Procedimiento para captar de forma concluyente la velocidad de un vehículo.
Procedimiento para medir la velocidad de un vehículo, en el que
- un aparato de radar (1) dirige una radiación de radar sobre una carretera de modo que al mismo tiempo pueden circular varios vehículos en un intervalo de medición definido mediante la radiación de radar,
- una parte de la radiación de radar se refleja por al menos un vehículo,
- la parte de radiación reflejada se compara con la radiación de radar dirigida sobre la carretera,
- se derivan valores de medición asignados a los vehículos a partir de la comparación para la velocidad y la distancia (E) con respecto al aparato de radar (1),
- se comparan las velocidades derivadas con una velocidad máxima admisible,
- se activa una cámara para crear una reproducción si una velocidad derivada es mayor que la velocidad máxima admisible, estando la velocidad derivada y el vehículo, para el que se derivó la velocidad excesiva, contenidos en la reproducción,
- se derivan continuamente múltiples veces los valores de medición por la duración del paso de los vehículos por el intervalo de medición,
- se concluye la plausibilidad de valores de medición anteriores mediante valores de medición derivados a continuación,
caracterizado por que
- se utilizan los valores de medición para las distancias (E) para la caracterización de las vías de los vehículos reflectores con respecto a la distancia con respecto al aparato de radar (1),
- la vía del vehículo, para el que se derivó la velocidad excesiva, se marca de forma asignada a éste en la reproducción.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08008407.
Solicitante: JENOPTIK ROBOT GMBH.
Nacionalidad solicitante: Alemania.
Dirección: OPLADENER STRASSE 202 40789 MONHEIM AM RHEIN ALEMANIA.
Inventor/es: TERLAU, NORBERT, BEHRENS, ANDREAS, DOHMANN,BERNHARD, KLEIN,CHRISTOPH PROF.DR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/92 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para la medición de la velocidad.
- G08G1/054 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › fotografiando los vehículos en exceso de velocidad.
PDF original: ES-2548099_T3.pdf
Fragmento de la descripción:
Procedimiento para captar de forma concluyente la velocidad de un vehículo La invención se refiere a un procedimiento para captar la velocidad de un vehículo y asignar de forma concluyente la velocidad captada al vehículo detectado, tal como es conocido de forma genérica por la patente EP 1 610 279 A1.
Sistemas de radar Doppler pertenecen a los instrumentos de medición principales para la vigilancia y realización de restricciones de velocidad legales para vehículos.
Para que aparatos de este tipo se permitan para su uso destinado, por un lado, se tiene que asegurar y hacer plausible que la velocidad medida es correcta y, por otro lado, la velocidad medida se debe poder asignar sin dudas al vehículo detectado.
La invención se refiere a un procedimiento que en particular resuelve el problema de una asignación sin dudas, aunque en este contexto también hace plausible la velocidad medida.
El hecho de que existen situaciones de medición en las que no es posible una asignación sin dudas de la velocidad medida al vehículo detectado, se debe especialmente al principio de la técnica de radar. La radiación de radar forma habitualmente un cono de radar que se expande en un ángulo de aproximadamente 5 a 10° y cuyo ancho aumenta de manera correspondiente a medida que aumenta la distancia, por lo que en una aplicación sobre una carretera de varios carriles se pueden encontrar al mismo tiempo varios vehículos en el cono de radar (intervalo de medición) . Una carretera de varios carriles está compuesta por varios carriles sobre los que circulan vehículos en la misma dirección.
Para identificar de forma unívoca un vehículo detectado, es decir, un vehículo que refleja la radiación de radar, es decir, para detectar el vehículo detectado en un grupo de vehículos, se propone en el documento EP 0 935 764 B1 captar al mismo tiempo con la velocidad también la distancia y asignar el vehículo a un carril (denominado vía en este caso) mediante la distancia captada. También con un procedimiento de acuerdo con el documento EP 1 610 279 A1 se concluye, a partir de una distancia medida para un vehículo que detecta una velocidad excesiva, el carril (denominado en este caso también voie = vía) sobre el que circula el vehículo para identificarlo dentro de un grupo de vehículos captados en una foto.
Para la medición de distancia mediante técnica de radar son conocidos aparatos de radar de impulsos y aparatos de radar con señales de radar permanente moduladas en frecuencia. En ambos casos, la distancia no se mide realmente sino que se deriva de otras magnitudes de medición. Por tanto, cuando en la siguiente descripción se habla de valores de medición y una velocidad medida se debe entender una velocidad derivada. Lo mismo es válido para la distancia y el ángulo.
Aparatos de radar de impulsos determinan la distancia mediante una medición del tiempo de propagación y requieren una medición de tiempo muy precisa para medir la distancia, es decir, la separación radial de piezas reflectoras de vehículos con respecto a la antena de radar. Una resolución de una distancia de, por ejemplo, un metro requiere una resolución de tiempo de 3, 33 ns. Por tanto, un control de desarrollo del proceso de medición requiere despliegues técnicos extremos para resoluciones altas.
Con aparatos de radar permanente se realiza la determinación de la distancia a partir de la diferencia de fase de señales de radar reflejadas con una frecuencia diferente.
Tal como es conocido se emite con un aparato de radar permanente una radiación de radar permanente constante con respecto a la amplitud y la frecuencia. En la reflexión en un objeto movido, esto es, un vehículo, esta radiación de radar experimenta un desplazamiento de frecuencia en función de la velocidad del vehículo. La parte de radiación reflejada de vuelta al interior del aparato de radar o sobre la antena de radar se compara con la radiación de radar emitida y se forma una diferencia de frecuencia, la denominada frecuencia Doppler, que es proporcional a la velocidad del vehículo.
Con la irradiación de una radiación de radar en diferentes frecuencias se obtienen radiaciones de reflexión desplazadas en frecuencia a partir de cuya diferencia de fase se deriva la distancia. Por tanto, la velocidad y la distancia se determinan mediante un proceso de medición común, con lo que está asegurada una asignación unívoca de los valores de medición entre sí.
A diferencia de la medición de velocidad, que se puede medir de manera muy exacta con el principio de radar Doppler, el intervalo de oscilación de los valores de medición de distancia es muy grande. Las reflexiones puntuales que llegan desde un vehículo hasta la antena de radar se extienden sobre todo el contorno del vehículo sobre el que se proyecta la sección transversal del radar. La sección transversal del radar proyectada sobre un vehículo que circula a través del cono de radar cambia en función de la respectiva geometría del vehículo y de su posición en el 65 cono de radar, empezando con la entrada en el cono de radar hasta la salida del mismo. Mediante el receptor se detecta para cada momento de medición una suma de valores de medición (conjunto de valores de medición) a
partir de reflexiones parciales. Por regla general, esta suma se recibe estadísticamente junto con otros reflectores que actúan de forma parásita tales como barreras de contención o vallas metálicas como distribución de Rayleigh. Se miden distancias que están dispersas en el orden de magnitud del ancho de vía y de las medidas de vehículo.
Una identificación unívoca de un vehículo en un grupo de vehículos sólo mediante valores de medición de distancia individuales que se asignan a un carril no es posible de manera segura debido a las posibles ambigüedades como consecuencia del diferente comportamiento de reflexión de los vehículos y posibles reflexiones múltiples.
Incluso si se forma un valor medio con respecto a cada momento de medición a partir de la suma de los valores de medición, este valor medio no se puede asignar en cualquier caso de forma unívoca a un carril.
Lo mismo es válido también cuando se ignoran valores de medición fuera de un intervalo de tolerancia previamente establecido y el valor medio sólo se forma a partir de los valores de medición restantes. Aunque se excluye con ello una falsificación del valor de distancia promediado como consecuencia de reflexiones parciales en reflectores que actúan de forma parásita, no es posible para cada situación de medición una identificación mediante el valor de distancia promediado y su asignación a un carril.
El aparato de radar se debería orientar obligatoriamente en tal ángulo agudo con respecto a la carretera que todos los valores de medición de distancia concebibles se pueden asignar de forma unívoca a sólo un carril en cada caso. Dado que los vehículos pasan obligatoriamente por un determinado intervalo de distancias debido al ancho del cono de radar, no se deben solapar estos intervalos de distancia para dos vehículos que se deben diferenciar uno de otro. Sin embargo, los intervalos de distancia se desplazan si los vehículos no circulan de forma ideal en el centro del carril y en cualquier caso se solapan cuando un vehículo se cambia de carril en el intervalo de medición. De este modo se producen situaciones de medición en las que un vehículo no se puede asignar de forma unívoca a un carril, con lo que el carril no constituye una característica segura para la identificación de un vehículo en un grupo de vehículos.
La invención se basa en el objetivo de crear un procedimiento en el que se pueda diferenciar un vehículo detectado en un grupo de vehículos independientemente de características de la carretera u otras características del entorno.
Este objetivo se consigue mediante un procedimiento con las características de la reivindicación 1.
Perfeccionamientos ventajosos se describen en las reivindicaciones dependientes.
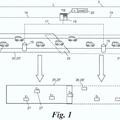
A continuación, la invención se debe explicar a modo de ejemplo mediante dibujos. 35 Muestran:
La figura 1 una situación de medición en una disposición de un aparato de radar al lado de la carretera La figura 2 una situación de medición en una disposición de un aparato de radar por encima de la carretera Para describir un primer ejemplo de realización mediante la figura 1 se debe partir de que un aparato de radar 1, que emite una radiación de radar con un ángulo de apertura , está colocado al lado de la carretera en un ángulo de colocación ß horizontal agudo del eje de radar con respecto a la dirección de la carretera a lado de una carretera con varios carriles. El ángulo de colocación ß... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para medir la velocidad de un vehículo, en el que -un aparato de radar (1) dirige una radiación de radar sobre una carretera de modo que al mismo tiempo pueden circular varios vehículos en un intervalo de medición definido mediante la radiación de radar, -una parte de la radiación de radar se refleja por al menos un vehículo, -la parte de radiación reflejada se compara con la radiación de radar dirigida sobre la carretera, -se derivan valores de medición asignados a los vehículos a partir de la comparación para la velocidad y la distancia (E) con respecto al aparato de radar (1) , -se comparan las velocidades derivadas con una velocidad máxima admisible, -se activa una cámara para crear una reproducción si una velocidad derivada es mayor que la velocidad máxima admisible, estando la velocidad derivada y el vehículo, para el que se derivó la velocidad excesiva, contenidos en la reproducción.
15. se derivan continuamente múltiples veces los valores de medición por la duración del paso de los vehículos por el intervalo de medición, -se concluye la plausibilidad de valores de medición anteriores mediante valores de medición derivados a continuación, caracterizado por qu.
20. se utilizan los valores de medición para las distancias (E) para la caracterización de las vías de los vehículos reflectores con respecto a la distancia con respecto al aparato de radar (1) , -la vía del vehículo, para el que se derivó la velocidad excesiva, se marca de forma asignada a éste en la reproducción.
2. Procedimiento para medir la velocidad de un vehículo en el que -un aparato de radar (1) dirige una radiación de radar sobre una carretera de modo que al mismo tiempo pueden circular varios vehículos en un intervalo de medición definido mediante la radiación de radar, -una parte de la radiación de radar se refleja por al menos un vehículo, -la parte de radiación reflejada se compara con la radiación de radar dirigida sobre la carretera, -se derivan valores de medición asignados a los vehículos a partir de la comparación para la velocidad, -se comparan las velocidades derivadas con una velocidad máxima admisible, -se activa una cámara para crear una reproducción si una velocidad derivada es mayor que la velocidad máxima admisible, estando la velocidad derivada y el vehículo, para el que se derivó la velocidad excesiva, 35 contenidos en la reproducción, caracterizado por que -se derivan valores de medición adicionales para ángulos de medición () , -se derivan continuamente múltiples veces los valores de medición por la duración del paso de los vehículos por el intervalo de medición.
40. se concluye la plausibilidad de valores de medición anteriores mediante valores de medición derivados a continuación, -se utilizan los valores de medición para los ángulos de medición () para la caracterización de las vías de los vehículos reflectores con respecto al haz principal del aparato de radar (1) , -la vía del vehículo, para el que se derivó la velocidad excesiva, se marca de forma asignada a éste en la 45 reproducción.
3. Procedimiento de acuerdo con la reivindicación 1, caracterizado por que se derivan también valores de medición para ángulos de medición () a partir de la comparación y los valores de medición derivados múltiples veces para los ángulos de medición () , junto con los valores de medición derivados en cada caso de manera simultánea para la 50 velocidad y la distancia, forman un triplete de valores mediante los que se determina la vía con respecto a su ubicación con respecto al aparato de radar (1) .
4. Procedimiento de acuerdo con la reivindicación 2, caracterizado por que a partir de la comparación también se derivan valores de medición para distancias y los valores de medición derivados múltiples veces para la distancia 55 (E) , junto con los valores de medición derivados en cada caso de manera simultánea para la velocidad y los ángulos de medición () , forman un triplete de valores mediante los que se determina la vía con respecto a su ubicación con respecto al aparato de radar (1) .
5. Procedimiento de acuerdo con la reivindicación 2 o 3, caracterizado por que la parte de radiación reflejada se 60 recibe en cada caso de forma proporcional por dos antenas de radar y el ángulo de medición () se determina mediante distancias (E) derivadas de diferente manera del mismo mediante procedimientos de triangulación.
6. Procedimiento de acuerdo con una de las reivindicaciones 1 a 2, caracterizado por que valores de medición que no se confirman como plausibles se eliminan y no se utilizan para la caracterización o para la determinación de la 65 vía.
7. Procedimiento de acuerdo con la reivindicación 3 o 5, caracterizado por que la caracterización o la determinación de las vías individuales se realiza con respecto a su ubicación relativa entre sí para diferenciar los vehículos unos de otros.
8. Procedimiento de acuerdo con la reivindicación 1 o 3, caracterizado por que el vehículo infractorio se marca en la reproducción al reproducirse una línea que representa la vía.
9. Procedimiento de acuerdo con la reivindicación 2, caracterizado por que el vehículo infractorio se marca en la reproducción al reproducirse un intervalo que representa un intervalo angular. 10
10. Procedimiento de acuerdo con la reivindicación 1 o 2, caracterizado por que el vehículo infractorio se marca en la reproducción al reproducirse un segmento anular que representa un intervalo de distancias.
Patentes similares o relacionadas:
PROCEDIMIENTO PARA LA MEDICIÓN PUNTUAL DE VELOCIDAD DE VEHÍCULOS A MOTOR, del 3 de Mayo de 2018, de UNIVERSIDAD DE ALCALA.: Procedimiento para la medición puntual de la velocidad de vehículos a motor, mediante al menos dos cámaras en un punto , apuntando a dos regiones […]
Procedimiento para la medición puntual de velocidad de vehículos a motor en tramo corto con geometría de mínimo error, del 30 de Abril de 2018, de UNIVERSIDAD DE ALCALA.: Procedimiento para la medición puntual de velocidad de vehículos a motor en tramo corto con geometría de mínimo error. La invención se refiere a un procedimiento […]
Procedimiento para detectar excesos de velocidad con almacenamiento restrictivo, del 6 de Septiembre de 2017, de JENOPTIK ROBOT GMBH: Procedimiento para la detección de excesos de velocidad con almacenamiento restrictivo de datos, en el que vehículos circulan a través […]
 Procedimientos y dispositivos para la toma de imágenes de un vehículo que supera una velocidad, del 16 de Febrero de 2016, de KAPSCH TRAFFICCOM AG: Procedimiento para la toma de imágenes de vehículos que recorren un tramo entre una entrada y una salida con velocidad demasiado alta, que […]
Procedimientos y dispositivos para la toma de imágenes de un vehículo que supera una velocidad, del 16 de Febrero de 2016, de KAPSCH TRAFFICCOM AG: Procedimiento para la toma de imágenes de vehículos que recorren un tramo entre una entrada y una salida con velocidad demasiado alta, que […]
Método para detectar infracciones del límite de velocidad de un vehículo, del 26 de Noviembre de 2014, de KAPSCH TRAFFICCOM AG: Un método para detectar una infracción de la velocidad de un vehículo que se desplaza desde un primer sistema de carretera (G1) hasta un segundo sistema de carretera […]
Dispositivos y método para controlar un sistema de peaje de carreteras, del 24 de Septiembre de 2014, de KAPSCH TRAFFICCOM AG: Un dispositivo de control para un sistema de peaje de carreteras que se basa en unidades de a bordo transportadas por vehículos , que comprende: al […]
 Método de control para un sistema de peaje de carreteras, del 13 de Agosto de 2014, de KAPSCH TRAFFICCOM AG: Un método de control para un sistema de peaje de carreteras que se basa en unidades de a bordo transportadas por vehículos que tienen números […]
Método de control para un sistema de peaje de carreteras, del 13 de Agosto de 2014, de KAPSCH TRAFFICCOM AG: Un método de control para un sistema de peaje de carreteras que se basa en unidades de a bordo transportadas por vehículos que tienen números […]
SISTEMA DE VIGILANCIA DEL TRÁFICO, del 9 de Febrero de 2012, de JENOPTIK ROBOT GMBH: Sistema de vigilancia de tráfico, compuesto por las unidades funcionales esenciales, por una unidad sensora para registrar un vehículo de carretera que circula por ejemplo […]