PROCEDIMIENTO DE PREVENCIÓN DE SOBREVIRAJES Y VEHÍCULO AUTOMÓVIL EQUIPADO CON DIRECCIÓN ASISTIDA QUE PREVIENE LOS SOBREVIRAJES.
Un procedimiento de prevención de sobrevirajes al volante de un vehículo,
en particular de un vehículo automóvil, equipado con un sistema de dirección asistida eléctrico para orientar un tren de ruedas directrices (1) equipadas con neumáticos y unidas a una cremallera (6) cuyo movimiento resulta de un esfuerzo Fcrem(t) unido al comportamiento de los neumáticos bajo deformación, del par aplicado por el volante (Cvolante) aplicado por el volante (2) y del par de asistencia (Casistencia) aplicada por un motor eléctrico (5), caracterizado por que se genera una señal cuando el esfuerzo sobre la cremallera Fcrem(t) disminuye con respecto al esfuerzo lateral Fyav(t) y la velocidad de rotación ωvolante del volante (2) es superior a una velocidad de umbral dada ωumbral durante una duración Δt dada.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07301416.
Solicitante: PEUGEOT CITROEN AUTOMOBILES S.A..
Nacionalidad solicitante: Francia.
Dirección: ROUTE DE GISY 78140 VELIZY VILLACOUBLAY FRANCIA.
Inventor/es: Nouillant,Cédric, Pengov,Marco, Golven,Guillaume.
Fecha de Publicación: .
Fecha Solicitud PCT: 28 de Septiembre de 2007.
Clasificación PCT:
- B62D6/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Dispositivos para el control automático de la dirección en función de las condiciones de conducción, que son detectadas y para las cuales es aplicada una reacción (medios para producir un cambio en la dirección del vehículo B62D 1/00; válvulas de control de la dirección B62D 5/06; combinados con medios para inclinar el vehículo o las ruedas en los giros B62D 9/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2366966_T3.pdf
Fragmento de la descripción:
El presente invento se refiere a un procedimiento de prevención de sobrevirajes al volante de un vehículo automóvil. Se refiere igualmente a un vehículo automóvil equipado con una dirección asistida que previene los sobrevirajes.
Estudios recientes sobre las causas de los accidentes de carretera muestran que a menudo un accidente se produce con un solo vehículo en el que el acontecimiento que inicia el accidente es un error de trayectoria debido a un fallo del conductor. Los sistemas de seguridad activa intentan corregir errores eventuales de conducción propios del conductor. Este es en particular el caso del sistema ABS que evita el bloqueo de las ruedas durante un frenado insistente mejorando así la distancia de frenado y el control de la trayectoria del vehículo. Este es igualmente el caso del sistema EPS que corrige la trayectoria por acción de frenado diferencial comparando las acciones del conductor sobre el volante y el pedal, en el comportamiento del vehículo, al nivel de la velocidad en curva y de la aceleración lateral.
En el caso de un sistema ESP, se deduce una trayectoria deseada por el conductor basándose en una medida de la posición del volante. Ahora bien sucede en muchos casos de pánico, en situación de provocación de accidente, que el conductor ejecuta acciones al volante desproporcionadas con respecto al potencial físico de su vehículo. Así, puede que la trayectoria interpretada por acciones al volante no sea definitivamente ya una referencia adecuada a perseguir.
Por ejemplo, el documento US-2005/04796 describe un procedimiento de prevención de sobrevirajes correspondiente al preámbulo de las reivindicaciones 1 y 8 del presente invento.
Un propósito del presente invento es particularmente prevenir una acción exagerada de un conductor en situación de pánico que pueda llevar a un accidente. A este efecto, el invento tiene por objeto un procedimiento de prevención de sobrevirajes al volante de un vehículo, en particular de un vehículo automóvil, equipado de un sistema de dirección asistida eléctrica para orientar un tren de ruedas directrices equipadas con neumáticos y unidas a una cremallera cuyo movimiento es el resultado de un esfuerzo Fcrem(t) unido al comportamiento de los neumáticos bajo deformación, del par aplicado por el volante y del par de asistencia aplicado por un motor eléctrico, generándose una señal cuando el esfuerzo sobre la cremallera Fcrem(t) disminuye con respecto al esfuerzo lateral Fyav(t) y la velocidad de rotación volante del volante es superior a una velocidad de umbral dada umbral durante una duración t dada.
Ventajosamente:
- un residuo función del tiempo r(t) es definido a partir del esfuerzo Fcrem(t) ejercido sobre la cremallera y del esfuerzo lateral Fyav(t) ejercido sobre los neumáticos de las ruedas directrices según la relación siguiente:
r(t) = p.Fyav(t) - Fcrem(t) – r0
donde p es el parámetro de pendiente lineal de la curva característica de Fcrem(t) en función de Fyav(t) en su zona lineal y r0 es la ordenada e el origen, para Fyav = 0;
- una señal es generada cuando el residuo r(t) es superior a un umbral dado rumbral y la velocidad de rotación ωvolante del volante es superior a una velocidad de umbral dada ωumbral durante la duración t dada.
Con el fin de explotar en particular mejor las informaciones, por ejemplo,
- una información booleana es generada en función del tiempo sr(t) a partir del residuo r(t):
sr(t) = 1 si r(t) rumbral si no sr(t) = 0;
- una información booleana es generada en función del tiempo sv(t) a partir de la velocidad del volante volante(t)
sv(t) = 1 si volante(t) umbral durante la duración dada t,
si no sv(t) = 0
siendo generada la señal cuando el producto sr(t).sv(t) es igual a 1.
La señal es aplicada por ejemplo sobre el motor eléctrico en forma de un par de frenado Cp(t) que limita la rotación del volante. El par de frenado puede ser Cp(t) = -b x (ωvolante (t) -ωumbral), siendo b un coeficiente de viscosidad. La señal genera por ejemplo una acción sobre el pedal del acelerador del vehículo. De forma acumulativa o no, la señal puede ser una señal de alerta luminosa y/o sonora.
El invento tiene así por objeto un vehículo, en particular un vehículo automóvil, equipado con una dirección asistida eléctrica para orientar un tren de ruedas directrices equipadas con neumáticos y unidas a una cremallera cuyo movimiento es mandado por un esfuerzo Fcrem(t) que resulta del par aplicado por el volante y del par de asistencia aplicado por un motor eléctrico de la dirección asistida, siendo el esfuerzo Fcrem(t) ejercido sobre la cremallera función creciente del esfuerzo lateral Fyav(t) ejercido sobre los neumáticos de las ruedas directrices y luego decreciente, el sistema de dirección asistida incluye un módulo que crea una señal cuando el esfuerzo sobre la cremallera Fcrem(t) disminuye con respecto al esfuerzo lateral Fav(t) y la velocidad de rotación ωvolante del volante es superior a una velocidad de umbral dada ωumbral durante una duración t dada.
Ventajosamente, el módulo define un residuo en función del tiempo r(t) a partir del esfuerzo Fcrem(t) ejercido sobre la cremallera y del esfuerzo lateral Fyav(t) ejercido sobre los neumáticos de las ruedas directrices (1) según la relación siguiente:
R(t) = p.Fyav(t) – Fcrem(t) – r0
donde p es el parámetro de pendiente lineal de la curva característica de Fcrem(t) en función de Fyav(t) en su zona lineal y r0 es la ordenada en el origen, para Fyav = 0;
siendo generada la señal cuando el residuo r(t) es superior a un umbral dado rumbral y la velocidad de rotación ωvolante del volante (2) superior a una velocidad de umbral dada ωumbral durante la duración t dada.
Otras características y ventajas del invento aparecerán con la ayuda de la descripción siguiente hecha con referencia a los dibujos adjuntos que representan:
La fig. 1, por un esquema simplificado, los elementos de una dirección asistida que unen un volante a las ruedas directrices de un vehículo;
La fig. 2, curvas representativas del par de auto-alineación y del esfuerzo lateral que se ejerce sobre los neumáticos de las ruedas directrices;
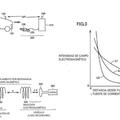
La fig. 3, curvas características que proporcionan el esfuerzo ejercido sobre la cremallera de la dirección asistida en función del esfuerzo lateral.
La fig. 1 ilustra, por un esquema, una dirección asistida eléctrica que equipa un vehículo automóvil. Este vehículo automóvil comprende ruedas delanteras 1, más generalmente ruedas directrices, provistas de neumáticos y un sistema de dirección asistida eléctricamente que une un volante 2 a las ruedas 1. El volante 2 transmite a un piñón 3 su movimiento de rotación por medio de una columna 4. El piñón 3 es por otra parte activado en rotación por un motor eléctrico 5 para la dirección asistida. El piñón 3 coopera con una cremallera 6 para transmitirle un movimiento lineal según un eje 9. Una bieleta 7, 8 une cada rueda 1 a una extremidad de la cremallera para permitir la transformación de su movimiento lineal en un movimiento de rotación aplicado a las ruedas alrededor de un eje de pivotamiento vertical z1, z2. El sistema de dirección comprende un dispositivo de asistencia eléctrico del que sólo se ha representado el motor 5. Este dispositivo de asistencia incluye por ejemplo un captador para medir el par ejercido sobre el volante, un calculador que recibe el par medido por el captador de par y el motor eléctrico 5. El calculador manda, a través de las interfaces apropiadas, al motor 5 que aplica así un par de asistencia sobre el piñón 3.
La fig. 2 ilustra, por una primera curva 21, el par de auto-alineación de un neumático de una rueda 1. Más precisamente, la curva 21 presenta el par de auto-alineación en función de un ángulo . Este ángulo representa el ángulo de deriva del neumático; es de hecho el ángulo que forma el neumático con el vector velocidad en el punto de contacto del neumático sobre el suelo. Traduce el hecho de que el neumático no está completamente dirigido en su dirección de desplazamiento, representada por el vector de velocidad citado previamente. Este fenómeno... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento de prevención de sobrevirajes al volante de un vehículo, en particular de un vehículo automóvil, equipado con un sistema de dirección asistida eléctrico para orientar un tren de ruedas directrices (1) equipadas con neumáticos y unidas a una cremallera (6) cuyo movimiento resulta de un esfuerzo Fcrem(t) unido al comportamiento de los neumáticos bajo deformación, del par aplicado por el volante (Cvolante) aplicado por el volante (2) y del par de asistencia (Casistencia) aplicada por un motor eléctrico (5), caracterizado por que se genera una señal cuando el esfuerzo sobre la cremallera Fcrem(t) disminuye con respecto al esfuerzo lateral Fyav(t) y la velocidad de rotación ωvolante del volante (2) es superior a una velocidad de umbral dada ωumbral durante una duración t dada.
2. Un procedimiento según la reivindicación 1, caracterizado por que:
- un residuo función del tiempo r(t) es definido a partir del esfuerzo Fcrem(t) ejercido sobre la cremallera y del esfuerzo lateral Fyav(t) ejercido sobre los neumáticos de las ruedas directrices (1) según la relación siguiente:
r(t) = p.Fyav(t) - Fcrem(t) – r0
donde p es el parámetro de pendiente lineal de la curva característica (31, 32, 33) de Fcrem(t) en función de Fyav(t) en su zona lineal y r0 es la ordenada en el origen, para Fyav = 0;
- una señal es generada cuando el residuo r(t) es superior a un umbral dado rumbral y la velocidad de rotación ωvolante del volante (2) es superior a una velocidad de umbral dada ωumbral durante la duración t dada.
3. Un procedimiento según la reivindicación 2, caracterizado por que:
- una información booleana es generada en función del tiempo sr(t) a partir del residuo r(t):
sr(t) = 1 si r(t) rumbral si no sr(t) = 0;
- una información booleana es generada en función del tiempo sv(t) a partir de la velocidad del volante ωvolante(t)
sv(t) = 1 si ωvolante(t) ωumbral durante la duración dada t,
si no sv(t) = 0
siendo generada la señal cuando el producto sr(t).sv(t) es igual a 1.
4. Un procedimiento según una cualquiera de las reivindicaciones precedentes, caracterizado por que la señal es aplicada sobre el motor eléctrico (5) en forma de un par de frenado Cp(t) que limita la rotación del volante (2).
5. Un procedimiento según la reivindicación 4, caracterizado por que el par de frenado es Cp(t) = -b x (ωvolante (t) -ωumbral), siendo b un coeficiente de viscosidad.
6. Un procedimiento según una cualquiera de las reivindicaciones precedentes, caracterizado por que la señal genera una acción sobre el pedal del acelerador del vehículo.
7. Un procedimiento según una cualquiera de las reivindicaciones precedentes, caracterizado por que la señal es una señal de alerta luminosa y/o sonora.
8. Un vehículo, en particular un vehículo automóvil, equipado con una dirección asistida eléctrica para orientar un tren de ruedas directrices (1) equipadas con neumáticos y unidas a una cremallera (6) cuyo movimiento es mandado por un esfuerzo Fcrem(t) que resulta del par (Cvolante) aplicado por el volante (2) y del par de asistencia (Casistencia) aplicado por un motor eléctrico (5) de la dirección asistida, caracterizado por que siendo el esfuerzo Fcrem(t) ejercido sobre la cremallera función (31, 32, 33) creciente del esfuerzo lateral Fyav(t) ejercido sobre los neumáticos de las ruedas directrices (1) luego decreciente, el sistema de dirección asistida incluye un módulo que crea una señal cuando el esfuerzo sobre la cremallera Fcrem(t) disminuye con relación al esfuerzo lateral Fav(t) y la velocidad de rotación ωvolante del volante es superior a una velocidad de umbral dada ωumbral durante una duración t dada.
9. Un vehículo automóvil según la reivindicación 9, caracterizado por que el módulo define un residuo en función del tiempo r(t) a partir del esfuerzo Fcrem(t) ejercido sobre la cremallera y del esfuerzo lateral Fyav(t) ejercido sobre los neumáticos de las ruedas directrices (1) según la relación siguiente:
r(t) = p.Fyav(t) – Fcrem(t) – r0
donde p es el parámetro de pendiente lineal de la curva característica (31, 32, 33) de Fcrem(t) en función de Fyav(t) en su zona lineal y r0 es la ordenada en el origen, para Fyav = 0; siendo la señal generada cuando el residuo r(t) es superior a un umbral dado rumbral y la velocidad de rotación ωvolante del volante es superior a una velocidad de umbral dada ωumbral durante la duración t dada.
Patentes similares o relacionadas:
 Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
Sistema de alimentación de energía para vehículos y vehículo de tracción eléctrica, del 25 de Diciembre de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de alimentación de energía para vehículos para la alimentación de energía eléctrica desde una unidad de transmisión de energía de un dispositivo de […]
Procedimiento para el control de la dirección y el comportamiento de un vehículo, del 13 de Noviembre de 2019, de Sentient IP AB: Un procedimiento para controlar un accionador de par de torsión de retroalimentación y al menos un accionador de guiñada y/o del estado lateral del vehículo, tal como […]
 Método para controlar la dirección de vehículos y el comportamiento de vehículos, del 31 de Julio de 2019, de Sentient IP AB: Un método para controlar uno o más actuadores de dirección en un sistema de dirección en un vehículo que incorpora las siguientes etapas de […]
Método para controlar la dirección de vehículos y el comportamiento de vehículos, del 31 de Julio de 2019, de Sentient IP AB: Un método para controlar uno o más actuadores de dirección en un sistema de dirección en un vehículo que incorpora las siguientes etapas de […]
Sistema de modificación de la relación de dirección para vehículo con brazo telescópico y vehículo correspondiente, del 3 de Julio de 2019, de MANITOU BF: Sistema de modificación de la relación de dirección para un vehículo con brazo telescópico inclinable, comprendiendo el vehículo ruedas directrices […]
Procedimiento y dispositivo para adaptar un ángulo de volante de un volante y un ángulo de dirección de ruedas de una dirección de ruedas en un vehículo tras una maniobra de conducción automatizada efectuada, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para adaptar un ángulo de volante real de un volante y un ángulo de dirección de ruedas real de una dirección de ruedas […]
Máquina automóvil con instalación de carga, del 8 de Mayo de 2019, de Wacker Neuson Linz GmbH: Máquina automóvil con una instalación de carga , un accionamiento de rodadura y un tren de rodadura , tal como una cargadora de ruedas, una cargadora telescópica o similares, […]
Procedimiento de estabilización de conducción, dispositivo de estabilización de conducción y vehículo equipado con dicho dispositivo, del 6 de Mayo de 2019, de WABCO GMBH: Procedimiento de estabilización de conducción en el que, para la estabilización de un vehículo , especialmente de un vehículo industrial, se cambia un ángulo […]
Sistema de guiado de vehículo, del 11 de Diciembre de 2018, de Topcon Precision Agriculture Pty Ltd: Una combinación de sistema de guiado de vehículo y mecanismo de volante para un vehículo, con el vehículo incluyendo un mecanismo de volante que incluye un volante […]