PROCEDIMIENTO Y DISPOSITIVO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO.
Procedimiento dispositivo de medida de velocidad de vehículos a partir de la captación de imágenes del paso de un vehículo.
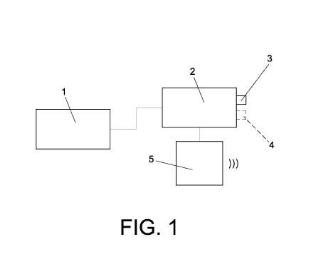
Utiliza una única cámara (2) de captación de imágenes que está conectada a un procesador (1) en el que corre un programa de procesado e imágenes de visión artificial de acuerdo con el procedimiento de la invención, el cual realiza el cálculo de la velocidad de un vehículo (13) mediante la captación de al menos una primera (11) y una segunda imagen (12) captadas con un intervalo de tiempo conocido entre una y otra, en las que analiza el desplazamiento de un punto común (14) del vehículo entre dichas imágenes captadas.
Realiza la medida de la velocidad con una precisión adecuada con fines sancionadores de exceso de velocidad, y al mismo tiempo detecta cuando un vehículo se salta el semáforo en rojo y a qué velocidad se lo salta todo mediante el uso de una única cámara (2).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201031115.
Solicitante: EYP SCAP, S.A.
Nacionalidad solicitante: España.
Inventor/es: PÉREZ ROMERO,Francisco Manuel.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01P3/38 FISICA. › G01 METROLOGIA; ENSAYOS. › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › G01P 3/00 Medida de la velocidad lineal o angular; Medida de diferencias de velocidades lineales o angulares (G01P 5/00 - G01P 11/00 tienen prioridad; midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00). › utilizando medios fotográficos.
- G08G1/054 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › fotografiando los vehículos en exceso de velocidad.
Fragmento de la descripción:
PROCEDIMIENTO Y DISPOSITIVO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO OBJETO DE LA INVENCIÓN
La invención proporciona un nuevo procedimiento y dispositivo que permiten efectuar la medida de la velocidad de tránsito de los vehículos mediante el único uso de una cámara de captación de imágenes, realizando la medida de la velocidad a partir de las imágenes captadas del paso de los vehículos.
Es otro obj eto de la invención el detectar cuando un vehículo se salta un semáforo en rojo y a que velocidad lo ha hecho, circunstancia que puede ser agravante en caso de accidente, ya sea como consecuencia del atropello de un peatón o un choque con otro vehículo que atraviese la vía.
La invención es aplicable en cualquier sector de la industria en el que se requiera realizar la medida de la velocidad de paso de un vehículo, y más concretamente en aquellas aplicaciones en las que se requiere efectuar la detección de infracciones por exceso de velocidad con carácter sancionador.
ANTECEDENTES DE LA INVENCIÓN
En el estado de la técnica son conocidos sistemas de control de tráfico (ITS) que en unos casos están previstos para efectuar la detección de infracciones por velocidad, como es el caso de los dispositivos conocidos como
cinemómetros fabricados en diferentes pueden ser los rádar microondas, piezoeléctricos bajo pavimento, etc.
Para el caso de la detección de velocidad y por saltarse un semáforo
tecnologías como láser, sensores
infracciones por en rojo, existen
sistemas en el mercado que hacen uso de una cámara para registrar el paso del vehículo cuando el semáforo está en rojo, pero no realizan una medida de velocidad, sino es con
la ayuda adicional de sensores de posición y velocidad, como un cinemómetro tradicional: rádar, etc.
Por tanto, para detectar que un vehículo se salta un semáforo en rojo, y a que velocidad se lo salta, es necesario el empleo de la cámara de captación de imágenes y de un dispositivo que realice la medida de la velocidad con precisión, para poder establecer la infracción con carácter sancionador.
Por otro lado, es conocido el empleo de sistemas, basados en un ordenador, que analizan las imágenes capturadas por una cámara de vídeo para obtener medidas de parámetros de tráfico, como conteo de vehículos, clasificación, velocidad media, vehículos parados, con exceso de velocidad o circulando en sentido contrario, etc.
Una aplicación típica de este tipo de sistemas son los conocidos como sistemas de detección automática de incidentes (DAI) que se usan en los túneles de carretera para alertar a los operadores cuando detectan una anomalía en el tráfico. Estos sistemas disponen de funcionalidades de estimación de la velocidad, pero ésta se mide con una tolerancia superior al 20% de la velocidad real. Por tanto estos sistemas son muy útiles desde el punto de vista informativo, pero en lo referente a la medida de la velocidad, carecen de la precisión necesaria para ser utilizados con carácter sancionador. En la actualidad no existe en el mercado ningún cinemómetro que registre infracciones por exceso de velocidad, o por el salto de un semáforo en roj o, con el uso de una sola cámara de vídeo, como elemento sensor.
La invención realiza esta función aportando toda la información que se requiere para tramitar la infracción,
para lo que el cálculo de la velocidad la realiza con un baj o margen de error y a partir de la captación de las imágenes del vehículo que lo identifiquen de forma inequívoca. DESCRIPCIÓN DE LA INVENCIÓN La invención realiza la medida de la velocidad mediante el uso combinado de una cámara y visión artificial, a partir del análisis del desplazamiento del 5 vehículo y de la matrícula a través de la captación de dos imágenes consecutivas del vehículo en un intervalo de tiempo conocido. Para ello la invención proporciona un nuevo procedimiento de medida de la velocidad de los vehículos a 10 partir de la captación de imágenes del paso del vehículo que se caracteriza porque comprende en primera instancia situar una cámara de captación de imágenes a una altura "h" conocida, de forma que se enfoque a un carril por el que transitan los vehículos objeto de medición. A continuación 15 se capta una imagen patrón del carril objeto de medición sin vehículos, y se establece en la imagen patrón tres ejes de coordenadas virtuales X, Y, Z, de forma que el ej e X está determinado por una línea que divide la imagen patrón en dos partes iguales, izquierda y derecha, el eje Y por 2 O una línea perpendicular al ej e X, que divide la imagen en dos pares iguales, superior e inferior, y el ej e Z se corresponde con altura sobre el plano X e Y. Seguidamente se establecen cuatro puntos de referencia conocidos en la imagen patrón, dos en el eje X y dos en el 25 ej e Y, Y a continuación se miden las coordenadas de estos puntos establecidos en la imagen patrón captada, de modo que se obtiene una referencia de las coordenadas de los puntos establecidos en el eje X e Y. Para establecer una equivalencia entre las medidas de 30 la imagen patrón con las medidas de la imagen real, se mide la distancia real en el eje X, entre la proyección vertical de la cámara sobre el suelo y los puntos de referencia del eje X, e igualmente se mide la distancia en el eje Y entre la proyección vertical de la cámara sobre el suelo y los 35 puntos de referencia del eje Y. Para poder establecer esta equivalencia, los puntos del eje X establecidos, tanto enla imagen real como en la imagen patrón, se corresponden con el centro del lado inferior y del lado superior de la imagen y los del eje Y con el centro del lado izquierdo y derecho de la imagen, de manera que sea muy sencillo el
poder establecer la equivalencia entre las medidas dentro de la imagen patrón respecto de la imagen real. A continuación se calculan las coordenadas X e Y paracada uno de los píxeles de la imagen patrón capturada, respecto de la proyección vertical de la cámara sobre el suelo, a partir de los anteriores datos, suponiendo que todos los píxeles se encuentran en el plano formado por los ejes X e Y, y aplicando una corrección correspondiente a la diferencia proporcional que existe entre la longitud de la proyección de la cámara sobre el lado inferior de la imagen patrón y sobre el lado superior de dicha imagen patrón, respecto de la longitud del centro de la imagen patrón. Esto es debido a que existe una diferencia entre la longitud real de la proyección de la cámara sobre el lado superior de la imagen patrón, respecto de la proyección de la cámara sobre el lado inferior de la imagen patrón.
En este punto se calcula la distancia D entre dos píxeles a y b de la imagen patrón a partir de la diferencia de coordenadas X e Y calculadas para cada uno de los píxeles, según la ecuación D = (X 2 + y2) 1/2, donde X = Xb-Xa, e Y= Yb-Ya.
Con las fases anteriores queda establecida la correspondencia que existe entre las medidas de la imagen patrón captada y las medidas de la imagen real, de forma que a continuación el procedimiento prevé realizar la captación de una primera y de una segunda imagen del paso del vehículo por su parte trasera con un intervalo de tiempo conocido entre la captación de la primera y la segunda imagen, de modo que a continuación en la primera y en la segunda imagen se selecciona un punto común conocido en la parte trasera del vehículo que es la que se ha
captado en la primera y segunda imagen. El cálculo de la velocidad se realiza a partir de la distancia recorrida por el punto seleccionado común a la primera y segunda imagen.
Para ello es necesario conocer la altura a la que se encuentra el punto seleccionado común a ...
Reivindicaciones:
1. PROCEDIMIENTO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN
VEHÍCULO, que comprende: situar una cámara (2) de captación de imágenes a una al tura h conocida y enfocarla a un carril (6) de paso de vehículos (13) objeto de medición, captar una imagen patrón (7) del carril (6) objeto de medición sin vehículos, establecer en la imagen patrón (7) tres ejes decoordenadas; en los que el eje X está determinado por una línea que divide la imagen patrón en dos partes iguales, izquierda y derecha; el eje Y está determinado por una línea perpendicular al eje X, que la divide en dos partes iguales, superior e inferior; y el eje Z se corresponde con la altura sobre el plano X Y,
establecer cuatro puntos de referencia conocidos en la imagen patrón (7) , dos en el eje X; y dos en el eje Y, y medir las coordenadas de los puntos establecidos en la imagen patrón (7) captada, -medir la distancia real en el eje X, entre la proyección vertical de la cámara (2) sobre el suelo y los puntos de referencia del ej e X, y medir la distancia en el ej e Y entre la proyección vertical de la cámara (2) sobre el suelo y los puntos de referencia del eje Y,
calcular las coordenadas X e Y para cada uno de los pixeles de la imagen patrón (7) capturada, respecto de la proyección vertical de la cámara (2) sobre el suelo, a partir de los anteriores datos, suponiendo que todos los píxeles se encuentran en el plano formado por los ejes X e Y, y aplicando una corrección correspondiente a la diferencia que existe entre la longitud (Lyi) de la proyección de la cámara (2) sobre el lado inferior de la imagen patrón (7) y sobre el lado superior (Lxs) de dicha
imagen patrón (7) respecto de la longitud del centro de la imagen patrón (7) ;
calcular la distancia D entre dos pixeles a y b de la imagen patrón a partir de la diferencia de coordenadas X e y calculadas para cada uno de los pixeles, según la ecuación D = (X2 + y 2) 1/2, donde X = Xb -Xa , e Y Yb -Ya, -Captar una primera imagen (11 ) del paso de un vehículo por su parte posterior en una primera posición, -captar una segunda imagen (12) del paso del vehículo por su parte posterior en una segunda posición más alej ada de la primera posición, con un intervalo de tiempo conocido respecto a la primera imagen, -seleccionar en la primera (11) y segunda imagen (12) un punto común (14) conocido en la parte trasera del vehículo,
establecer, de acuerdo con la normativa vigente, la al tura h1 que media desde el borde inferior posterior del vehículo hasta el suelo, -calcular la altura h2 que media desde el borde inferior posterior del vehículo hasta el punto común (14 ) seleccionado, mediante el cálculo de los pixeles que median desde el borde inferior posterior del vehículo hasta dicho punto común (14) seleccionado h2, -calcular la altura real hm a la que está ubicado el punto común seleccionado respecto del suelo, sumando las dos alturas anteriores h1+h2 en la primera y segunda imagen,
calcular las coordenadas del punto común (14) , en la primera (11) Y segunda (12) imagen captadas, Xm e Ym, mediante las ecuaciones Xm = tan (O'x) (h -hm) e Ym= (tan
( ~y) (h-hm) ) + la corrección correspondiente a la diferencia que existe entre la longitud de la proyección de la cámara sobre el lado superior de la imagen patrón y sobre el lado inferior de dicha imagen patrón respecto del centro de la imagen patrón; todo ello divido por dos;
calcular la distancia real recorrida Dab por las coordenadas del punto común desde la primera imagen Da
hasta la segunda imagen captada Db, mediante la ecuación Dba = ( (Xmb-Xma) 2+ (Ymb-Yma) 2) 1/2 , calcular la velocidad del vehículo a partir de la distancia Dba recorrida por dicho punto común y del tiempo 5 t transcurrido entre la captación de la primera y segunda imagen según la ecuación v=Dba/t 2. PROCEDIMIENTO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO, según reivindicación 1, caracterizado porque el cálculo de 10 las coordenadas X e Y para cada uno de los pixeles de la imagen patrón capturada, respecto de la proyección vertical de la cámara sobre el suelo, se realiza según las ecuaciones x= tan (O'x) . h, y= (tan (~y) . h) + (S (nf - n) ; en las que los ángulos O'X y ~y se obtienen a partir 15 del desplazamiento de las coordenadas de cada pixel desde la referencia conocida, correspondiéndose los ángulos O'X a los que forma la proyección vertical de la cámara respecto de la proyección sobre el eje X de cada pixel; y los ángulos ~y se corresponden a los que forma la proyección 2 O vertical de la cámara respecto de la proyección sobre el eje y de cada pixel; y realizándose su cálculo según las ecuaciones O'X= O'C + nf ~f; siendo O'C el ángulo que forma el pixel del centro de la imagen respeto de su proyección a la cámara, nf el número de filas desde el centro de la 25 imagen correspondiente al número de pixeles que presenta la resolución de la cámara en sentido vertical dividido por dos, y ~f incremento angular entre dos filas consecutivas, correspondiente a la diferencia del ángulo que forma el ángulo de los bordes superior e inferior de la imagen 30 dividido por el número de pixeles de la resolución vertical de la cámara; y en las que los ángulos ~y se calculan según la ecuación ~y= nc ~c, siendo nc número de columnas desde el centro de la imagen, correspondiente al número de pixeles que presenta la resolución de la cámara en sentido 35 horizontal dividido por dos, ~c el incremento angular entredos columnas consecutivas, correspondiente a la diferencia del ángulo que forma el ángulo de los bordes derecho e izquierdo de la imagen dividido por el número de pixeles de la resolución horizontal de la cámara; y siendo s el cociente entre la longitud real de la proyección de la cámara sobre el lado superior e inferior de la imagen patrón, nf el número de líneas de separación de la línea en la que se encuentra un pixel , respecto de la línea central de la imagen, y n el número de líneas totales de la imagen dividida por dos.
3. PROCEDIMIENTO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO, según reivindicación 1, caracterizado porque el punto común seleccionado es un punto de la matricula del vehículo.
4. PROCEDIMIENTO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO, según reivindicación 3, caracterizado porque el cálculo de la altura h2 que media desde el borde inferior posterior del vehículo hasta el punto común seleccionado en la matricula comprende calcular la altura h3 que media desde el borde inferior posterior del vehículo hasta el borde inferior de la matricula, correspondiente al número de píxeles comprendido en este espacio, más la altura h4 que media desde el borde inferior de la matrícula hasta el punto común seleccionado de la matrícula correspondiente al número de píxeles comprendido en este espacio, estimándose la altura h4 a partir de las cotas de la posición de los
caractéres que se definen en la normativa vigente, que indican la altura de los mismos, y las distancias de
separación hasta los bordes.
5. PROCEDIMIENTO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO, según reivindicación 4, caracterizado porque la altura h3 que media desde el borde inferior posterior del vehículo hasta el borde inferior de la matricula se calcula mediante
la ecuación h3 (Xc -Xa) /tan ad; siendo Xc la distancia estimada desde la proyección vertical de la cámara hasta la matricula a la altura h1; Xa la distancia real estimada desde la proyección vertical de la cámara hasta la matricula, ad el ángulo que forma la proyección vertical de la cámara con la proyección de la cámara sobre el punto común seleccionado de la matricula; y calculándose Xa tan
(ab) (h-h1) , donde ab es el ángulo que forma la proyección vertical de la cámara con la proyección de la cámara sobre el borde inferior del vehículo, y calculándose Xc = tan (ad) (h-h1)
6. PROCEDIMIENTO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO, según reivindicación 4, caracterizado porque tras establecer en la primera y segunda imagen un punto común en la matrícula del vehículo, comprende una fase de verificación de que las matriculas de la primera y segunda imagen coinciden, mediante proceso convencional OCR
(Reconocimiento de Caracteres Ópticos) .
7. PROCEDIMIENTO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO, según reivindicación 1, caracterizado porque tras la fase de establecer cuatro puntos de referencia conocidos en la imagen patrón, comprende un fase de medición en la imagen real enfocada por la cámara los ángulos que forman los ejes X e Y respeto de la proyección vertical de la cámara.
8. PROCEDIMIENTO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO, según reivindicación 1 o 4, caracterizado porque al menos una de las dos imágenes captadas se realiza en un punto en el que la proyección del borde inferior del vehículo sobre el asfalto, desde la posición de la cámara, se realiza sobre una superficie reflectante aplicada sobre la superficie del carril, para facilitar el cálculo de la
al tura h2 que media desde el borde inferior posterior del vehículo hasta el borde inferior de la matricula.
9. PROCEDIMIENTO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO,
según reivindicación 1, caracterizado porque comprende disparar un flash de alto periodo de repetición, sincronizado con la señal de captación de cada imagen de la secuencia, para identificar al vehículo y visualizar su matrícula en condiciones de baja luminosidad.
10. PROCEDIMIENTO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO, según reivindicación 4, caracterizado porque la captación de una primera y una segunda imagen de la parte posterior de un vehículo se realiza en la zona de un semáforo que es captado en la primera y segunda imagen para detectar cuando el vehículo lo pasa en rojo.
11. DISPOSITIVO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO,
caracterizado porque que comprende una cámara (2) digital de captación de imágenes que está conectada a un procesador
(1) en el que corre un programa de procesado de imágenes de visión artificial de acuerdo con el procedimiento de la reivindicación 1.
12. DISPOSITIVO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO,
según reivindicación 11, caracterizado porque La cámara (2) de captación de imágenes comprende un sensor CCD (Charge Coupled Device) seleccionado entre un sensor CCD sensible al infrarrojo (3) y un sensor CCD color (4) , que se conecta al procesador (1) .
13. DISPOSITIVO DE MEDIDA DE VELOCIDAD DE VEHÍCULOS A PARTIR DE LA CAPTACIÓN DE IMÁGENES DEL PASO DE UN VEHÍCULO,
según reivindicación 11, caracterizado porque comprende un flash (5) de alto periodo de repetición, sincronizado con la señal de captación de cada imagen de la secuencia, para
identificar al vehículo y visualizar su matrícula en condiciones de baja luminosidad.
Patentes similares o relacionadas:
PROCEDIMIENTO PARA LA MEDICIÓN PUNTUAL DE VELOCIDAD DE VEHÍCULOS A MOTOR, del 3 de Mayo de 2018, de UNIVERSIDAD DE ALCALA.: Procedimiento para la medición puntual de la velocidad de vehículos a motor, mediante al menos dos cámaras en un punto , apuntando a dos regiones […]
Procedimiento para la medición puntual de velocidad de vehículos a motor en tramo corto con geometría de mínimo error, del 30 de Abril de 2018, de UNIVERSIDAD DE ALCALA.: Procedimiento para la medición puntual de velocidad de vehículos a motor en tramo corto con geometría de mínimo error. La invención se refiere a un procedimiento […]
Procedimiento para detectar excesos de velocidad con almacenamiento restrictivo, del 6 de Septiembre de 2017, de JENOPTIK ROBOT GMBH: Procedimiento para la detección de excesos de velocidad con almacenamiento restrictivo de datos, en el que vehículos circulan a través […]
 Procedimientos y dispositivos para la toma de imágenes de un vehículo que supera una velocidad, del 16 de Febrero de 2016, de KAPSCH TRAFFICCOM AG: Procedimiento para la toma de imágenes de vehículos que recorren un tramo entre una entrada y una salida con velocidad demasiado alta, que […]
Procedimientos y dispositivos para la toma de imágenes de un vehículo que supera una velocidad, del 16 de Febrero de 2016, de KAPSCH TRAFFICCOM AG: Procedimiento para la toma de imágenes de vehículos que recorren un tramo entre una entrada y una salida con velocidad demasiado alta, que […]
Procedimiento para captar de forma concluyente la velocidad de un vehículo, del 1 de Julio de 2015, de JENOPTIK ROBOT GMBH: Procedimiento para medir la velocidad de un vehículo, en el que - un aparato de radar dirige una radiación de radar sobre una carretera de modo que al mismo […]
Método para detectar infracciones del límite de velocidad de un vehículo, del 26 de Noviembre de 2014, de KAPSCH TRAFFICCOM AG: Un método para detectar una infracción de la velocidad de un vehículo que se desplaza desde un primer sistema de carretera (G1) hasta un segundo sistema de carretera […]
Dispositivos y método para controlar un sistema de peaje de carreteras, del 24 de Septiembre de 2014, de KAPSCH TRAFFICCOM AG: Un dispositivo de control para un sistema de peaje de carreteras que se basa en unidades de a bordo transportadas por vehículos , que comprende: al […]
 Método de control para un sistema de peaje de carreteras, del 13 de Agosto de 2014, de KAPSCH TRAFFICCOM AG: Un método de control para un sistema de peaje de carreteras que se basa en unidades de a bordo transportadas por vehículos que tienen números […]
Método de control para un sistema de peaje de carreteras, del 13 de Agosto de 2014, de KAPSCH TRAFFICCOM AG: Un método de control para un sistema de peaje de carreteras que se basa en unidades de a bordo transportadas por vehículos que tienen números […]