MÉTODO Y SISTEMA DE CONTROL PARA CONTROLAR UNA PLURALIDAD DE ROBOTS.
Método para controlar un sistema de una pluralidad de robots, comprendiendo dicho sistema:
una pluralidad de controladores, que tienen cada uno de ellos un sistema de movimiento asociado que controla robots vinculados y que reciben instrucciones de movimiento desde por lo menos una fuente de instrucciones de movimiento, y una red de ordenadores a través de la cual se comunican dichos controladores; caracterizado porque un programa de control define y ejecuta instrucciones de movimiento coordinadas en el tiempo, estando asociada a una etiqueta exclusiva cada una de estas instrucciones de movimiento coordinadas en el tiempo, de tal manera que se comunica información entre dicha pluralidad de controladores; y en donde el movimiento de robots producido por instrucciones de movimiento coordinadas en el tiempo, con la misma etiqueta, ejecutadas en cualquiera de dicha pluralidad de controladores, se ejecuta de tal manera que comienzan conjuntamente en un primer instante de tiempo, siguen un perfil común de velocidad relativa, y finalizan conjuntamente en un segundo instante de tiempo
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E04007908.
Solicitante: KUKA ROBOTER GMBH.
Nacionalidad solicitante: Alemania.
Dirección: Zugspitzstrasse 140 86165 AUGSBURG ALEMANIA.
Inventor/es: GRAF, STEFAN, CHAFFEE,MICHAEL C, STODDARD,KENNETH A, Kneifel II,R.William, Martin,David M, Mirza,Khalid, Hagenauer,Andreas.
Fecha de Publicación: .
Fecha Solicitud PCT: 1 de Abril de 2004.
Clasificación Internacional de Patentes:
- B25J9/16P4
- B25J9/16T1
Clasificación PCT:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Clasificación antigua:
- B25J9/16 B25J 9/00 […] › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2361404_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un sistema para controlar una pluralidad de robots y a un método para controlar un sistema de una pluralidad de robots, según preámbulos de las reivindicaciones 1 y 16.
Al usar un único controlador para la coordinación de múltiples robots, la “localidad de control coordinado” queda limitada al número de robots controlable por ese controlador. Por ejemplo, un problema de coordinación típico con múltiples robots es la transferencia de una pieza entre robots sin usar dispositivos de sujeción intermedios. Un controlador capaz de controlar solamente cuatro robots permitiría la entrega coordinada de piezas entre los cuatro robots, aunque requeriría una estación de sujeción convencional u otra solución cuando se entregase la pieza a un quinto robot controlado por un controlador independiente. Por otro lado, una pluralidad de robots que presenten cada uno de ellos su propio controlador, con todos los controladores conectados mediante una línea de comunicación, no presenta esta limitación de localidad.
El documento US 6.330.493 B1 muestra un sistema de control aplicado a varios controladores de robots, conectados mediante una línea de comunicación. Esta solución resuelve el problema específico de la limitación de los robots que pueden ser coordinados por un controlador, aunque resuelve este problema únicamente con una precisión marginal, y deja otros problemas de coordinación sin resolver.
Dichos problemas de coordinación de varios robots incluyen:
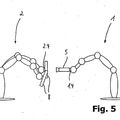
- Compartición de carga – La capacidad de dos o más máquinas robóticas de llevar la misma pieza o carga requiere que los robots mantengan una relación espacial fija mientras llevan la carga. Este problema de coordinación particular se resuelve también en la técnica anterior, aunque se introduce en el presente caso como antecedentes a los otros problemas de coordinación. - Acoplamiento de piezas durante el procesado – Además del requisito de una relación espacial fija entre dos o más robots, uno o más robots adicionales deben realizar un proceso con respecto al conjunto, y uno o más robots pueden entrar en y abandonar el conjunto durante el procesado (compárese con la explicación adicional posteriormente). - Transferencia sin dispositivos de sujeción – Uno o más robots pueden necesitar encontrarse con otro u otros robots mientras todos ellos están en movimiento continuo. - Movimiento manual de operaciones coordinadas – Cuando una línea de producción se detiene debido a un error, con dos o más robots llevando la misma pieza o sujetando múltiples piezas en acoplamiento, puede que sea necesario mover manualmente los múltiples robots en coordinación para evitar que la pieza se rompa o se caiga. - Aprendizaje de operaciones coordinadas – En actividades en las que se mantiene una relación espacial fija, tales como acoplamiento de piezas o compartición de carga, resulta útil cuando a los diversos robots es necesario hacerles aprender únicamente una o unas pocas posiciones de agarre con respecto a las piezas. No se debería hacer aprender a cada robot la trayectoria completa de la pieza, y si la trayectoria de la pieza se cambia, únicamente se debería volver a enseñar a uno de los robots para lograr el cambio de trayectoria. - Movimiento coordinado en el tiempo – Múltiples robots pueden necesitar llevar a cabo procesos idénticos o de simetría especular con una temporización mutua al unísono. No existe relación espacial entre los robots, pero puede ser necesaria una alineación en el tiempo de sus movimientos.El más complejo de los problemas anteriores es el acoplamiento simultáneo de piezas mientras se está realizando el procesado. Un ejemplo es el proceso de unir dos piezas pequeñas a una pieza grande mediante soldadura por arco usando tres robots sin dispositivos de sujeción fijos: el Robot 1 lleva la pieza grande. El Robot 2 lleva las dos piezas pequeñas, una cada vez, y el Robot 3 lleva el soplete de soldadura por arco y realiza el proceso de soldadura. Un proceso de este tipo requiere normalmente que la pieza grande se mueva simultáneamente y coordinada en el tiempo con el robot soldador, de manera que el robot soldador pueda llegar hasta la pieza completa y las costuras fundidas mantengan una orientación casi horizontal. A su vez, esto requiere una coordinación espacial de los movimientos de los Robots 1, 2 y 3. El Robot 2 debe mantener una posición fija con respecto al Robot 1, de manera que la pieza pequeña permanezca acoplada correctamente a la pieza grande, y el Robot 3 debe llevar a cabo su proceso de soldadura con respecto a las piezas en movimiento sujetadas por los Robots 1 y 2.
A medida que la soldadura avanza, es posible que el Robot 2 libere su agarre de la pieza pequeña, debido a que la pieza haya sido fijada en posición. El Robot 2 puede abandonar el conjunto mientras el movimiento del conjunto está en marcha y puede ir a buscar a la segunda pieza pequeña. El Robot 2 vuelve con la segunda pieza pequeña para encontrarse con el conjunto. El Robot 3 suelda la segunda pieza pequeña a la pieza grande, nuevamente mientras la totalidad de los tres robots se mueve con coordinación espacial.
**(Ver fórmula)**
Las características interesantes de dicho proceso, además de las relaciones espaciales variables de los tres robots, son las siguientes:
I. El Robot 2 puede tanto abandonar como unirse al conjunto mientras este último puede estar en movimiento y cambia de un movimiento coordinado espacialmente a un movimiento independiente, o viceversa, mientras el conjunto puede estar en movimiento.
II. Típicamente, una porción de las costuras soldadas está definida con respecto a las piezas pequeñas. Para dichas porciones, el robot de soldadura por arco se está moviendo con respecto a las piezas pequeñas, que al mismo tiempo deben mantener una posición fija con respecto a la pieza grande. A esto se le hace referencia como “cadena de dependencias espaciales”.
En el documento US 6.330.493 B1 antes mencionado, se define una “operación cooperativa síncrona”. Esta operación se produce entre un robot maestro y uno o más robots esclavos. La definición de qué robot es maestro y cuáles son esclavos se guarda en “patrones de vinculación” basados en software. Los patrones de vinculación cambian únicamente entre conjuntos de programas. De este modo, para cambiar un robot determinado del funcionamiento coordinado con otro robot al funcionamiento independiente es necesario poner en marcha un programa nuevo en una secuencia, y no se prevé el movimiento continuo entre programas. De este modo, no es posible hacer que un robot cambie de funcionamiento de esclavo a independiente y que vuelva nuevamente a esclavo todo ello mientras el robot maestro permanece en movimiento, según se requiere en el punto 1 anterior. De forma más general, el encuentro y la separación de un robot con otro en movimiento no es posible con una única “operación cooperativa síncrona” según se define en el documento US 6.330.493 ó ni siquiera con múltiples operaciones de este tipo.
La transferencia de piezas, sin dispositivos de sujeción, requiere también una capacidad de encuentro y un cambio del funcionamiento coordinado al independiente según se ha descrito anteriormente. La técnica anterior tampoco es adecuada para dicha actividad de coordinación, excepto cuando todos los robots son controlados por un único controlador, lo cual a su vez limita la localidad de control coordinado.
Tal como se ha indicado anteriormente, en la técnica relacionada la designación de robots maestros y esclavos se guarda en patrones de vinculación, que únicamente pueden ser cambiados cambiando de programa. De este modo, no es posible que un robot sea tanto maestro como esclavo en el mismo programa, y no es posible que un robot sea tanto maestro como esclavo simultáneamente. De este modo, no hay ninguna manera de implementar la “cadena de dependencias espaciales” requerida por el anterior punto 2 usando la técnica relacionada.
Un ejemplo de las actividades de coordinación enumeradas anteriormente es la compartición de carga. Una vez que comienza la actividad coordinada, no existe movimiento relativo entre las garras de los diversos robots que llevan la pieza, de modo que cualquier método que pueda proporcionar una relación espacial fija durante el movimiento programado puede llevar a cabo satisfactoriamente esta actividad con cierto nivel de precisión. No obstante, si una operación de producción se detiene en mitad de dicha actividad,... [Seguir leyendo]
Reivindicaciones:
1. Método para controlar un sistema de una pluralidad de robots, comprendiendo dicho sistema:
una pluralidad de controladores, que tienen cada uno de ellos un sistema de movimiento asociado que controla robots vinculados y que reciben instrucciones de movimiento desde por lo menos una fuente de instrucciones de movimiento, y una red de ordenadores a través de la cual se comunican dichos controladores; caracterizado porque un programa de control define y ejecuta instrucciones de movimiento coordinadas en el tiempo, estando asociada a una etiqueta exclusiva cada una de estas instrucciones de movimiento coordinadas en el tiempo, de tal manera que se comunica información entre dicha pluralidad de controladores; y en donde el movimiento de robots producido por instrucciones de movimiento coordinadas en el tiempo, con la misma etiqueta, ejecutadas en cualquiera de dicha pluralidad de controladores, se ejecuta de tal manera que comienzan conjuntamente en un primer instante de tiempo, siguen un perfil común de velocidad relativa, y finalizan conjuntamente en un segundo instante de tiempo.
2. Método según la reivindicación 1, en el que un reloj asociado en cada controlador produce información de temporización basándose en un sistema de referencia temporal; en donde un sistema destinado a suministrar una señal de sincronización a dichos controladores alinea periódicamente los sistemas de referencia temporales de dichos relojes; y en donde dichos controladores usan dichos relojes para controlar dichos sistemas de movimiento asociados de tal manera que dichos robots vinculados controlados por dichos sistemas de movimiento funcionan con alineación de los relojes.
3. Método según la reivindicación 2, en el que una señal con una primera frecuencia y fase se usa para ajustar una fase de uno de dichos relojes que funcionan a una segunda frecuencia superior en cada uno de la pluralidad de controladores para conseguir que las fases de dichos relojes de frecuencia superior sean iguales en la totalidad de dicha pluralidad de controladores; y en donde dicha señal de primera frecuencia es proporcional al desfase.
4. Método para controlar un sistema de una pluralidad de robots, comprendiendo además dicho sistema:
una pluralidad de controladores, presentando cada uno de ellos un sistema de movimiento asociado, adaptado para controlar robots vinculados; presentando por lo menos uno de dichos controladores por lo menos una fuente de instrucciones de movimiento; y una red de ordenadores a través de la cual se comunican dichos controladores; en donde por lo menos un primer controlador de dicha pluralidad de controladores envía una posición ordenada de su robot vinculado, a través de dicha red; en donde por lo menos un segundo controlador de dicha pluralidad de controladores recibe dicha posición ordenada, a través de dicha red, desde dicho primer controlador; en donde dicho segundo controlador define por lo menos un sistema de referencia independiente, que es un primer sistema de referencia de robot con una posición fija con respecto a algún punto en dicho robot vinculado de dicho primer controlador, y por lo menos un sistema de referencia dependiente, que es un segundo sistema de referencia de robot con una posición fija con respecto a algún punto en dicho robot vinculado de dicho segundo controlador; en donde dicho segundo controlador, usando dicha posición ordenada, mantiene el sistema de referencia independiente, que es una relación de transformación espacial entre dicho sistema de referencia dependiente y dicho sistema de referencia independiente moviendo su robot vinculado para mantener dicha relación de transformación; y en donde dicha relación de dependencia está definida por una fuente de instrucciones de movimiento de dicho segundo controlador; caracterizado porque dicho sistema de referencia dependiente definido con respecto a un robot vinculado a un primer controlador se define como un sistema de referencia independiente con respecto a dicho robot por un controlador diferente.
5. Método según la reivindicación 4, en el que dicha relación de transformación espacial es una relación de transformación Cartesiana.
6. Método según la reivindicación 4 ó 5, en el que un sistema de aprendizaje de dicho segundo controlador, que usa dicha posición ordenada, graba una posición aprendida definida con respecto a dicho sistema de referencia independiente para su uso posterior, de tal manera que, al producirse el uso posterior, dicho segundo controlador provoca que dicho segundo sistema de
referencia de robot siga una trayectoria preestablecida por una fuente de instrucciones de movimiento de dicho segundo controlador hacia dicha posición aprendida.
7. Método según una de las reivindicaciones 4 a 6, en el que dicha dependencia se crea por medio de un movimiento de dicho segundo sistema de referencia de robot a una posición definida con respecto a dicho sistema de referencia independiente desde una posición definida con respecto a un sistema de referencia diferente de dicho sistema de referencia independiente.
8. Método según una de las reivindicaciones 4 a 7, en el que dicho segundo controlador mantiene dicha relación de dependencia de transformación entre dicho sistema de referencia dependiente y dicho sistema de referencia independiente mientras no hay ninguna orden de ninguna de dichas fuentes de instrucciones de movimiento de dicho segundo controlador y/o cuando dicho segundo controlador está cambiando de una de dichas fuentes de instrucciones de movimiento a otra.
9. Método según una de las reivindicaciones 4 a 8, en el que la relación de transformación espacial, es decir, la relación de dependencia, del por lo menos segundo controlador es un movimiento de un segundo sistema de referencia de robot definido con respecto a un sistema de referencia independiente, siendo emitida dicha instrucción de movimiento relativo por una fuente de instrucciones de movimiento de dicho por lo menos segundo controlador.
10. Método según una de las reivindicaciones 4 a 9, en el que la relación de transformación espacial, es decir, la relación de dependencia, del por lo menos un segundo controlador es un movimiento de un segundo sistema de referencia de robot, definido con respecto a un sistema de referencia independiente, siendo emitida dicha instrucción de movimiento relativo por una fuente de instrucciones de movimiento de dicho por lo menos un segundo controlador.
11. Método según la reivindicación 4, en el que además un reloj asociado en cada controlador produce información de temporización basándose en un sistema de referencia temporal; en donde un sistema destinado a suministrar una señal de sincronización a dichos controladores alinea periódicamente los sistemas de referencia temporales de dichos relojes; y en donde dichos controladores usan dichos relojes para controlar dichos sistemas de movimiento asociados de tal manera que dichos robots vinculados controlados por dichos sistemas de movimiento funcionan con alineación de los relojes.
12. Método según la reivindicación 11, en el que un sistema de aprendizaje de dicho segundo controlador, que usa dicha posición ordenada, graba una posición aprendida definida con respecto a dicho sistema de referencia independiente para su uso posterior, de tal manera que, al producirse el uso posterior, dicho segundo controlador provoca que dicho segundo sistema de referencia de robot siga una trayectoria preestablecida por una fuente de instrucciones de movimiento de dicho segundo controlador hacia dicha posición aprendida.
13. Método según la reivindicación 11 ó 12, en el que dicha dependencia se crea por medio de un movimiento de dicho segundo sistema de referencia de robot a una posición definida con respecto a dicho sistema de referencia independiente desde una posición definida con respecto a un sistema de referencia diferente de dicho sistema de referencia independiente.
14. Método según una de las reivindicaciones 11 a 13, en el que dicho segundo controlador mantiene dicha relación de dependencia de transformación fija entre dicho sistema de referencia dependiente y dicho sistema de referencia independiente mientras no hay ninguna orden de ninguna de dichas fuentes de instrucciones de movimiento de dicho segundo controlador y/o cuando dicho segundo controlador está cambiando de una de dichas fuentes de instrucciones de movimiento a otra.
15. Método según una de las reivindicaciones 11 a 14, en el que dicho sistema de referencia dependiente definido con respecto a un robot vinculado a un primer controlador se define como un sistema de referencia independiente con respecto a dicho robot por parte de un controlador diferente.
16. Sistema para controlar una pluralidad de robots, comprendiendo dicho sistema:
**(Ver fórmula)**
una pluralidad de controladores de movimiento, presentando cada uno de ellos un sistema de movimiento asociado que controla un robot vinculado, pudiendo recibir, cada uno de dichos controladores de movimiento, instrucciones de movimiento de por lo menos una fuente de instrucciones de movimiento, y siendo, por lo menos una de dichas fuentes de instrucciones de movimiento, un programa de control; y una red de ordenadores a través de la cual se comunican dichos controladores; caracterizado porque dicho programa de control está dispuesto para definir y ejecutar una instrucción de movimiento coordinado en el tiempo, con una etiqueta exclusiva, para comunicar información entre dicha pluralidad de controladores; y en donde dichos controladores están dispuestos para la ejecución sincronizada de instrucciones de movimiento coordinadas en el tiempo, con la misma etiqueta, de tal manera que dichas instrucciones se ejecutan de tal modo que comienzan conjuntamente en un primer instante de tiempo, siguen un perfil común de velocidad relativa, y finalizan conjuntamente en un segundo instante de tiempo.
**(Ver fórmula)**
17. Sistema según la reivindicación 16, en el que dicha fuente de instrucciones de movimiento es local con respecto a dicho controlador.
18. Sistema según la reivindicación 16 ó 17, en el que dicha fuente de instrucciones de movimiento es remota con respecto a dicho controlador.
19. Sistema según una de las reivindicaciones 16 a 18, que comprende además:
un reloj asociado para cada controlador, que produce información de temporización basada en un sistema de referencia temporal; y un sistema para suministrar una señal de sincronización a dichos controladores que alinea periódicamente los sistemas de referencia temporales de dichos relojes; estando dispuestos dichos controladores para usar dichos relojes con el fin de controlar dichos sistemas de movimiento asociados de tal manera que dichos robots vinculados controlados por dichos sistemas de movimiento funcionan con alineación de relojes.
20. Sistema según la reivindicación 19, en el que dichos relojes están conectados de forma permanente a dichos controladores.
21. Sistema según la reivindicación 19 ó 20, en el que dichos relojes están conectados a dichos controladores a través de medios de enganche de fase, comprendiendo dichos medios de enganche de fase una conexión de sincronización en serie y/o una conexión de Ethernet.
22. Sistema para controlar una pluralidad de robots, comprendiendo dicho sistema:
una pluralidad de controladores, que presentan cada uno de ellos un sistema de movimiento asociado que controla robots vinculados; presentando por lo menos uno de dichos controladores por lo menos una fuente de instrucciones de movimiento; una red de ordenadores a través de la cual se comunican dichos controladores; presentando por lo menos un primer controlador de dicha pluralidad de controladores un sistema emisor de posiciones para enviar una posición ordenada de dichos robots vinculados, a través de dicha red; presentando, por lo menos un segundo controlador de dicha pluralidad de controladores, un sistema receptor de posiciones para recibir dicha posición ordenada, a través de dicha red, desde por lo menos uno de dichos primeros controladores; estando dispuesto dicho segundo controlador para definir por lo menos un sistema de referencia independiente, que es un primer sistema de referencia de robot con una posición fija con respecto a algún punto en dicho robot vinculado a dicho primer controlador, y por lo menos un sistema de referencia dependiente, que es un segundo sistema de referencia de robot con una posición fija con respecto a algún punto en dichos robots vinculados a dicho segundo controlador; estando dispuesto dicho segundo controlador para mantener una relación de dependencia, que es una cierta relación de transformación espacial entre dicho sistema de referencia dependiente y dicho sistema de referencia independiente; caracterizado porque dicho sistema de referencia dependiente definido con respecto a un robot vinculado a un primer controlador está definido como un sistema de referencia independiente con respecto a dicho robot por un controlador diferente; siendo especificada dicha relación por dicha fuente de instrucciones de movimiento de dicho segundo controlador.
23. Sistema según la reivindicación 22, en el que dicha relación espacial es una relación de transformación Cartesiana.
24. Sistema según la reivindicación 22 ó 23,
en el que un sistema de aprendizaje de dicho segundo controlador está dispuesto para grabar posiciones aprendidas definidas con respecto a un sistema de referencia independiente para su uso posterior.
25. Sistema según una de las reivindicaciones 22 a 24, en el que dicha fuente de instrucciones de movimiento de dicho segundo controlador está dispuesta para crear dicha relación de dependencia entre un segundo sistema de referencia de robot y dicho sistema de referencia independiente.
26. Sistema según una de las reivindicaciones 22 a 25, en el que dicha fuente de instrucciones de movimiento de dicho segundo controlador está dispuesta para emitir una instrucción de movimiento relativo de tal manera que dicha relación de dependencia de dicho segundo controlador es un movimiento de dicho sistema de referencia dependiente definido con respecto a dicho sistema de referencia independiente.
27. Sistema según una de las reivindicaciones 22 a 26, en el que dicho segundo controlador está dispuesto para mantener dicha relación de dependencia de transformación entre dicho sistema de referencia dependiente y dicho sistema de referencia independiente mientras no hay ninguna orden de ninguna de dichas fuentes de instrucciones de movimiento de dicho segundo controlador y/o cuando dicho segundo controlador cambia de una de dichas fuentes de instrucciones a otra.
28. Sistema según la reivindicación 22, comprendiendo además dicho sistema:
un reloj asociado para cada controlador, que produce información de temporización basada en un sistema de referencia temporal; y un sistema para suministrar una señal de sincronización a dichos controladores que alinea periódicamente los sistemas de referencia temporales de dichos relojes; estando dispuestos dichos controladores para usar dichos relojes con el fin de controlar dichos sistemas de movimiento asociados de tal manera que dichos robots vinculados controlados por dichos sistemas de movimiento funcionan con alineación de relojes.
29. Sistema según la reivindicación 28, en el que un sistema de aprendizaje de dicho segundo controlador está dispuesto para grabar posiciones aprendidas definidas con respecto a un sistema de referencia independiente para su uso posterior.
30. Sistema según la reivindicación 28 ó 29, en el que dicha fuente de instrucciones de movimiento de dicho segundo controlador está dispuesta para crear dicha relación de dependencia entre un segundo sistema de referencia de robot y dicho sistema de referencia independiente.
31. Sistema según una de las reivindicaciones 28 a 30, en el que dicha fuente de instrucciones de movimiento de dicho segundo controlador está dispuesta para emitir una instrucción de movimiento relativo de tal manera que dicha relación de dependencia de dicho segundo controlador es un movimiento de dicho sistema de referencia dependiente definido con respecto a dicho sistema de referencia independiente.
32. Sistema según una de las reivindicaciones 28 a 31, en el que dicho segundo controlador está dispuesto para mantener dicha relación de dependencia de transformación entre dicho sistema de referencia dependiente y dicho sistema de referencia independiente mientras no hay ninguna orden de ninguna de dichas fuentes de instrucciones de movimiento de dicho segundo controlador y/o cuando dicho segundo controlador cambia de una de dichas fuentes de instrucciones a otra.
Patentes similares o relacionadas:
 PROCEDIMIENTO DE INTERCAMBIO DE DATOS ENTRE SISTEMAS DE MANDO DE MAQUINAS, Y EN PARTICULAR DE ROBOTS, del 4 de Mayo de 2010, de KUKA ROBOTER GMBH: Procedimiento de intercambio de datos entre sistemas de mando de máquinas, y en particular de robots, donde un primer sistema de mando genera una instrucción a transmitir […]
PROCEDIMIENTO DE INTERCAMBIO DE DATOS ENTRE SISTEMAS DE MANDO DE MAQUINAS, Y EN PARTICULAR DE ROBOTS, del 4 de Mayo de 2010, de KUKA ROBOTER GMBH: Procedimiento de intercambio de datos entre sistemas de mando de máquinas, y en particular de robots, donde un primer sistema de mando genera una instrucción a transmitir […]
PROCEDIMIENTO Y DISPOSITIVO PARA CONTROLAR UNA PLURALIDAD DE MANIPULADORES, del 8 de Septiembre de 2011, de KUKA ROBOTER GMBH: Procedimiento para controlar una pluralidad de manipuladores, con cierto número de unidades de mando que están asignadas a los manipuladores de […]
 PROCEDIMIENTO Y DISPOSITIVO PARA EL CONTROL DE MANIPULADORES, del 30 de Noviembre de 2010, de KUKA ROBOTER GMBH: Procedimiento para el control de una pluralidad de manipuladores tales como robots industriales multiaxiales, donde: a) un manipulador […]
PROCEDIMIENTO Y DISPOSITIVO PARA EL CONTROL DE MANIPULADORES, del 30 de Noviembre de 2010, de KUKA ROBOTER GMBH: Procedimiento para el control de una pluralidad de manipuladores tales como robots industriales multiaxiales, donde: a) un manipulador […]
 PROCEDIMIENTO Y DISPOSITIVO PARA MANEJAR PIEZAS, del 29 de Julio de 2010, de ABB RESEARCH LTD.: Un método para operar un sistema incluyendo al menos dos robots (R1, R2) para manejar piezas y una unidad de control de robot dispuesta para el control […]
PROCEDIMIENTO Y DISPOSITIVO PARA MANEJAR PIEZAS, del 29 de Julio de 2010, de ABB RESEARCH LTD.: Un método para operar un sistema incluyendo al menos dos robots (R1, R2) para manejar piezas y una unidad de control de robot dispuesta para el control […]
 ESTACION DE TRABAJO CON SOPORTE DE PIEZAS DE VARIAS CARAS Y METODO DE PILOTAJE DE UNA ESTACION DE ESTE TIPO, del 11 de Junio de 2010, de ABB FRANCE: Estación de trabajo robotizada que comporta al menos un robot multieje manipulador de piezas teniendo un brazo con una extremidad libre provista […]
ESTACION DE TRABAJO CON SOPORTE DE PIEZAS DE VARIAS CARAS Y METODO DE PILOTAJE DE UNA ESTACION DE ESTE TIPO, del 11 de Junio de 2010, de ABB FRANCE: Estación de trabajo robotizada que comporta al menos un robot multieje manipulador de piezas teniendo un brazo con una extremidad libre provista […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]