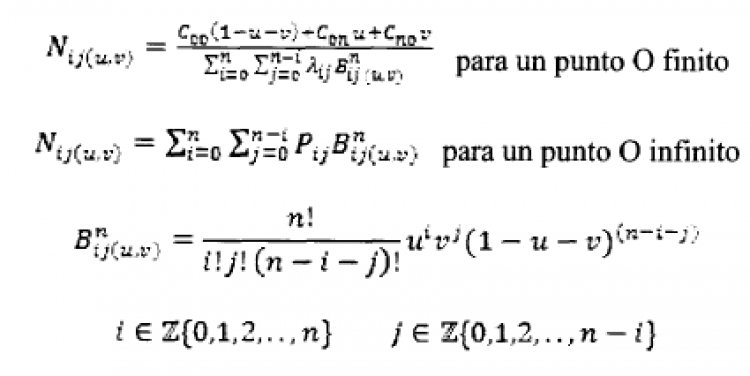
donde (u,v) son las coordenadas baricéntricas del triángulo definido por los puntos del plano inicial, C00 C0n Cn0.
La etapa de transformar la pluralidad de lados en una pluralidad de entidades lineales constitutivas de la malla espacial objeto del diseño geométrico, se realiza de la siguiente forma: para cada lado:
- obtener las coordenadas (u v) de su primer extremo;
- a partir de dichas coordenadas (u v), calcular el punto Nij (u,v);
- obtener las coordenadas (u v) de su segundo extremo;
- a partir de dichas coordenadas (u v), calcular el punto Nij (u,v);
- siendo la entidad lineal formada...
Reivindicaciones:
1. Un método para obtener un diseño de la geometría de una malla espacial formada por una pluralidad L de entidades lineales l', caracterizado por que comprende las etapas de:
- elegir tres puntos (C00 C0n Cn0) en un plano que define un triángulo;
- elegir un punto (O) ajeno a ese plano;
- elegir un orden de complejidad n, donde n es un número natural mayor o igual que 1;
- calcular un conjunto de puntos de control Cij en dicho triángulo que dependen de n y de los tres puntos elegidos (C00 C0n Cn0)
- elegir unos pesos λij, donde cada uno de estos pesos se relaciona con un punto de control Cij;
- transformar el conjunto de puntos de control Cij en una pluralidad de puntos Pij que definen un poliedro de con- trol;
- obtener una superficie NURBS a partir de dicho poliedro de control;
- dentro del plano definido por dichos puntos (C00 C0n Cn0), definir un entramado como una pluralidad L de lados l;
- transformar dicha pluralidad L de lados l en una pluralidad de entidades lineales l' constitutivas de dicha malla espacial.
2. El método según la reivindicación 1, donde dicha etapa de calcular un conjunto de puntos de control Cij en dicho triángulo viene dado por la expresión:

3. El método según cualquiera de las reivindicaciones 1 ó 2, donde dicho punto (O) ajeno al plano puede ser finito, es decir, definido por sus coordenadas, o puede estar en el infinito, es decir, definido por una dirección.
4. El método según la reivindicación 3, donde si dicho punto (O) es finito, los pesos λij se eligen libremente, mientras que si dicho punto (O) es infinito, los pesos λij valen todos 1.
5. El método según la reivindicación 4, donde la etapa de transformar el conjunto de puntos de control Cij en una pluralidad de puntos Pij que definen un poliedro de control, viene dada por la expresión:
6. El método según la reivindicación 5, donde dicha etapa de obtener una superficie NURBS a partir de dicho poliedro de control, viene dada por la expresión:

donde (u,v) son las coordenadas baricéntricas del triángulo definido por los puntos C00 C0n Cn0.
7. El método según la reivindicación 6, donde dicha etapa de transformar dicha pluralidad L de lados l en una pluralidad de entidades lineales l' constitutivas de dicha malla espacial, se realiza de la siguiente forma:
- para cada lado l:
8. El método según cualquiera de las reivindicaciones anteriores, donde n
9. Estructura mallada obtenida a partir del método según cualquiera de las reivindicaciones anteriores.
10. Un programa informático que comprende medios de código de programa informático adaptados para realizar las etapas del método según cualquiera de las reivindicaciones de la 1 a la 8, cuando dicho programa se ejecuta en un ordenador, un procesador de señal digital, una disposición de puertas de campo programable, un circuito integrado de aplicación específica, un microprocesador, un microcontrolador, y cualquier otra forma de hardware programable.
Patentes similares o relacionadas:
Sistema y procedimientos de formación de imágenes que visualizan una imagen reconstruida multidimensional fusionada, del 27 de Mayo de 2020, de ALCON, INC: Un sistema de formación de imágenes quirúrgicas , que comprende: un procesador ; un dispositivo de entrada conectado […]
MÉTODO PARA LA OBTENCIÓN DE UN MODELO FÍSICO DE UN OBJETO TRIDIMENSIONAL A PARTIR DE SUPERFICIES DESARROLLABLES Y MODELO FÍSICO ASÍ OBTENIDO, del 2 de Abril de 2020, de UNIVERSIDAD NACIONAL DE COLOMBIA: La presente invención se relaciona con un método para obtener un modelo físico de un objeto tridimensional a partir de un modelo digital de […]
Indicador terapéutico atómico, del 25 de Marzo de 2020, de Atomic Oncology Pty Ltd: Un procedimiento para determinar la radio-sensibilidad de un cáncer, comprendiendo el procedimiento cuantificar el nivel de manganeso en una […]
Procedimiento de control de un tratamiento ortodóntico, del 11 de Diciembre de 2019, de Dental Monitoring: Procedimiento de control del posicionamiento de dientes de un paciente, comprendiendo el indicado procedimiento las etapas siguientes: a) menos de 3 meses después […]
Método y sistema para generar datos de modelo de prenda, del 6 de Noviembre de 2019, de Reactive Reality GmbH: Un método para generar datos de modelo de prenda representativos de una pieza de prenda, comprendiendo el método - procesar datos de imagen de entrada que […]
Malla adaptativa de resolución para realizar metrología en 3-d de un objeto, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un metodo (200, 200') para generar una malla adaptativa de resolucion para la metrologia 3-D de un objeto , que comprende: recibir […]
Procedimiento, dispositivo y programa informático para la adaptación virtual de una montura de gafas, del 11 de Septiembre de 2019, de Carl Zeiss Vision International GmbH: Procedimiento implementado por ordenador para la adaptación de gafas, que comprende: adaptar virtualmente un modelo de montura paramétrico a un modelo 3D […]
EQUIPO DE AYUDA PARA INTERVENCIÓN MAMARIA, del 9 de Julio de 2019, de CELLA MEDICAL SOLUTIONS SL: Equipo de ayuda para intervención mamaria, aplicable en intervenciones de reconstrucción mamaria mediante DIEP, que comprende, integrados […]