PROCEDIMIENTO Y DISPOSITIVO PARA LA TOMA Y TRANSPOSICIÓN DE HACES.
Dispositivo para la toma de haces con una base de soporte (3a,
3b) para los haces y con un lado anterior (5) al menos parcialmente abierto para la recogida de los haces, con un empujador (6) que está unido de forma tal que es móvil para así desplazar los haces en una dirección de toma horizontal a través del lado anterior abierto (5) para dejarlos depositados sobre una base de soporte; caracterizado por el hecho de que encima de la base de soporte están previstos para el posicionamiento de los haces sobre la base de soporte sendos elementos de posicionamiento (15a, 15b) que son desplazables y se extienden a lo largo de ambos límites laterales de la base de soporte, de que la base de soporte presenta al menos dos partes (3a, 3b) de la base de soporte que son desplazables relativamente entre sí en o contra la dirección de toma de los haces, y de que el dispositivo presenta un acoplamiento de conexión (18) para la conexión con un robot (19)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07019506.
Solicitante: KUKA ROBOTER GMBH.
Nacionalidad solicitante: Alemania.
Dirección: ZUGSPITZSTRASSE 140 86165 AUGSBURG ALEMANIA.
Inventor/es: HAGENBROCK,WERNER.
Fecha de Publicación: .
Fecha Solicitud PCT: 5 de Octubre de 2007.
Clasificación Internacional de Patentes:
- B65G47/90 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
- B65G57/24 B65G […] › B65G 57/00 Apilado de objetos (B65G 60/00 tiene prioridad; alimentación, apilado de hojas B65H). › siendo las capas transferidas como un conjunto, p. ej. sobre pallets.
- B65G61/00 B65G […] › Utilización de aparatos de toma o de transferencia, o de manipuladores, para apilar o desapilar objetos no previstos en otro lugar.
Clasificación PCT:
- B65G47/90 B65G 47/00 […] › Dispositivos para coger o dejar los artículos o los materiales.
- B65G57/24 B65G 57/00 […] › siendo las capas transferidas como un conjunto, p. ej. sobre pallets.
- B65G61/00 B65G […] › Utilización de aparatos de toma o de transferencia, o de manipuladores, para apilar o desapilar objetos no previstos en otro lugar.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2358841_T3.pdf
Fragmento de la descripción:
La invención se refiere a un dispositivo para la toma de haces con una base de soporte para los haces y con un lado anterior al menos parcialmente abierto para la recogida de los haces según el preámbulo de la reivindicación 1. La invención se refiere además a una instalación para la transposición de haces con al menos un robot según el preámbulo de la reivindicación 13. La invención se refiere además a un procedimiento para la transposición de haces según el preámbulo de la reivindicación 15.
Un dispositivo genérico y un procedimiento genérico se usan por ejemplo en instalaciones de producción industriales, siendo los productos o artículos fabricados reunidos en haces para así quedar en forma de grandes unidades de embalaje o haces, para ser luego depositados en otro sitio sobre un palet como tongadas de artículos apiladas unas sobre otras en forma de mayores unidades de transporte o de almacenamiento. En particular en el caso de la llamada paletización mixta se reúnen sobre un único palet distintos artículos o haces de artículos, por ejemplo debido a un pedido hecho por un minorista a un mayorista. Para ello se toman de palets con una clase de artículos los artículos deseados y se forma sobre un palet de suministro el agrupamiento individual de artículos que se ajusta al pedido del cliente. Otra importante aplicación es también la descarga de haces o tongadas de artículos, por ejemplo de palets de vidrio nuevo, de palets de latas o de palets con artículos de plástico (botellas de PET) (PET = tereftalato de polietileno), para entonces aportar los productos de manera individualizada a una máquina envasadora. Además existe no tan sólo la necesidad de sacar tongadas individuales de artículos de palets apilados, sino también la necesidad de tomar aquellos haces que son puestos en disponibilidad por sistemas periféricos de otra clase, tales como por ejemplo instalaciones de transporte.
Para la toma de haces apilados sobre palets son conocidos robots con un dispositivo de toma dispuesto en el brazo del robot para los haces, a cuyo dispositivo de toma también se le denomina útil despaletizador o útil cogedor. Tales útiles están habitualmente equipados de forma tal que la toma del haz se efectúa en dirección vertical, después de haber sido el dispositivo de toma puesto en posición encima del palet y tras haber bajado con dicho dispositivo de toma al correspondiente haz apilado sobre el palet. De esta manera puede efectuarse un sucesivo desapilamiento o apilamiento de haces sobre palets.
La en tales condiciones necesaria introducción de los haces por debajo en el dispositivo de toma es sin embargo a menudo desventajosa, en particular en el caso de una puesta en disponibilidad de los haces por medio de estructuras periféricas independientes, como por ejemplo instalaciones de transporte,
o bien también en caso de haber una pluralidad de palets dispuestos en fila unos directamente junto a otros para economizar espacio. Frente a ello es preferible o incluso necesario introducir a tiempo el respectivo haz en el dispositivo de toma. Con esta finalidad es conocida la técnica de usar estructuras externas que están separadas del dispositivo de toma del robot y desplazan los haces lateralmente llevándolos al dispositivo de toma. Esta solución adolece sin embargo de la desventaja de que requiere ocupar más espacio y es además utilizable de manera poco flexible, puesto que un dispositivo de este tipo debe preverse delante de la carga/descarga de los haces en la ubicación fija de los respectivos haces.
La GB-A-2066201 presenta un dispositivo para la toma de haces y un procedimiento para la transposición de haces según el preámbulo de las reivindicaciones 1 y 15. La FR-A-2878238 da a conocer una instalación para la transposición de haces con al menos un robot según el preámbulo de la reivindicación 13.
La invención persigue por consiguiente la finalidad de, obviando las desventajas anteriormente mencionadas, permitir una introducción lateral de haces en un dispositivo de toma que pueda usarse de manera flexible con respecto a la situación, a la configuración y al entorno de los haces.
Según la invención, la finalidad anteriormente mencionada es alcanzada con un dispositivo según la reivindicación 1.
Así pues, mediante la disposición de un empujador en el dispositivo de toma según la invención se hace posible una introducción lateral incluso de haces posicionados desfavorablemente. El dispositivo es además susceptible de ser usado incluso en caso de variar la situación y la disposición de los distintos haces.
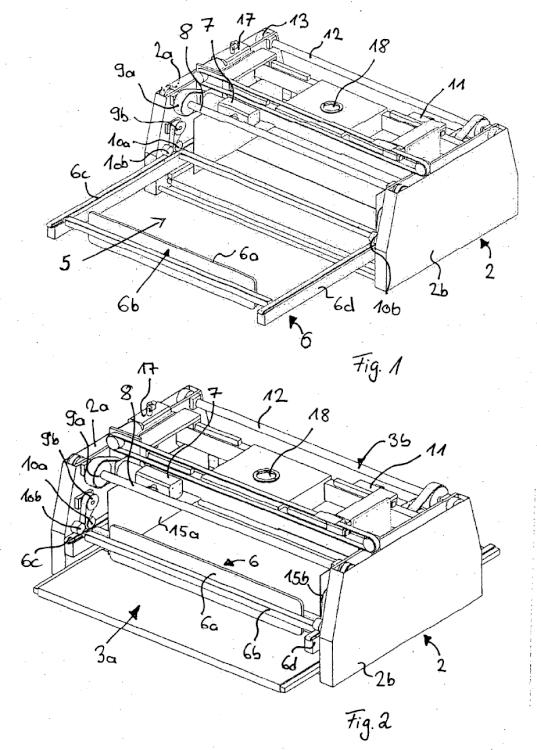
Concretamente en cuanto a la forma de realización está previsto que el empujador sea desplazable entre una posición exterior delante del lado anterior abierto y una posición interior detrás del lado anterior abierto.
Para el preciso posicionamiento del empujador se propone que el empujador vaya guiado en carriles. El posicionamiento del empujador se hace además preferiblemente de manera automática, estando previsto que el empujador sea desplazable por medio de al menos un dispositivo de accionamiento, y preferiblemente por medio de correas dentadas.
Puede lograrse una sencilla manipulación de los haces gracias al hecho de que el empujador está configurado para abrazar los haces en todo su contorno. Una configuración concreta prevé que el empujador esté formado por tres brazos dispuestos en esencia en U. Dos brazos laterales que discurren paralelamente pueden extenderse a lo largo del dispositivo de toma de los haces, y un brazo transversal que une a ambos brazos laterales puede quedar situado enfrente del lado anterior abierto. En una realización preferida los brazos laterales están además configurados con forma de carriles y son móviles a lo largo de sendas guías de carril dispuestas encima de la base de soporte. Para lograr una uniforme repartición de la fuerza aplicada a los haces se propone que el brazo transversal esté configurado con forma de placa. Gracias a ello se logra un uniforme desplazamiento al haber sido introducidos los haces y se impide que puedan resultar dañados los haces.
Según el dispositivo de toma según la invención está previsto que encima de la base de soporte estén previstos sendos elementos de posicionamiento que se extienden a lo largo de ambos límites laterales de la base de soporte para el posicionamiento de los haces sobre la base de soporte. Además de tal posicionamiento de los haces sobre la base de soporte en dirección lateral pueden estar también previsto un posicionamiento en dirección longitudinal. Esto se logra gracias al hecho de que encima de la base de soporte está previsto para el posicionamiento de los haces sobre la base de soporte un elemento de posicionamiento que se extiende a lo largo del lado posterior de la base de soporte. La posición de toma de los haces puede modificarse y adaptarse a los haces de distinta configuración gracias al hecho de que el respectivo elemento de posicionamiento es desplazable sobre la base de soporte perpendicularmente a la dirección de su extensión. También a este respecto puede lograrse una uniforme transmisión de la fuerza gracias al hecho de que los elementos de posicionamiento están configurados en esencia con forma de placa.
Según el dispositivo de toma está previsto que la base de soporte presente al menos dos partes de la base de soporte desplazables relativamente una con respecto a la otra. Gracias a ello se logra que los haces puedan ser tomados y entregados también en dirección vertical. Concretamente en cuanto a la forma de realización está previsto que las partes de la base de soporte sean desplazables en la dirección
o contra la dirección de toma horizontal de los haces.
Para la conexión con un robot está previsto que el dispositivo de toma presente un acoplamiento de conexión.
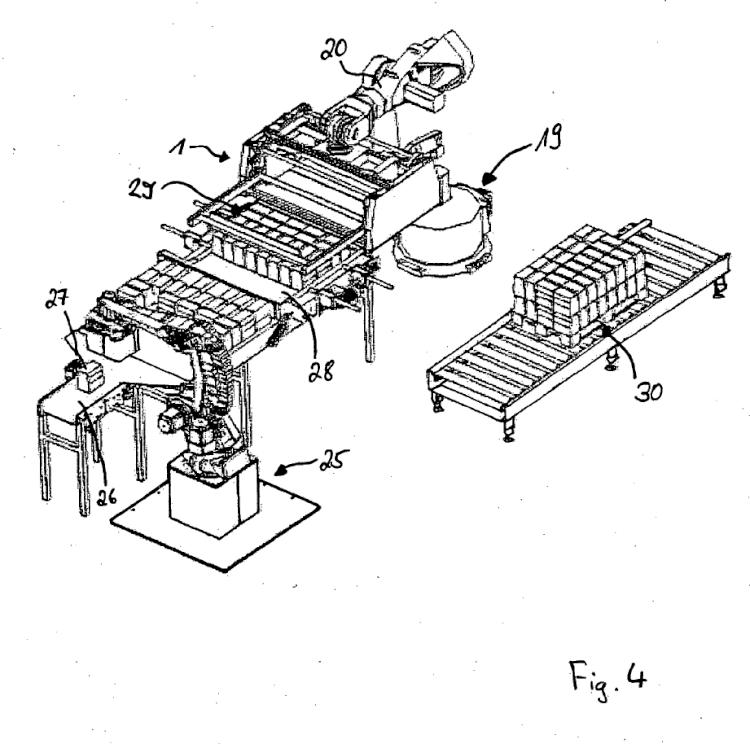
Para alcanzar la finalidad anteriormente mencionada con una instalación de la clase mencionada al comienzo se propone que al menos uno de los robots presente un dispositivo según la invención para la toma de haces tal como el que ha sido descrito anteriormente. Según un perfeccionamiento preferido están previstos al menos un robot para la reunión de artículos en forma de haces y al menos un robot para la toma de los haces con un dispositivo de toma según la invención.
La finalidad anteriormente mencionada es además alcanzada mediante un procedimiento según la reivindicación 15. Según un perfeccionamiento preferido se propone que los haces sean hechos por al menos un robot a... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo para la toma de haces con una base de soporte (3a, 3b) para los haces y con un lado anterior (5) al menos parcialmente abierto para la recogida de los haces, con un empujador
(6) que está unido de forma tal que es móvil para así desplazar los haces en una dirección de toma horizontal a través del lado anterior abierto (5) para dejarlos depositados sobre una base de soporte; caracterizado por el hecho de que encima de la base de soporte están previstos para el posicionamiento de los haces sobre la base de soporte sendos elementos de posicionamiento (15a, 15b) que son desplazables y se extienden a lo largo de ambos límites laterales de la base de soporte, de que la base de soporte presenta al menos dos partes (3a, 3b) de la base de soporte que son desplazables relativamente entre sí en o contra la dirección de toma de los haces, y de que el dispositivo presenta un acoplamiento de conexión (18) para la conexión con un robot (19).
2. Dispositivo según la reivindicación 1, caracterizado por el hecho de que el empujador (6) está configurado para abrazar los haces rodeándolos en su periferia.
3. Dispositivo según la reivindicación 1 o 2, caracterizado por el hecho de que el empujador (6) es desplazable entre una posición exterior delante del lado anterior abierto (5) y una posición interior detrás del lado anterior abierto (5).
4. Dispositivo según una de las reivindicaciones 1 a 3, caracterizado por el hecho de que el empujador (6) va guiado en carriles.
5. Dispositivo según una de las reivindicaciones 1 a 4, caracterizado por el hecho de que el empujador (6) es desplazable por medio de al menos de un dispositivo de accionamiento (7) y preferiblemente a través de correas dentadas (9a, 9b).
6. Dispositivo según una de las reivindicaciones 1 a 5, caracterizado por el hecho de que el empujador está formado por tres brazos (6b, 6c, 6d) dispuestos en esencia en U.
7. Dispositivo según la reivindicación 6, caracterizado por el hecho de que dos brazos laterales (6c, 6d) que discurren paralelamente se extienden a lo largo del dispositivo de toma de los haces y un brazo transversal (6b) que une a ambos brazos laterales queda situado enfrente del lado anterior abierto.
8. Dispositivo según la reivindicación 7, caracterizado por el hecho de que los brazos laterales (6c, 6d) están configurados con forma de carriles y son móviles a lo largo de sendas guías de carril dispuestas encima de la base de soporte.
9. Dispositivo según la reivindicación 7 u 8, caracterizado por el hecho de que el brazo transversal (6a, 6b) está configurado con forma de placa.
10. Dispositivo según una de las reivindicaciones 1 a 9, caracterizado por el hecho de que encima de la base de soporte (3a, 3b) está previsto para el posicionamiento de los haces sobre la base de soporte (3a, 3b) un elemento de posicionamiento (16) que se extiende a lo largo del lado posterior de la base de soporte (3a, 3b).
11. Dispositivo según la reivindicación 9 o 10, caracterizado por el hecho de que el respectivo elemento de posicionamiento (15a, 15b, 16) es desplazable sobre la base de soporte (3a, 3b) perpendicularmente a la dirección de su extensión.
12. Dispositivo según una de las reivindicaciones 9 a 11, caracterizado por el hecho de que los elementos de posicionamiento (15a, 15b, 16) están configurados en esencia con forma de placa.
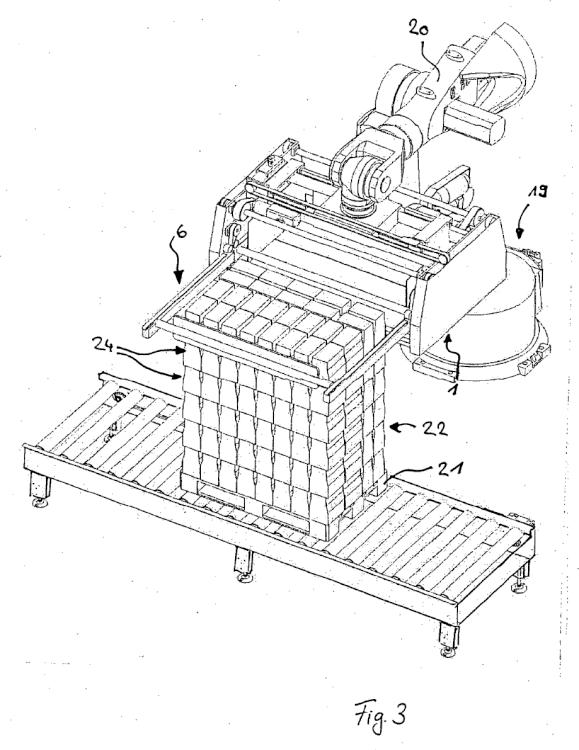
13. Instalación para la transposición de haces con al menos un robot, caracterizada por el hecho de que al menos uno (19) de los robots presenta un dispositivo (1) para la toma de haces según una de las reivindicaciones 1 a 12.
14. Instalación según la reivindicación 13, caracterizada por al menos un robot (25) para la formación de haces por medio del agrupamiento de artículos y al menos un robot (19) para la toma de los haces (29) con un dispositivo de toma (1) según una de las reivindicaciones 1 a 16.
15. Procedimiento para la transposición de haces, en donde los haces son introducidos en el dispositivo mediante un empujador (6) que está unido a un dispositivo para la toma de los haces de forma tal que dicho empujador es móvil en dicho dispositivo; caracterizado por el hecho de que un robot (19) posiciona al dispositivo en primer lugar encima de una pila (22) de haces con la posición exterior del empujador (6) que es la prevista para la toma de haces, y a continuación baja al dispositivo hasta posicionar al empujador en la tongada (24) que constituye el haz más superior de la pila, la tongada que constituye el haz es introducida por empuje por el empujador en el dispositivo, y el robot gira un brazo de robot (20) que lleva el dispositivo llevándolo a un sitio de entrega y ahí se produce en dirección vertical y por medio del mutuo desplazamiento 5 relativo de ambas partes (3a, 3b) de la base de soporte del dispositivo una entrega de los haces en una posición en la que queda formada una abertura hacia abajo para la entrega vertical de los haces. 16. Procedimiento según la reivindicación 15, caracterizado por el hecho de que los haces son formados por al menos un robot a base de agrupar artículos individuales o grupos artículos y/o son extraídos de los haces por al menos un robot artículos individuales o grupos de artículos. 10
Patentes similares o relacionadas:
MÁQUINA PALETIZADORA DE ENVASES Y PROCEDIMIENTO DE UTILIZACIÓN DE LA MISMA, del 30 de Abril de 2020, de AND & OR RESEARCH, S.L.U: Máquina paletizadora de envases y su procedimiento de utilización para conseguir la máxima compactación de los envases en bateas. La máquina comprende un bastidor, en […]
Dispositivo y procedimiento para el paletizado de pilas, del 4 de Marzo de 2020, de WINDMOLLER & HOLSCHER KG: Dispositivo para el paletizado de pilas , en particular de sacos, productos semielaborados de sacos, secciones de tubos flexibles o sacos aplanados, que comprende las […]
Aparato mejorado para paletizar automáticamente recipientes y método respectivo, del 12 de Febrero de 2020, de UNITEC S.P.A: Aparato para cargar una pluralidad de recipientes , particularmente que contienen productos vegetales, sobre palés, que comprende: - un primer conjunto que consiste […]
Dispositivo de detección y método para un dispositivo de transferencia de capa, del 20 de Noviembre de 2019, de Gebo Packaging Solutions Italy SRL: Un método de transferencia para utilizar un dispositivo de transferencia que funciona como dispositivo de desmontaje de palé, a fin de transferir capas preformadas […]
Procedimiento para producir pilas de hojas, del 5 de Junio de 2019, de BW Papersystems Stuttgart GmbH: Procedimiento para producir pilas de hojas en el que está previsto que para salvar una separación vertical entre el nivel de suministro de las hojas […]
Dispositivo de transferencia de capas preconformadas de objetos a la parte superior de una paleta, del 5 de Junio de 2019, de Gebo Packaging Solutions Italy SRL: Dispositivo de transferencia de capas preconformadas de objetos a la parte superior de una paleta estandarizada, que comprende: - una columna de guiado […]
Dispositivo de carga, del 5 de Junio de 2019, de BEUMER Group GmbH & Co. KG: Dispositivo de carga para cargar elementos de carga fraccionada por capas en una superficie de carga , con un cabezal de carga que puede desplazarse al menos […]
Dispositivo de alimentación para alimentar con sacos llenos un dispositivo de paletización, del 17 de Abril de 2019, de WINDMOLLER & HOLSCHER KG: Dispositivo de paletización para una pila de sacos llenos para formar una pila de sacos, que presenta un dispositivo de elevación , así como un dispositivo […]