ESTACION DE TRABAJO CON SOPORTE DE PIEZAS DE VARIAS CARAS Y METODO DE PILOTAJE DE UNA ESTACION DE ESTE TIPO.
Estación de trabajo (1) robotizada que comporta al menos un robot multieje manipulador (7) de piezas teniendo un brazo (9) con una extremidad libre provista de un soporte (10) de piezas,
una primera unidad operacional (5) y una segunda unidad operacional (6) para cooperar funcionalmente con el soporte, el soporte que comporta un cuerpo (11) provisto de emplazamientos (14) de recepción de pieza caracterizado por el hecho de que los emplazamientos están dispuestos para ser simultáneamente accesibles cada uno por una de las unidades operacionales
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2007/001479.
Solicitante: ABB FRANCE.
Nacionalidad solicitante: Francia.
Dirección: 9, AVENUE EDOUARD BELIN,92566 RUEIL MALMAISON.
Inventor/es: DEMIT, DANIEL, MALATIER, FRANCOIS, LEGELEUX,FABRICE.
Fecha de Publicación: .
Fecha Concesión Europea: 24 de Febrero de 2010.
Clasificación Internacional de Patentes:
- B23P21/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23P OTROS PROCEDIMIENTOS PARA EL TRABAJO DEL METAL NO PREVISTOS EN OTRO LUGAR; OPERACIONES MIXTAS; MAQUINAS HERRAMIENTAS UNIVERSALES (dispositivos para el copiado o el control B23Q). › Máquinas para el montaje de numerosas piezas diferentes destinadas a componer conjuntos, con o sin trabajo de estas piezas antes o después de su montaje, p. ej. por control programado.
- B25J9/16T1
Clasificación PCT:
- B25J9/16 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Fragmento de la descripción:
Estación de trabajo con soporte de piezas de varias caras y método de pilotaje de una estación de este tipo.
La presente invención se refiere a una estación de trabajo y un método de pilotaje de una tal estación de trabajo. Una estación de trabajo de este tipo es utilizable por ejemplo para la fabricación de piezas de carrocería de vehículos automóviles. El documento US 5 479 698 ha descrito tal estación de trabajo, según el preámbulo de la reivindicación 1 y un tal método según el preámbulo de la reivindicación 13.
Segundo plano de la invención
Una estación de trabajo incluye habitualmente un bastidor sobre el cual está fijado como mínimo un robot manipulador de piezas y una unidad operacional destinada a realizar al menos una operación sobre las piezas, como una operación de ensamblaje, de soldadura, de engastado u otro. El robot manipulador es generalmente pilotado para cargar las piezas en un soporte solidario del bastidor y dispuesto para mantener la pieza en una posición predeterminada para servir de referencia geométrica para la operación realizada por la unidad operacional. Una vez la operación terminada, el robot manipulador agarra la pieza para depositarla fuera de la estación de trabajo.
Los usuarios de tales estaciones de trabajo tienen habitualmente una necesidad de rentabilidad, es decir de explotar al máximo las estaciones de trabajo y los elementos que las componen, y de flexibilidad de manera que las estaciones de trabajo puedan estar fácilmente adaptadas a diferentes tipos de piezas, a diferentes ritmos y a modificaciones del proceso de fabricación, sin embargo sin que esta necesidad de flexibilidad tenga que ser satisfecha en detrimento de la rentabilidad. Además, parece necesario volver las estaciones de trabajo cada vez más compactas con el fin de explotar de forma óptima la superficie disponible sin embargo sin sacrificar su flexibilidad.
Objeto de la invención
Un objetivo de la invención es proponer una estación de trabajo que permite satisfacer al menos en parte las necesidades arriba enunciadas.
Resumen de la invención
Con este fin, se prevé, según la invención, una estación de trabajo robotizada, incluyendo al menos un robot multieje manipulador de piezas teniendo un brazo con una extremidad libre provista de un soporte de piezas, una primera unidad operacional y una segunda unidad operacional para cooperar funcionalmente con el soporte, el soporte incluyendo un cuerpo provisto de emplazamientos de recepción de piezas dispuestas para ser simultáneamente accesibles cada una por una de las unidades operacionales.
De este modo, el posicionamiento de las piezas en la estación es asegurado por el robot manipulador y las unidades operacionales pueden operar simultáneamente sobre el soporte posicionado por el robot manipulador. Es entonces posible efectuar las operaciones en tiempo oculto y compensar las variaciones dimensionales entre las series de piezas modificando la posición y la inclinación del soporte en la estación.
De preferencia, el cuerpo del soporte incluye varias caras que definen cada una un emplazamiento de recepción de piezas y, ventajosamente, los emplazamientos se instalan sobre dos caras opuestas del cuerpo, el cuerpo estando instalado sobre la extremidad libre del brazo del robot manipulador para pivotar alrededor de un eje extendiéndose simétricamente respecto a las caras.
Este modo realización es particularmente ventajoso ya que limita los riesgos de interferencias entre las unidades operacionales cooperando simultáneamente con el soporte.
De preferencia de nuevo, la estación incluye al menos tantas unidades operacionales susceptibles de cooperar funcionalmente con el soporte que el cuerpo del soporte cuenta con caras provistas de emplazamiento de recepción de pieza.
Esto permite explotar plenamente las posibilidades ofrecidas por el acondicionamiento de varios emplazamientos de piezas sobre el soporte.
Ventajosamente, una de las unidades operacionales está dispuesta para cooperar operacionalmente con varias caras del soporte sucesivamente.
La invención tiene igualmente como objetivo, un método de pilotaje de una estación de trabajo que comporta al menos un robot manipulador teniendo un brazo con una extremidad libre provista de un soporte provisto de al menos un primer y un segundo emplazamientos de recepción de pieza, una primera unidad operacional bajo la forma de un robot de carga de pieza en los emplazamientos, y una segunda unidad operacional, los emplazamientos estando dispuestos para ser accesibles simultáneamente cada uno por el robot de carga y la segunda unidad operacional, el método incluyendo las etapas de:
La carga de la pieza es de este modo realizada en tiempo oculto.
Otras características y ventajas de la invención resaltarán en la lectura de la siguiente descripción de modos de realización particulares no limitativos de la invención.
Breve descripción de los dibujos
Se hará referencia a los dibujos anexos, entre los cuales:
- la figura 1 es una vista esquemática en elevación de una estación de trabajo conforme a un primer modo de realización de la invención,
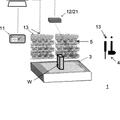
- la figura 2 es una vista esquemática parcial de una estación de trabajo conforme a un segundo modo de realización de la invención.
Descripción detallada de la invención
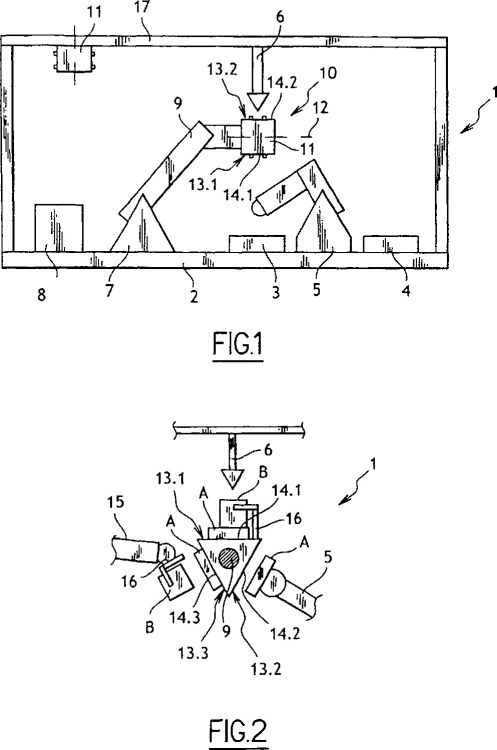
En referencia a la figura 1, la estación de trabajo conforme al primer modo de realización se destina a asegurar la soldadura final de una pieza que comporta dos partes pre-ensambladas.
La estación de trabajo, generalmente designada en 1, incluye un bastidor 2 sobre el cual se instalan un transportador 3 de evacuación de piezas, un transportador 4 de evacuación de piezas, una primera unidad operacional 5, una segunda unidad operacional 6 y un robot manipulador 7 multieje. Los transportadores 3, 4, las unidades operacionales 5, 6 y el robot manipulador 7 se conectan a una unidad de pilotaje 8 que incluye un sistema informático que ejecuta un programa dispuesto para hacer funcionar de manera coordinada los elementos anteriormente citados que constituyen la estación de trabajo 1.
El bastidor 2 incluye de manera conocida en si una planta que descansa sobre el suelo y sobre la cual está montada una armadura y rodeada por una cintura de protección no visible en la figura 1 (rejillas, envoltura ...). La planta permite fijar la estación de trabajo 1 al suelo e incluye los pasajes para los cables eléctricos de alimentación y de mando de los componentes de la estación de trabajo 1. La planta puede además ser dispuesta para formar una parte de una línea modular de producción por ejemplo incorporando los medios de su enlace funcional en relación a una estación de trabajo adyacente. Los medios de enlace funcional tienen por ejemplo medios de enlace mecánico de las estaciones entre ellas, medios de interconexión de los cables de alimentación y/o de mando de las estaciones de trabajo...
Los transportadores 3 y 4 están constituidos cada uno de una línea de transporte sin fin montada sobre el bastidor 2 de tal manera que cada transportador 3, 4 tenga una extremidad en proximidad a la primera unidad operacional 5 y una extremidad opuesta a la vecindad de un borde de la estación de trabajo 1. Fuera de la estación, las piezas se cargan sobre el transportador 3 de conducción y se descargan del transportador 4 de evacuación por ejemplo por un operador o un robot.
La primera unidad operacional 5 se forma de un robot de carga/descarga pilotado para agarrar las piezas que deben ser trabajadas sobre el transportador 3 y para depositar las piezas trabajadas sobre el transportador 4.
La segunda unidad operacional 6 es aquí una cabeza de soldadura láser montada sobre la armadura del bastidor 2 sensiblemente por encima del robot de carga/descarga 5. La cabeza de soldadura 6 posee un desplazamiento angular y es desplazable angularmente según...
Reivindicaciones:
1. Estación de trabajo (1) robotizada que comporta al menos un robot multieje manipulador (7) de piezas teniendo un brazo (9) con una extremidad libre provista de un soporte (10) de piezas, una primera unidad operacional (5) y una segunda unidad operacional (6) para cooperar funcionalmente con el soporte, el soporte que comporta un cuerpo (11) provisto de emplazamientos (14) de recepción de pieza caracterizado por el hecho de que los emplazamientos están dispuestos para ser simultáneamente accesibles cada uno por una de las unidades operacionales.
2. Estación según la reivindicación 1, en la cual el cuerpo (11) del soporte (10) incluye varias caras (13) que definen cada una un emplazamiento (14) de recepción de piezas.
3. Estación según la reivindicación 2, en la cual los emplazamientos (14) se instalan sobre dos caras (13) opuestas del cuerpo (11), el cuerpo estando instalado sobre la extremidad libre del brazo (9) del robot manipulador (7) para pivotar alrededor de un eje (12) extendiéndose simétricamente respecto a las caras.
4. Estación según la reivindicación 2, que incluye al menos tantas unidades operacionales (5, 6, 15) susceptibles de cooperar funcionalmente con el soporte (10) que el cuerpo (11) del soporte (10) cuenta con caras (13) provistas de emplazamientos (14) de recepción de pieza.
5. Estación según la reivindicación 1, en la cual el robot manipulador (7) incluye un cambiador de soporte.
6. Estación según la reivindicación 5, en la cual al menos una de las unidades operacionales (5, 6) está dispuesta para cooperar operacionalmente con al menos dos caras del soporte (11) sucesivamente.
7. Estación según la reivindicación 1, en la cual los emplazamientos (14) están provistos de medios de puesta en geometría de las piezas.
8. Estación según la reivindicación 1, en la cual al menos uno de los emplazamientos (14) está provisto de medios de retención de un bastidor de mantenimiento adicional (16) de una pieza que se debe ensamblar a una pieza posicionada en el emplazamiento.
9. Estación según la reivindicación 1, en la cual la primera unidad operacional es un robot de carga (5) de piezas sobre el soporte (10).
10. Estación según la reivindicación 1, en la cual la primera unidad operacional es un robot de descarga (5) de piezas del soporte (10).
11. Estación según la reivindicación 1, en la cual la segunda unidad operacional es una cabeza de trabajo (6) sensiblemente fija, la estación incluyendo una unidad de pilotaje (8) dispuesta para coordinar los movimientos del robot manipulador (7) y de la primera unidad operacional (5).
12. Estación según la reivindicación 11, en la cual el robot manipulador (7, 5) y al menos una de las unidades operacionales se conectan a una misma unidad de pilotaje (8).
13. Método de pilotaje de una estación de trabajo incluyendo al menos un robot manipulador (7) que tiene un brazo (9) con una extremidad libre provista de un soporte (10) provisto de por lo menos un primer y un segundo emplazamientos (14.1, 14.2) de recepción de pieza, una primera unidad operacional y una segunda unidad operacional (6), caracterizado por el hecho de que la primera unidad operacional es un robot de carga (5) de pieza en los emplazamientos, los emplazamientos estando dispuestos para ser accesibles simultáneamente cada uno por el robot de carga y la segunda unidad operacional, y por el hecho de que el método incluye las etapas de:
14. Método según la reivindicación precedente, en el cual, en el momento de la operación, el robot manipulador (7) desplaza el soporte (10) y el robot de carga (5) se acciona en coordinación con el robot manipulador para cargar la pieza en el segundo emplazamiento.
Patentes similares o relacionadas:
 Puesto de mecanizado, del 25 de Septiembre de 2019, de HOMAG GmbH: Puesto de mecanizado, en particular puesto de trabajo de montaje, en el que pueden ejecutarse operaciones de mecanizado manuales y/o parcialmente automatizadas, en particular […]
Puesto de mecanizado, del 25 de Septiembre de 2019, de HOMAG GmbH: Puesto de mecanizado, en particular puesto de trabajo de montaje, en el que pueden ejecutarse operaciones de mecanizado manuales y/o parcialmente automatizadas, en particular […]
Instalación de fabricación y procedimiento de fabricación, del 4 de Septiembre de 2019, de KUKA SYSTEMS GMBH: Planta de fabricación para piezas de trabajo , especialmente para componentes de carrocería, presentando la instalación de fabricación una zona de fabricación con […]
Línea de fabricación provista de uno o varios módulos para transportar recipientes para suministrar piezas o componentes a puestos de montaje a lo largo de la línea, del 21 de Agosto de 2019, de COMAU S.P.A.: Línea de fabricación , que comprende: - como mínimo un puesto de montaje , - un dispositivo transportador de cadena que comprende una cadena […]
 Dispositivo y procedimiento para la sincronización del movimiento de un medio de mecanizado automático con el movimiento de una pieza de trabajo, del 31 de Julio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para la sincronización del movimiento de un medio de mecanizado automático (BM) con el movimiento de una pieza de trabajo (WS) transportada durante el mecanizado […]
Dispositivo y procedimiento para la sincronización del movimiento de un medio de mecanizado automático con el movimiento de una pieza de trabajo, del 31 de Julio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para la sincronización del movimiento de un medio de mecanizado automático (BM) con el movimiento de una pieza de trabajo (WS) transportada durante el mecanizado […]
 Sistema de transporte flexible, del 31 de Mayo de 2019, de Kuka Systems North America LLC: Sistema de transporte flexible para la fabricación de líneas de montaje, que comprende:
- un raíl que transporta piezas;
- un elemento […]
Sistema de transporte flexible, del 31 de Mayo de 2019, de Kuka Systems North America LLC: Sistema de transporte flexible para la fabricación de líneas de montaje, que comprende:
- un raíl que transporta piezas;
- un elemento […]
Sistema integrado de entrega y construcción de piezas de vehículo, del 14 de Mayo de 2019, de Comau LLC: Un procedimiento para proporcionar una entrega de piezas coordinada para su uso en una secuencia de construcción aleatoria predeterminada en líneas de montaje […]
Sistema y procedimiento de montaje guiado por luz, del 20 de Marzo de 2019, de OPS Solutions, LLC: Un método para proyectar indicadores visuales sobre un objeto físico para guiar las acciones de un individuo, comprendiendo dicho método: […]
Línea de producción, del 21 de Febrero de 2019, de COMAU S.P.A.: Línea de producción que comprende: - al menos una estación de ensamblaje , - un dispositivo transportador de cadena que comprende una cadena […]