Procedimiento de automatización del giro de las ruedas de un vehículo automóvil cuando el vehículo sale de una plaza de aparcamiento, y sistema asociado.
Procedimiento de automatización del giro de las ruedas de un vehículo automóvil durante undesplazamiento de este vehículo para ayudar en la salida de una plaza de aparcamiento del tipo en línea hasta unlado de circulación (15),
incluyendo las siguientes etapas:
- detección del lado de desplazamiento (15) del vehículo deseado por el usuario (a),
- detección de la dirección hacia delante o hacia atrás del vehículo seleccionada por un usuario (d),
- determinación de las posiciones angulares óptimas para las ruedas directrices (3, 4) del vehículo en función dellado de desplazamiento deseado (15) y de la dirección seleccionada (e), calculadas por un calculador (22) enfunción de una situación de uso habitual del vehículo determinada por unos captadores del entorno (20),
- desplazamiento automatizado de las ruedas (3, 4) del vehículo a su posición de giro máximo de las ruedas (f)respecto de una posición neutra del lado del desplazamiento del vehículo deseada (15) cuando la marchadelantera del vehículo está seleccionada y del lado opuesto (14) al lado de desplazamiento deseado (15) cuandola marcha trasera está seleccionada,
estando caracterizado dicho procedimiento porque incluye una etapa previa de autorización de las etapas (d), (e), (f)si se estima que el vehículo está actualmente posicionado entre dos obstáculos.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07301650.
Solicitante: PEUGEOT CITROEN AUTOMOBILES S.A..
Nacionalidad solicitante: Francia.
Dirección: ROUTE DE GISY 78140 VELIZY VILLACOUBLAY FRANCIA.
Inventor/es: LEFRANC,Sébastien.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60W10/20 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 10/00 Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00). › incluyendo el control de sistemas de dirección.
- B60W30/06 B60W […] › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Maniobra automática de estacionamiento.
- B62D15/02 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 15/00 Direcciones no previstas en otro lugar. › Indicadores de dirección.
PDF original: ES-2388819_T3.pdf
Fragmento de la descripción:
Procedimiento de automatización del giro de las ruedas de un vehículo automóvil, cuando el vehículo sale de una plaza de aparcamiento, y sistema asociado
El invento se refiere a un procedimiento de automatización del giro de las ruedas de un vehículo automóvil durante un desplazamiento de este vehículo entre dos posiciones inicial y final tales como una plaza de aparcamiento y un lateral de la circulación.
El invento concierne igualmente un sistema de automatización del giro asociado al procedimiento anterior.
En el seno de un vehículo automóvil, la función de dirección está asegurada mediante la cooperación de un volante, una columna de dirección, un piñón, una cremallera y una bielita, y actúa sobre las ruedas directrices del vehículo, que son habitualmente las ruedas delanteras del vehículo.
Con el fin de reducir los esfuerzos realizados por un conductor durante las maniobras a baja velocidad de desplazamiento del vehículo, se han desarrollado unos dispositivos de asistencia.
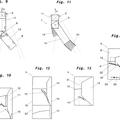
A título de ejemplo, un dispositivo de dirección asistida 1 del tipo conocido y representado en la figura 1, permite reducir el valor del esfuerzo de giro del volante por el conductor mediante la generación de un par de fuerzas que se superponen al par aplicado por el conductor.
Dicho dispositivo incluye, a imagen de un dispositivo de dirección clásico, un volante de dirección 2 unido mecánicamente a las ruedas directrices 3, 4 del vehículo por medio de un conjunto de columna de dirección 6, piñón 7 y cremallera 8. Así, cualquier giro del volante 2 conlleva el giro de las ruedas directrices 3, 4.
Además, dicho dispositivo incluye un motor eléctrico 9 interpuesto entre el volante 2 y las ruedas directrices 3, 4 del vehículo y que es apto para generar un par principalmente a nivel de los ejes de pivotamiento A3, A4 de las ruedas 3, 4 pudiendo superponerse a los pares aplicados en estos ejes mediante el accionamiento del volante 2 por el conductor. Debido a esta resistencia eléctrica, el esfuerzo a realizar por el conductor para girar las ruedas directrices 3, 4 del vehículo es menos importante.
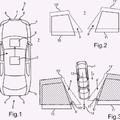
Una aplicación particular de este dispositivo concierne la ayuda al aparcamiento en línea de un vehículo 11 dispuesto longitudinalmente entre otros dos vehículos 12, 13, y la ayuda a la salida de una plaza de aparcamiento del tipo en línea, tal y como se ha representado respectivamente en las figuras 2 y 3.
A título de ejemplo, cuando el vehículo 11 está encerrado entre dos objetos 12, 13, tal y como se ha representado en la figura 4, es difícil salir de la plaza de aparcamiento.
La salida de la plaza de aparcamiento es entonces efectuada según las tres fases siguientes:
- alejamiento del vehículo 11 de la acera 14 que delimita la calzada mediante avance del vehículo (figura 5) , consistiendo esta primera fase en girar al máximo las ruedas directrices 3, 4 del vehículo 11 hacia el lado de vuelta a la circulación 15 para que alcancen una posición llamada exterior P1, mientras se avanza el vehículo 11 en el sentido referenciado por la flecha F1, lo más cerca del vehículo 12,
- sacar el vehículo de la plaza que ocupaba mediante retroceso de este (figura 6) , girando el conductor las ruedas
3, 4 al máximo hacia la acera 14 hasta la posición llamada interior P2, mientras retrocede el vehículo según la
flecha F2 de la figura 6 lo más cerca del vehículo 13,
- puesta en circulación del vehículo (figura 7) mediante giro máximo de las ruedas 3, 4 hacia el lado de la puesta en circulación 15 del vehículo y mediante avance de este último hacia el lado 15.
Así, en esta situación, cada maniobra de giro del volante es una maniobra de giro máximo y la reducción del esfuerzo a realizar por el conductor es cada vez más apreciable.
Así, el documento US6275754 describe un procedimiento de automatización del giro de las ruedas de un vehículo automóvil durante un desplazamiento de este vehículo entre dos posiciones inicial y final, tales como una plaza de parking y un lateral de circulación, incluyendo las siguientes etapas:
- detección del lado de desplazamiento del vehículo deseado por el usuario,
- detección de la dirección delantera o trasera del vehículo seleccionado por un usuario,
- determinación de las posiciones angulares óptimas para las ruedas directrices del vehículo en función del lado de
desplazamiento deseado y de la dirección seleccionada, calculadas mediante una calculadora en función de una
situación de vía habitual del vehículo determinada por unos captadores del entorno,
- desplazamiento automatizado de las ruedas del vehículo a su posición angular óptima.
Así, el documento EP1640213 describe el uso de un botón de activación accionable manualmente por el usuario, estando autorizada la activación del sistema por el botón cuando el vehículo es detectado como estando posicionado longitudinalmente entre dos obstáculos por los captadores del entorno.
Sin embargo, el número de maniobras necesarias para situar de nuevo el vehículo en circulación permanece importante y hace en consecuencia penosa su realización.
Se conoce igualmente por el documento WO2007/079825, considerado como el arte anterior más próximo, un procedimiento de asistencia de dirección semiautomático para la salida de un emplazamiento de aparcamiento conforme al preámbulo de la reivindicación 1.
Sin embargo, este documento no tiene en cuenta todas las informaciones del entorno del vehículo antes de comenzar la maniobra de salida del emplazamiento.
El invento tiene como objetivo paliar este inconveniente.
A este efecto, el invento concierne un procedimiento de automatización del giro de las ruedas de un vehículo automóvil durante un desplazamiento de este vehículo para la ayuda a la salida de una plaza de aparcamiento del tipo en línea hasta un lateral de la circulación, conforme a la parte caracterizante de la reivindicación 1.
Según otra característica, la detección del lateral de desplazamiento deseado es efectuada mediante adquisición de una señal proveniente de un indicador de cambio de posición del vehículo, tal como un intermitente derecho o izquierdo.
Preferentemente, el procedimiento incluye una etapa de verificación de una condición de no parada y una repetición de las etapas de detección de la marcha hacia adelante/hacia atrás seleccionada, de determinación de las posiciones angulares óptimas y del desplazamiento de las ruedas directrices mientras que la condición de no parada sea verificada.
Ventajosamente, la condición de no parada es verificada cuando la velocidad de desplazamiento del vehículo es inferior a un valor de velocidad umbral y/o cuando el par de fuerzas aplicado al volante es inferior a un valor de par umbral.
El invento concierne igualmente un sistema de automatización del giro de las ruedas de un vehículo automóvil durante un desplazamiento de este vehículo entre dos posiciones inicial y final, tales como una plaza de aparcamiento y un lateral de circulación. Dicho sistema incluye:
- un indicador de un lateral de desplazamiento deseado por el conductor, tal como un intermitente,
- un captador de la dirección delantera o trasera seleccionada por un usuario,
- un calculador apto para tomar las informaciones del indicador y del captador de dirección y hacer corresponder
una posición angular óptima para las ruedas directrices del vehículo, a determinar una consigna representativa de
las posiciones angulares óptimas, del entorno.
- un accionador del pivotamiento de las ruedas del vehículo apto para desplazar estas ruedas a sus posiciones definidas por la consigna, independientemente de las actuaciones del usuario,
Según el invento, dicho sistema incluye además un botón de activación accionable manualmente por el usuario, estando autorizada la activación del sistema mediante el botón cuando el vehículo es detectado como estando posicionado longitudinalmente entre... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de automatización del giro de las ruedas de un vehículo automóvil durante un desplazamiento de este vehículo para ayudar en la salida de una plaza de aparcamiento del tipo en línea hasta un lado de circulación (15) , incluyendo las siguientes etapas:
- detección del lado de desplazamiento (15) del vehículo deseado por el usuario (a) ,
- detección de la dirección hacia delante o hacia atrás del vehículo seleccionada por un usuario (d) ,
- determinación de las posiciones angulares óptimas para las ruedas directrices (3, 4) del vehículo en función del lado de desplazamiento deseado (15) y de la dirección seleccionada (e) , calculadas por un calculador (22) en función de una situación de uso habitual del vehículo determinada por unos captadores del entorno (20) ,
- desplazamiento automatizado de las ruedas (3, 4) del vehículo a su posición de giro máximo de las ruedas (f) respecto de una posición neutra del lado del desplazamiento del vehículo deseada (15) cuando la marcha delantera del vehículo está seleccionada y del lado opuesto (14) al lado de desplazamiento deseado (15) cuando la marcha trasera está seleccionada,
estando caracterizado dicho procedimiento porque incluye una etapa previa de autorización de las etapas (d) , (e) , (f) si se estima que el vehículo está actualmente posicionado entre dos obstáculos.
2. Procedimiento según la reivindicación 1, en el que la detección del lado desplazamiento deseado (a) es efectuada mediante adquisición de una señal (31) proveniente de un indicador de cambio de posición del vehículo (18) , tal como un intermitente derecho o izquierdo del vehículo.
3. Procedimiento según una de las reivindicaciones anteriores, incluyendo una etapa de verificación de una condición de no parada (g) y una repetición de las etapas (d) , (e) , (f) mientras que la condición de no parada sea verificada.
4. Procedimiento según la reivindicación 3, en el que la condición de no parada es verificada cuando la velocidad de desplazamiento del vehículo es inferior a un valor de velocidad umbral y/o cuando el par de fuerzas aplicado al volante es inferior a un valor de par umbral.
5. Sistema de automatización del giro de las ruedas de un vehículo automóvil durante un desplazamiento de este vehículo para ayudarlo a la salida de una plaza de aparcamiento del tipo en línea hasta un lado de circulación incluyendo:
- un indicador (18) de un lado de desplazamiento deseado por el conductor, tal como un intermitente,
- un captador (19) de la dirección hacia adelante o hacia atrás seleccionada por un usuario,
- unos captadores del entorno (20) ,
- un calculador (22) apto para tomar las informaciones del indicador (18) , del captador de dirección (19) y de los captadores del entorno (20) ,
- un accionador (21) conectado al calculador, y apto para desplazar en pivotamiento las ruedas del vehículo en una posición de giro máximo de las ruedas respecto de una posición neutra del lado de desplazamiento del vehículo deseado (15) cuando la marcha hacia adelante del vehículo está seleccionada y del lado opuesto (14) al lado de desplazamiento deseado (15) cuando la marcha trasera está seleccionada, independientemente de las actuaciones del usuario,
caracterizado porque incluye además un botón de activación accionable manualmente por el usuario, estando autorizada la activación (17) del sistema mediante el botón (17) cuando el vehículo es detectado como estando posicionado longitudinalmente entre dos obstáculos por los captadores del entorno (20) .
6. Sistema según la reivindicación 5, en el que el accionador es del tipo eléctrico.
Patentes similares o relacionadas:
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Sistemas y método de ayuda a la conducción de vehículos, del 19 de Febrero de 2020, de Siemens Mobility S.A.S: Sistema de ayuda a la conduccion de un vehiculo , dicho sistema comprende: un dispositivo de determinacion de trayectoria capaz de determinar una trayectoria para […]
 Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Dispositivo de asistencia para maniobras de atraque en una dársena, del 16 de Octubre de 2019, de NEWTL (Société par Actions Simplifiée): Vehículo de carretera que incluye ruedas delanteras montadas en un eje de dirección delantero y ruedas traseras montadas en un eje trasero […]
Procedimiento y dispositivo para adaptar un ángulo de volante de un volante y un ángulo de dirección de ruedas de una dirección de ruedas en un vehículo tras una maniobra de conducción automatizada efectuada, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para adaptar un ángulo de volante real de un volante y un ángulo de dirección de ruedas real de una dirección de ruedas […]
Sistema de asistencia al conductor, del 11 de Junio de 2019, de ROBERT BOSCH GMBH: Sistema de asistencia al conductor para vehículos a motor, que comprende: - un regulador de guiado longitudinal , el cual está configurado […]
 Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor, sistema de asistencia al conductor así como vehículo de motor, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor , en el que se establece una posición relativa entre el vehículo de motor […]
Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor, sistema de asistencia al conductor así como vehículo de motor, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Procedimiento para realizar maniobras al menos semiautomáticas con un vehículo de motor , en el que se establece una posición relativa entre el vehículo de motor […]