SISTEMA DE DIRECCIÓN, EN PARTICULAR PARA VEHÍCULOS INDUSTRIALES CON VARIOS EJES DE DIRECCIÓN.
Sistema de dirección particularmente para vehículos industriales pesados con más de un eje de dirección (20),
que comprende: - una dirección de potencia hidráulica fija en el bastidor del vehículo y que comprende un eje de rotación (60); - al menos una palanca de dirección (40) conectada a dicho eje de rotación (60); - al menos un sensor angular de dirección (10) para detectar el ángulo de dirección de las ruedas, estando colocado dicho sensor angular (10) cerca del bastidor del vehículo en un punto lejos de cada uno de dichos más de un eje de dirección (20), y conectado a dicho eje de rotación (60) por medio de un mecanismo cinemático (11, 12), conectado a su vez a dicha dirección de potencia hidráulica, comprendiendo dicho mecanismo cinemático (11, 12) una primera rueda dentada (11) conectada al eje de rotación (60), y una segunda rueda dentada (12) adecuada para transmitir la rotación de dicha primera rueda dentada (11) a dicho sensor angular (10) caracterizado porque dicho eje de rotación (60) está provisto de una tuerca de ajuste (61) para apretar dicha palanca de dirección de potencia hidráulica (40) en el eje de rotación (60) y dicha rueda dentada (11) tiene una forma anular con un perfil interno que se combina con el perfil de la tuerca de ajuste (61)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08425446.
B62D15/02TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 15/00 Direcciones no previstas en otro lugar. › Indicadores de dirección.
B62D7/14B62D […] › B62D 7/00 Timonería de dirección; Manguetas o su montaje (B62D 13/00 tiene prioridad; dirección asistida o de relé de potencia B62D 5/00). › estando los ejes de giro situados en más de un plano perpendicular al eje longitudinal del vehículo, p. ej. siendo directrices todas las ruedas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Sistema de dirección, en particular para vehículos industriales con varios ejes de dirección [0001] La presente invención se refiere a un sistema de dirección para vehículos industriales pesados con más ejes de dirección que comprenden un sensor angular de dirección. [0002] En la actualidad, en los vehículos pesados, en particular en los vehículos industriales pesados con más ejes de dirección, se conoce en la técnica el uso de sistemas de dirección hidráulicos que controlan sustancialmente la dirección de un eje trasero motriz, estando conectado y coordinado el movimiento de la dirección del eje motriz por medio de un circuito hidráulico y actuadores hidráulicos, con respecto al movimiento de la dirección del eje delantero. [0003] Sin embargo, en los vehículos de última generación, además del eje delantero y de dicho eje trasero motriz equipado con un sistema de dirección hidráulico, existe un tercer eje adicional, en una posición longitudinalmente intermedia entre el eje delantero y el eje trasero motriz. Este eje adicional puede proporcionarse ventajosamente con un sistema de dirección electrónico, que es una dirección cuyo movimiento se controla por un actuador conectado a una unidad de control electrónica que recibe la indicación sobre el ángulo de dirección del eje principal detectado por un sensor angular. [0004] Por lo tanto, la presente invención se emplea en vehículos con dos o tres ejes de dirección provistos de dichos sistemas de dirección asistidos electrónicamente. [0005] En particular, en dichos sistemas de dirección existe al menos un sensor angular que detecta en cada momento la inclinación, o la dirección y el ángulo de las ruedas del eje delantero. Por lo tanto, por medio de una unidad de control electrónica y de un sistema de activación, controlan la dirección del eje adicional. [0006] Con la presencia del sistema de dirección asistido electrónicamente, el conductor no hace ningún esfuerzo adicional y la maniobrabilidad del vehículo mejora mucho sin perjudicar la comodidad del conductor. [0007] El sistema de dirección está constituido de diferentes componentes, tales como la caja de guía hidráulica, palancas de dirección, varillas de tensión y otros componentes de acuerdo con lo que se conoce en la técnica. El sensor angular se coloca respecto a dichos elementos, detecta el ángulo de dirección de las ruedas del eje delantero y envía los datos a la unidad de control que controla el actuador de dirección en el eje adicional. [0008] El posicionado del sensor angular es complejo, ya que tiene que colocarse con el objeto de que esté protegido de golpes accidentales y de los elementos mecánicos que controlan la dirección, los elementos de suspensión y elementos mecánicos similares. [0009] El documento US-6763906-B1 muestra un sistema de dirección correspondiente al preámbulo de la reivindicación 1. [0010] La principal tarea de la presente invención es proporcionar un sistema de dirección del tipo que comprende un sensor angular para detectar el ángulo de dirección en un eje, caracterizado porque está conectado a un sensor de dirección colocado en el bastidor del vehículo, en una posición protegido de golpes accidentales y protegido de los elementos mecánicos que incluyen el eje en el que se coloca el sensor. [0011] En el alcance de esta tarea, el objetivo de la presente invención es proporcionar un sistema de conexión de un sensor de dirección en el bastidor de un vehículo, el cual es de fácil fabricación y, por lo tanto, de fácil mantenimiento y que garantiza un montaje estable del sensor. [0012] Esta tarea y estos y otros fines que se explican a continuación se consiguen mediante un sistema de dirección que se describe en la reivindicación 1. Serán evidentes características adicionales y ventajas de la presente invención a partir de la siguiente descripción detallada, que es meramente ilustrativa y no limitante y se muestra en las figuras que se adjuntan a la misma, en las que: la fig. 1 muestra un eje de vehículo que comprende un sistema de dirección con un sensor angular situado de acuerdo con lo que se conoce en la técnica; la fig. 2 muestra esquemáticamente el bastidor y un eje de un vehículo que comprende el sistema de dirección de acuerdo con la presente invención; la fig. 3 muestra un detalle del sistema de dirección de acuerdo con la presente invención; 2 la fig. 4 muestra una vista de un detalle del sistema de dirección de acuerdo con la presente invención; la fig. 5 muestra parcialmente una vista despiezada de un mecanismo cinemático del sistema de dirección de acuerdo con la presente invención. [0013] La figura 1 muestra un sistema de dirección de acuerdo con lo que se conoce en la técnica. [0014] Para los vehículos industriales con más ejes de dirección, se conocen en la técnica sistemas en los que el sensor angular 10 se monta directamente en el eje delantero 20, cerca de la unidad de suspensión de rueda. En esta configuración, el sensor 10 gira en un plano horizontal, detectando el ángulo de dirección. De acuerdo con dicha configuración, el sensor 10 está expuesto a golpes accidentales debido al movimiento de la suspensión causado por las irregularidades del suelo. Además, está colocado cerca de los elementos mecánicos de la unidad de dirección, de la suspensión y de los frenos. [0015] La figura 2 muestra un bastidor de vehículo al que se conecta un primer eje 20 y que comprende el sistema de dirección de acuerdo con la presente invención. [0016] También con referencia a la figura 2, el sistema de dirección de acuerdo con la presente invención comprende un sensor angular 10 situado lejos del eje de rueda 20. En particular, la figura 3 muestra que el sensor angular 10 está conectado al bastidor del vehículo y que no recibe el movimiento directamente de las ruedas, que son los elementos del cuadrilátero articulado los que realizan la dirección, como en el sistema conocido, pero recibe el movimiento directamente de la caja de guía hidráulica 50 que controla la dirección del eje delantero 20. [0017] La caja de guía hidráulica 50 gobierna la dirección del eje delantero 20 por medio de un sistema de palancas. En particular, con referencia, por ejemplo, a la figura 4, desde la guía hidráulica 50 se conecta una primera palanca de la guía hidráulica 40 a una varilla de tensión 30 que maniobra la dirección del eje 20. De esta manera, la guía hidráulica 50 asiste a la dirección de la rueda del primer eje 20. [0018] Haciendo referencia en particular a la figura 3, la palanca de guía hidráulica 40 está conectada a la caja de guía hidráulica 50 por medio de medios de transmisión de movimiento que, en la realización mostrada en este documento, la cual es meramente ilustrativa, se componen por un eje 60. También puede haber una tuerca de ajuste 61 para bloquear dicha palanca 40 en el eje 60, de forma que se asegure la transmisión del movimiento giratorio del eje 60 desde la caja de guía hidráulica 50 hasta la palanca de guía hidráulica 40. [0019] Por medio de esta conexión, el movimiento giratorio del eje 60 alrededor de su eje se transforma en un movimiento giratorio de la palanca de guía hidráulica 40 alrededor del centro de giro 60. Después, la palanca 40 se conecta a la varilla de tensión 30 que ejerce un empuje y/o una acción de tracción sobre el mecanismo cinemático de la dirección del eje 20, no mostrado en las figuras. [0020] Con el fin de transmitir el movimiento del eje 60 de la caja de guía hidráulica al sensor angular 10 existe un mecanismo cinemático 11, 12. [0021] Más en particular, una primera rueda dentada 11 está conectada al eje 60, como se muestra en la vista despiezada de la figura 5. La primera rueda dentada 11 tiene una forma sustancialmente anular a fin de que el perfil interno de la rueda dentada se combine con el perfil de la tuerca de ajuste 61 que está en el eje para conectar la palanca de guía hidráulica 40. [0022] De esta manera, la rueda dentada 11 puede conectarse fácilmente, sin ninguna modificación o elementos adicionales, al eje 60 de la caja de guía hidráulica 50, como se muestra en la figura 3. [0023] Una segunda rueda dentada 12, adecuada para acoplarse con la primera rueda dentada 11, se conecta al sensor angular 10. [0024] Más en particular, con referencia a la figura 5, la segunda rueda dentada 12 tiene un perno axial 12a en conjunto con éste y adecuado para conectarse a dicho sensor angular 10. Por medio del perno axial 12a la rotación del segundo sensor angular 12, inducida por la rotación de la primera rueda dentada 11 que gira en conjunto con el eje 60 del mecanismo de guía hidráulica, el sensor angular 10 recibe el movimiento de la dirección. [0025] Además, ventajosamente, varias escuadras de soporte 13, 14 permiten que el sensor angular 10 y la segunda rueda dentada 12 se conecten... [Seguir leyendo]
Reivindicaciones:
1. Sistema de dirección particularmente para vehículos industriales pesados con más de un eje de dirección (20), que comprende: - una dirección de potencia hidráulica fija en el bastidor del vehículo y que comprende un eje de rotación (60); - al menos una palanca de dirección (40) conectada a dicho eje de rotación (60); - al menos un sensor angular de dirección (10) para detectar el ángulo de dirección de las ruedas, estando colocado dicho sensor angular (10) cerca del bastidor del vehículo en un punto lejos de cada uno de dichos más de un eje de dirección (20), y conectado a dicho eje de rotación (60) por medio de un mecanismo cinemático (11, 12), conectado a su vez a dicha dirección de potencia hidráulica, comprendiendo dicho mecanismo cinemático (11, 12) una primera rueda dentada (11) conectada al eje de rotación (60), y una segunda rueda dentada (12) adecuada para transmitir la rotación de dicha primera rueda dentada (11) a dicho sensor angular (10) caracterizado porque dicho eje de rotación (60) está provisto de una tuerca de ajuste (61) para apretar dicha palanca de dirección de potencia hidráulica (40) en el eje de rotación (60) y dicha rueda dentada (11) tiene una forma anular con un perfil interno que se combina con el perfil de la tuerca de ajuste (61). 2. Sistema de dirección de acuerdo con la reivindicación 1, en el que dicha dirección de potencia hidráulica (50) controla la dirección de dichos más de un eje de dirección (20) por medio de barras de dirección. 3. Sistema de dirección de acuerdo con la reivindicación 2, en el que dicho eje de rotación (60) sale de dicha dirección de potencia hidráulica (50), y en el que las barras de dirección comprenden adicionalmente al menos una varilla de tensión (30) con un extremo articulado a dicha palanca de dirección de potencia hidráulica (40) y con otro extremo conectado a un cuadrilátero articulado de dirección de dicho eje de dirección (20). 4. Sistema de dirección de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que dicho sensor angular (10) está conectado al bastidor del vehículo por medio de escuadras de soporte (13, 14). 5. Sistema de dirección de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que dichas escuadras de soporte (13, 14) soportan dicha segunda rueda dentada (12) dejando que gire libremente alrededor de su eje. 6. Sistema de dirección de acuerdo con una cualquiera de las reivindicaciones anteriores, en el que dicho sensor angular (10) controla un dispositivo electrónico para la dirección de las ruedas de un eje adicional suministrado con el sistema de dirección electrónico. 7. Vehículo que comprende un sistema de dirección de acuerdo con las reivindicaciones anteriores. 6 7 8 9 REFERENCIAS CITADAS EN LA DESCRIPCIÓN Esta lista de referencias citadas por el solicitante es sólo para la comodidad del lector. No forma parte del documento de patente europea. Aunque se ha tomado especial cuidado en la compilación de las referencias, no se pueden excluir errores u omisiones y la OEP rechaza toda responsabilidad a este respecto. Documentos de patentes citados en la descripción
Patentes similares o relacionadas:
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende:
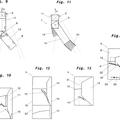
tras la recepción , por un vehículo […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende
• un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Sistemas y método de ayuda a la conducción de vehículos, del 19 de Febrero de 2020, de Siemens Mobility S.A.S: Sistema de ayuda a la conduccion de un vehiculo , dicho sistema comprende:
un dispositivo de determinacion de trayectoria capaz de determinar una trayectoria para […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Dispositivo de asistencia para maniobras de atraque en una dársena, del 16 de Octubre de 2019, de NEWTL (Société par Actions Simplifiée): Vehículo de carretera que incluye ruedas delanteras montadas en un eje de dirección delantero y ruedas traseras montadas en un eje trasero […]
Procedimiento y dispositivo para adaptar un ángulo de volante de un volante y un ángulo de dirección de ruedas de una dirección de ruedas en un vehículo tras una maniobra de conducción automatizada efectuada, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para adaptar un ángulo de volante real de un volante y un ángulo de dirección de ruedas real de una dirección de ruedas […]
Sistema de asistencia al conductor, del 11 de Junio de 2019, de ROBERT BOSCH GMBH: Sistema de asistencia al conductor para vehículos a motor, que comprende:
- un regulador de guiado longitudinal , el cual está configurado […]
Procedimiento para aparcar de manera, al menos parcialmente, autónoma un vehículo motorizado en un hueco de aparcamiento con un escalón, sistema de asistencia al conductor y vehículo motorizado, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Un procedimiento para aparcar un vehículo motorizado de manera, al menos parcialmente, autónoma en hueco de aparcamiento con un escalón detectado […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]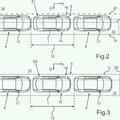 Procedimiento para aparcar de manera, al menos parcialmente, autónoma un vehículo motorizado en un hueco de aparcamiento con un escalón, sistema de asistencia al conductor y vehículo motorizado, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Un procedimiento para aparcar un vehículo motorizado de manera, al menos parcialmente, autónoma en hueco de aparcamiento con un escalón detectado […]
Procedimiento para aparcar de manera, al menos parcialmente, autónoma un vehículo motorizado en un hueco de aparcamiento con un escalón, sistema de asistencia al conductor y vehículo motorizado, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Un procedimiento para aparcar un vehículo motorizado de manera, al menos parcialmente, autónoma en hueco de aparcamiento con un escalón detectado […]