Dispositivos y procedimientos de control móvil para vehículos.
Dispositivo de control móvil (6) para el control de vehículos (4) con:
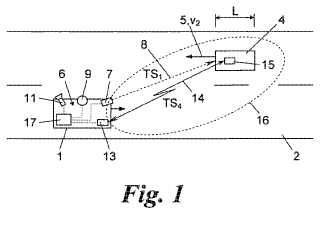
un sensor (7) para medir la velocidad de vehículos (4) que pasan por una primera zona de detección (8),proporcionando este sensor (7) un sello de tiempo (TS1) al valor de medición de 5 velocidad (vr) de un paso devehículo;
un sensor (9) para medir al menos indirectamente la geometría, preferentemente para medir la longitud, de vehículos(4) que pasan por una segunda zona de detección (10), proporcionando este sensor (9) un sello de tiempo (TS2) alvalor de medición de geometría (L) de un paso de vehículo;
una cámara (11) para grabar imágenes (B) de vehículos (4) que pasan por una tercera zona de detección (12),proporcionando esta cámara (11) un sello de tiempo (TS3) a la imagen (B) de cada paso de vehículo; y
un dispositivo de evaluación (17), conectado a la cámara (11) y a los sensores (7, 9) mencionados, que estáconfigurado para calcular a partir del valor de medición de velocidad (vr), su sello de tiempo (TS1) y la primera zonade detección (8), así como a partir del valor de medición de geometría (L), su sello de tiempo (TS2) y la segundazona de detección (10), el lugar y la hora en el que se espera el paso de un vehículo por la tercera zona dedetección (12) a fin de determinar así la imagen que corresponde (B) en base a su sello de tiempo (TS3) y la tercerazona de detección (12).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10450169.
Solicitante: KAPSCH TRAFFICCOM AG.
Nacionalidad solicitante: Austria.
Dirección: Am Europlatz 2 1120 Wien AUSTRIA.
Inventor/es: HANISCH,HARALD, RATZ,MARKUS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G07B15/00 FISICA. › G07 DISPOSITIVOS DE CONTROL. › G07B APARATOS DE ENTREGA DE TIQUES; TAXIMETROS; DISPOSICIONES O APARATOS PARA COBRAR EN UN PUNTO DE CONTROL EL PRECIO DE LOS BILLETES O LOS DERECHOS DE ENTRADA O DE PEAJE; APARATOS PARA FRANQUEAR. › Dispositivos o aparatos para cobrar el precio de los billetes, el peaje o las entradas en uno o más puntos de control (monedas o papeles de valor, p. ej. billetes G07D; aparatos para la venta o el alquiler de artículos o de servicios accionados por monedas, tarjetas de crédito, billetes o similares G07F 7/00, G07F 17/00).
- G08G1/054 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › fotografiando los vehículos en exceso de velocidad.
PDF original: ES-2404151_T3.pdf
Fragmento de la descripción:
Dispositivos y procedimientos de control móvil para vehículos La presente invención se refiere a un dispositivo de control móvil para el control de vehículos. La invención se refiere además a un procedimiento para tales controles.
Este tipo de dispositivo es conocido, por ejemplo, por el documento US2008/0077312.
En los controles de vehículos, los valores de medición de velocidad se combinan a menudo con las imágenes grabadas de un vehículo para su clara identificación a fin de sancionar los delitos de tráfico ("enforcement") . Si tales controles se ejecutan desde una plataforma de control móvil que se encuentra en movimiento, esto requiere actualmente una asignación manual costosa de los valores de medición de velocidad a las imágenes grabadas y viceversa, porque las zonas de detección de los sensores de medición de velocidad y las cámaras de grabación de imágenes convencionales no se solapan nunca con exactitud. Por esta razón y debido a la variación constante de la velocidad relativa en el tráfico fluido se pueden originar ambigüedades entre distintas imágenes grabadas y distintos valores de medición de velocidad, que imposibilitan una asignación única.
La invención tiene el objetivo de crear dispositivos y procedimientos de control móvil que permitan controlar de manera ampliamente automatizada los vehículos en el tráfico fluido, es decir, tanto en el caso de plataformas de control en movimiento como en el caso de vehículos en movimiento que se van a controlar.
Este objetivo se consigue en un primer aspecto de la invención mediante un dispositivo de control móvil con: un sensor para medir la velocidad de vehículos que pasan por una primera zona de detección, proporcionando este sensor un sello de tiempo al valor de medición de velocidad de un paso de vehículo; un sensor para medir al menos indirectamente la geometría, preferentemente para medir la longitud, de vehículos que pasan por una segunda zona de detección, proporcionando este sensor un sello de tiempo al valor de medición de geometría de un paso de vehículo; una cámara para grabar imágenes de vehículos que pasan por una tercera zona de detección, proporcionando esta cámara un sello de tiempo a la imagen de cada paso de vehículo; y un dispositivo de evaluación, conectado a la cámara y a los sensores mencionados, que está configurado para calcular a partir del valor de medición de velocidad, su sello de tiempo y la primera zona de detección, así como a partir del valor de medición de geometría, su sello de tiempo y la segunda zona de detección el lugar y la hora, en el que se espera el paso de un vehículo por la tercera zona de detección a fin de determinar así la imagen que corresponde en base a su sello de tiempo y la tercera zona de detección.
En un segundo aspecto, los objetivos de la invención se consiguen mediante un procedimiento para el control de vehículos con los siguientes pasos ordenados arbitrariamente: medir la velocidad de un vehículo que pasa por una primera zona de detección y proporcionar un sello de tiempo al valor de medición de velocidad; medir al menos indirectamente una geometría, con preferencia la longitud, de un vehículo que pasa por una segunda zona de detección y proporcionar un sello de tiempo al valor de medición de geometría; grabar imágenes de vehículos que pasan por una tercera zona de detección y proporcionar un sello de tiempo a cada imagen; y además con los pasos siguientes: calcular a partir del valor de medición de velocidad, su sello de tiempo y la primera zona de detección, así como a partir del valor de medición de geometría, su sello de tiempo y la segunda zona de detección el lugar y la hora, en el que se espera el paso de un vehículo por la tercera zona de detección; y determinar así la imagen que corresponde en base a su sello de tiempo y a la tercera zona de detección.
La invención considera las diferentes zonas de detección, que tienen los sensores y las cámaras individuales de un dispositivo de control móvil, y calcula valores esperados para los movimientos del vehículo controlado dentro de las zonas de detección, de manera que las imágenes del vehículo, grabadas dentro de una zona de detección, se puedan combinar automáticamente con los valores de medición de velocidad que proceden de una zona de detección distinta a ésta.
El término “zona de detección”, usado aquí, abarca cada segmento del entorno que se puede detectar desde la ubicación actual del dispositivo de control móvil mediante sensores o cámaras, ya sea un segmento espacial de forma cónica, piramidal, prismática, lineal, plana, etc. o similar.
El cálculo se puede ejecutar también después de un posprocesamiento (post processing) , es decir, las zonas de detección o los sellos de tiempo se pueden asignar también tras ejecutarse y almacenarse todas las mediciones individuales.
En principio es posible también el uso de otros sensores, cuyos datos de sensor se asignan al vehículo, que pasa, mediante el procedimiento descrito: sensores de gas de escape, sensores de nivel de sonido, sensores de temperatura para la inspección de neumáticos o frenos, vídeo sensores para la inspección de neumáticos, etiquetas identificadoras para el transporte de mercancías peligrosas, distintivos, viñetas, etc.
Todas las imágenes mencionadas aquí pueden ser también en cada caso parte de una secuencia de vídeo.
Una realización especialmente preferida de la invención, que sirve para controlar los vehículos equipados con OBUs DSRC (unidades de a bordo de comunicación dedicada de corto alcance, dedicated short range communicationonboard units) , como los que se usan, por ejemplo, en el marco de sistemas de peaje viario DSRC, se caracteriza por un transceptor DSRC para la comunicación DSRC con OBUs DSRC de vehículos que pasan por una cuarta zona de detección, proporcionando este transceptor DSRC un sello de tiempo a la comunicación DSRC de cada paso de vehículo; estando configurado además el dispositivo de evaluación para determinar, en base a su sello de tiempo y a la cuarta zona de detección, la comunicación DSRC que corresponde a la imagen determinada.
La realización preferida correspondiente del procedimiento según la invención se caracteriza por los pasos adicionales de ejecutar comunicaciones DSRC con los OBUs DSRC de los vehículos que pasan por una cuarta zona de detección y proporcionar un sello de tiempo a cada comunicación DSRC; y determinar, en base a su sello de tiempo y a la cuarta zona de detección, la comunicación DSRC que corresponde a la imagen determinada.
Los OBUs DSRC se usan en los sistemas de peaje viario DSRC para ejecutar comunicaciones DSRC con radiobalizas situadas del lado de la carretera (roadside equipment, RSE) . Las comunicaciones DSRC se convierten finalmente en transacciones de peaje en el sistema de peaje viario. Para controlar los vehículos con OBUs DSRC se usan también plataformas de control móviles que consultan los OBUs DSRC de los vehículos en el tráfico fluido a fin de acceder a datos para el control de las transacciones de peaje generadas en el sistema de peaje viario, o simplemente a fin de comprobar sólo la presencia de un OBU DSRC operativo en un vehículo. En este tipo de control se origina adicionalmente el problema de que las zonas de emisión y recepción de los transceptores DSRC del dispositivo de control móvil y del OBU DSRC del vehículo controlado forman en su zona de solapamiento, necesaria para la comunicación vía radio, una zona de detección que se puede diferenciar ampliamente de las zonas de detección del resto de sensores y cámaras del dispositivo de control móvil. Esto origina a su vez un problema de asignación entre las radiocomunicaciones DSRC, por una parte, y las imágenes grabadas para la aplicación de sanciones, por la otra parte. La invención soluciona este problema mediante el cálculo de valores esperados respecto a la hora y al lugar, en el que el vehículo, con el que se ejecutó una comunicación DSRC, se encuentra en la zona de detección de la cámara para posibilitar una asignación unívoca de una imagen a una comunicación DSRC.
Se entiende que en esta realización, la determinación del valor de medición de velocidad es, dado el caso, sólo un resultado intermedio en el proceso de asignación de las comunicaciones DSRC a las imágenes, es decir, no representa una señal de partida propia o un resultado del dispositivo de control o del procedimiento de control, sino que sirve sólo para calcular los valores esperados mencionados y, por tanto, para asignar las comunicaciones DSRC a las imágenes.
La velocidad de los vehículos se puede medir en sí de cualquier forma conocida en la técnica. Según una primera... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de control móvil (6) para el control de vehículos (4) con: un sensor (7) para medir la velocidad de vehículos (4) que pasan por una primera zona de detección (8) , proporcionando este sensor (7) un sello de tiempo (TS1) al valor de medición de velocidad (vr) de un paso de vehículo; un sensor (9) para medir al menos indirectamente la geometría, preferentemente para medir la longitud, de vehículos
(4) que pasan por una segunda zona de detección (10) , proporcionando este sensor (9) un sello de tiempo (TS2) al valor de medición de geometría (L) de un paso de vehículo; una cámara (11) para grabar imágenes (B) de vehículos (4) que pasan por una tercera zona de detección (12) , proporcionando esta cámara (11) un sello de tiempo (TS3) a la imagen (B) de cada paso de vehículo; y un dispositivo de evaluación (17) , conectado a la cámara (11) y a los sensores (7, 9) mencionados, que está configurado para calcular a partir del valor de medición de velocidad (vr) , su sello de tiempo (TS1) y la primera zona de detección (8) , así como a partir del valor de medición de geometría (L) , su sello de tiempo (TS2) y la segunda zona de detección (10) , el lugar y la hora en el que se espera el paso de un vehículo por la tercera zona de detección (12) a fin de determinar así la imagen que corresponde (B) en base a su sello de tiempo (TS3) y la tercera zona de detección (12) .
2. Dispositivo de control móvil según la reivindicación 1 para el control de vehículos equipados con OBUs DSRC, además con: un transceptor DSRC (13) para la comunicación DSRC (14) con OBUs DSRC (15) de vehículos (4) que pasan por una cuarta zona de detección (16) , proporcionando este transceptor DSRC (13) un sello de tiempo (TS4) a la comunicación DSRC (14) de cada paso de vehículo; y estando configurado además el dispositivo de evaluación (17) para determinar en base a su sello de tiempo (TS4) y a la cuarta zona de detección (16) la comunicación DSRC (14) que corresponde a la imagen determinada (B) .
3. Dispositivo de control móvil según la reivindicación 2, caracterizado porque la primera y la cuarta zona de detección (8, 16) son iguales y el sensor de medición de velocidad (7) está formado por el propio transceptor DSRC (13) .
4. Dispositivo de control móvil según la reivindicación 1 ó 2, caracterizado porque el sensor de medición de velocidad (7) está formado por un escáner láser.
5. Dispositivo de control móvil según una de las reivindicaciones 2 a 4, caracterizado porque la segunda y la cuarta zona de detección (10, 16) son iguales y el sensor de medición de geometría (9) está formado por el transceptor DSRC (13) que en el marco de una comunicación DSRC (14) recibe del OBU DSRC (15) datos del vehículo, a partir de los que calcula una geometría, preferentemente la longitud (L) , del vehículo (4) .
6. Dispositivo de control móvil según una de las reivindicaciones 1 a 4, caracterizado porque el sensor de medición de geometría (9) está formado por un escáner láser.
7. Dispositivo de control móvil según la reivindicación 6, caracterizado porque el escáner láser (9) detecta la altura de vehículo o el número de ejes, a partir de lo que determina la geometría correspondiente, preferentemente la longitud (L) , del vehículo (4) por medio de una tabla de alturas de vehículo o número de ejes y geometrías de vehículo asignadas.
8. Procedimiento para el control de vehículos con los siguientes pasos, en cualquier orden: medir la velocidad de un vehículo (4) que pasa por una primera zona de detección (8) y proporcionar un sello de tiempo (TS1) al valor de medición de velocidad (vr) ; medir al menos indirectamente una geometría, con preferencia la longitud, de un vehículo (4) que pasa por una segunda zona de detección (10) y proporcionar un sello de tiempo (TS2) al valor de medición de geometría (L) ; grabar imágenes (B) de vehículos (4) que pasan por una tercera zona de detección (12) y proporcionar un sello de tiempo (TS3) a cada imagen (B) ; y además con los pasos siguientes: calcular a partir del valor de medición de velocidad (vr) , su sello de tiempo (TS1) y la primera zona de detección (8) , así como a partir del valor de medición de geometría (L) , su sello de tiempo (TS2) y la segunda zona de detección (10) , el lugar y la hora en el que se espera el paso de un vehículo por la tercera zona de detección (12) ; y determinar así la imagen que corresponde (B) en base a su sello de tiempo (TS3) y a la tercera zona de detección (12) .
9. Procedimiento según la reivindicación 8 para el control de vehículos equipados con OBUs DSRC, además con los pasos:
ejecutar comunicaciones DSRC (14) con los OBUs DSRC (15) de vehículos (4) que pasan por una cuarta zona de detección (16) y proporcionar un sello de tiempo (TS4) a cada comunicación DSRC (14) ; y determinar en base a su sello de tiempo (TS4) y a la cuarta zona de detección (16) la comunicación DSRC (14) que corresponde a la imagen determinada (B) .
10. Procedimiento según la reivindicación 9, caracterizado porque la primera y la cuarta zona de detección (8, 16) son iguales y la velocidad (vr) se mide mediante la medición Doppler de la comunicación DSRC (14) .
11. Procedimiento según la reivindicación 8 ó 9, caracterizado porque la velocidad se mide con un escáner láser o mediante la evaluación de dos imágenes sucesivas de una cámara.
12. Procedimiento según una de las reivindicaciones 9 a 11, caracterizado porque la segunda y la cuarta zona de detección (10, 16) son iguales y en el marco de una comunicación DSRC (14) se reciben del OBU DSRC
(15) datos del vehículo, a partir de los que se calcula una geometría, preferentemente la longitud (L) , del vehículo (4) .
13. Procedimiento según una de las reivindicaciones 8 a 11, caracterizado porque la geometría se mide con un escáner láser (9) .
14. Procedimiento según la reivindicación 13, caracterizado porque con el escáner láser (9) se detecta la altura de vehículo y a partir de ésta se determina la geometría correspondiente, preferentemente la longitud (L) , del vehículo (4) por medio de una tabla de alturas de vehículo y geometrías de vehículo asignadas.
15. Procedimiento según una de las reivindicaciones 8 a 14, caracterizado porque éste se ejecuta desde un vehículo de control (1) en marcha.
REFERENCIAS CITADAS EN LA DESCRIPCIÓN
Esta lista de referencias citadas por el solicitante es únicamente para la comodidad del lector. No forma parte del documento de la patente europea. A pesar del cuidado tenido en la recopilación de las referencias, no se pueden 5 excluir errores u omisiones y la EPO niega toda responsabilidad en este sentido.
Documentos de patente citados en la descripción10 US20080077312A [0002]
Patentes similares o relacionadas:
PROCEDIMIENTO PARA LA MEDICIÓN PUNTUAL DE VELOCIDAD DE VEHÍCULOS A MOTOR, del 3 de Mayo de 2018, de UNIVERSIDAD DE ALCALA.: Procedimiento para la medición puntual de la velocidad de vehículos a motor, mediante al menos dos cámaras en un punto , apuntando a dos regiones […]
Procedimiento para la medición puntual de velocidad de vehículos a motor en tramo corto con geometría de mínimo error, del 30 de Abril de 2018, de UNIVERSIDAD DE ALCALA.: Procedimiento para la medición puntual de velocidad de vehículos a motor en tramo corto con geometría de mínimo error. La invención se refiere a un procedimiento […]
Procedimiento para detectar excesos de velocidad con almacenamiento restrictivo, del 6 de Septiembre de 2017, de JENOPTIK ROBOT GMBH: Procedimiento para la detección de excesos de velocidad con almacenamiento restrictivo de datos, en el que vehículos circulan a través […]
 Procedimientos y dispositivos para la toma de imágenes de un vehículo que supera una velocidad, del 16 de Febrero de 2016, de KAPSCH TRAFFICCOM AG: Procedimiento para la toma de imágenes de vehículos que recorren un tramo entre una entrada y una salida con velocidad demasiado alta, que […]
Procedimientos y dispositivos para la toma de imágenes de un vehículo que supera una velocidad, del 16 de Febrero de 2016, de KAPSCH TRAFFICCOM AG: Procedimiento para la toma de imágenes de vehículos que recorren un tramo entre una entrada y una salida con velocidad demasiado alta, que […]
Procedimiento para captar de forma concluyente la velocidad de un vehículo, del 1 de Julio de 2015, de JENOPTIK ROBOT GMBH: Procedimiento para medir la velocidad de un vehículo, en el que - un aparato de radar dirige una radiación de radar sobre una carretera de modo que al mismo […]
Método para detectar infracciones del límite de velocidad de un vehículo, del 26 de Noviembre de 2014, de KAPSCH TRAFFICCOM AG: Un método para detectar una infracción de la velocidad de un vehículo que se desplaza desde un primer sistema de carretera (G1) hasta un segundo sistema de carretera […]
Dispositivos y método para controlar un sistema de peaje de carreteras, del 24 de Septiembre de 2014, de KAPSCH TRAFFICCOM AG: Un dispositivo de control para un sistema de peaje de carreteras que se basa en unidades de a bordo transportadas por vehículos , que comprende: al […]
 Método de control para un sistema de peaje de carreteras, del 13 de Agosto de 2014, de KAPSCH TRAFFICCOM AG: Un método de control para un sistema de peaje de carreteras que se basa en unidades de a bordo transportadas por vehículos que tienen números […]
Método de control para un sistema de peaje de carreteras, del 13 de Agosto de 2014, de KAPSCH TRAFFICCOM AG: Un método de control para un sistema de peaje de carreteras que se basa en unidades de a bordo transportadas por vehículos que tienen números […]