MANIPULADOR CINEMATICO PARALELO Y METODO DE FUNCIONAMIENTO DEL MISMO, QUE INCLUYE ACCIONADORES EMPAREJADOS.
Un robot industrial incluyendo un manipulador cinemático paralelo incluyendo una plataforma estacionaria,
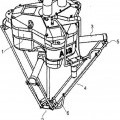
una plataforma móvil (20; 418), y tres brazos que conectan la plataforma estacionaria con la plataforma móvil (20; 418), incluyendo el primer brazo una primera parte de brazo (6; 47) y una segunda parte de brazo articulado (8; 420), incluyendo el segundo brazo una primera parte de brazo (7; 48) y una segunda parte de brazo articulado (9; 422), e incluyendo cada brazo un accionador (3, 4, 5; 41, 42, 43) a saber, un primer, un segundo y un tercer accionador respectivamente para mover el brazo en relación a la plataforma estacionaria, donde el tercer brazo (10; 49) incluye una sola articulación (19; 417) que conecta el tercer brazo con la plataforma móvil (20; 418) mediante juntas respectivas (19A, 19B, 417B) y la primera parte de brazo (6; 47) del primer brazo incluye un cuarto accionador adicional (21; 419) dispuesto para girar la segunda parte de brazo articulado (8; 420) del primer brazo alrededor de un primer eje (A) basculando por ello la plataforma (20; 418) alrededor de un primer eje de basculamiento, la primera parte de brazo (7; 48) del segundo brazo se ha previsto incluyendo un quinto accionador adicional (22; 421) dispuesto para girar la segunda parte de brazo (9; 422) del segundo brazo alrededor de un segundo eje (B) basculando por ello la plataforma (20; 418) alrededor de un segundo eje de basculamiento, caracterizado porque la segunda parte de brazo (8; 420) del primer brazo incluye tres articulaciones (14; 15, 16; 412, 413, 414) montadas, en su extremo respectivo, en la segunda parte de brazo (8; 420) del primer brazo mediante elementos (11, 12; 410) y juntas respectivas (14A, 15A; 23A; 16A) teniendo cada una al menos dos grados de libertad, y montadas, en su otro extremo respectivo, en la plataforma móvil (20; 418) con juntas respectivas (14B, 15B, 16B; 412B, 413B, 414B) teniendo cada una al menos dos grados de libertad; la segunda parte de brazo (9; 48) del segundo brazo incluye dos articulaciones (17, 18; 415, 416) montadas, en su extremo respectivo, en la segunda parte de brazo (9; 422) del segundo brazo mediante un elemento (13; 411) y juntas respectivas (17A, 18A) teniendo cada una al menos dos grados de libertad y montadas, en su otro extremo respectivo, en la plataforma móvil (20; 418) con juntas respectivas (17B, 18B; 415B, 416B) que tienen al menos dos grados de libertad y porque, al bascular, la plataforma (20; 418) se hace bascular alrededor de un eje arbitrario obteniendo cinco grados de libertad
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2003/002056.
Solicitante: ABB AB.
Nacionalidad solicitante: Suecia.
Dirección: KOPPARBERGSVAGEN 2,721 83 VASTERAS.
Inventor/es: BROGARDH, TORGNY, JOHANSSON, JAN, LUNDBERG,IVAN, WAPPLING,DANIEL, FENG,XIAOLONG, ROBBERTS,OLA, FRISK,MARTIN, PERSSON,JAN-GUNNAR.
Fecha de Publicación: .
Fecha Concesión Europea: 17 de Febrero de 2010.
Clasificación Internacional de Patentes:
- B23Q1/54B3
- B23Q1/54C3
- B25J17/02F2
Clasificación PCT:
- B23Q1/44 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › utilizando mecanismos especiales (B23Q 1/26 tiene prioridad).
- B25J17/02 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
Clasificación antigua:
Fragmento de la descripción:
Manipulador cinemático paralelo y método de funcionamiento del mismo, que incluye accionadores emparejados.
Campo técnico
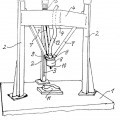
La presente invención se refiere a un robot industrial, incluyendo un manipulador y una unidad de control que tiene medios para operar automáticamente el manipulador. El manipulador incluye un manipulador cinemático paralelo incluyendo al menos tres brazos, incluyendo cada uno una disposición de articulación. Las tres disposiciones de articulación soportan conjuntamente, directa o indirectamente, un elemento operativo de plataforma dispuesto para ejecutar la función deseada.
La expresión "manipulador cinemático paralelo", PKM, se define como un manipulador incluyendo un primer elemento estacionario, un segundo elemento móvil (plataforma) y al menos tres brazos. Cada brazo incluye una primera parte de brazo de soporte y una segunda parte de brazo, constando ésta última de una disposición de articulación conectada a la plataforma móvil. Cada primera parte de brazo es accionada por unos medios de accionamiento dispuestos preferiblemente en el elemento estacionario para reducir la masa móvil. Estas disposiciones de articulación transfieren fuerzas debido al accionamiento de las primeras partes de brazo de soporte al manipular la plataforma móvil.
Antecedentes de la invención
El robot de tipo conocido llamado robot SCARA es un manipulador cinemático serie usado primariamente para mover y girar objetos sin cambiar la inclinación de los objetos. El manipulador incluye articulaciones cinemáticas acopladas en serie. Estos robots tienen normalmente cuatro grados de libertad en las direcciones x, y, z y
Varias propiedades relativas al robot SCARA se mejoran con un robot, que manipula un objeto mediante operación en paralelo, es decir un manipulador cinemático paralelo, PKM. Según la descripción anterior, un robot cinemático de serie incluye una masa grande y así se adapta a frecuencias naturales mecánicas bajas, la exactitud es limitada y se requieren pares motores grandes para hacer posibles los movimientos de alta aceleración, sacudida y velocidad.
Un robot cinemático paralelo es un diseño que ofrece un alto grado de capacidad de carga, alta rigidez, altas frecuencias naturales y bajo peso. Se requieren tres brazos que trabajan en paralelo para lograr la manipulación de una plataforma en tres grados de libertad, es decir, las direcciones x, y y z en un sistema de coordenadas cartesianas. Se requieren seis brazos que trabajan en paralelo para lograr la manipulación de una plataforma en los seis grados de libertad, es decir las direcciones x, y, z y el ángulo de rotación/inclinación de un objeto colocado en la plataforma.
Idealmente, un objeto debería ser manipulado por un total de seis articulaciones separadas, que transfieren solamente fuerzas de compresión y de tracción al objeto manipulado para lograr una manipulación rígida y exacta. Generalmente, el PKM incluye de tres a seis primeras partes de brazo. Como un ejemplo, un manipulador con cuatro brazos diseñado para cuatro grados de libertad tiene segundas partes de brazo que comparten la seis articulaciones separadas. Esto solamente es posible con ciertas combinaciones de las articulaciones, como por ejemplo, 2/2/1/1 o 3/1/1/1. 2/2/1/1 significa que dos primeras partes de brazo de soporte están conectadas a la respectiva segunda parte de brazo, que incluye dos articulaciones y otras dos primeras partes de brazo de soporte están conectadas a la respectiva segunda parte de brazo, que incluye una sola articulación.
Un manipulador conocido manipula una plataforma, que no cambia la inclinación en toda la zona de trabajo. El robot tiene tres primeras partes de brazo de soporte, cada una conectada a una segunda parte de brazo, en paralelismo cinemático. A partir de este robot, es conocido disponer un total de seis articulaciones opcionalmente distribuidas en tres primeras partes de brazo según las combinaciones 2/2/2 o 3/2/1.
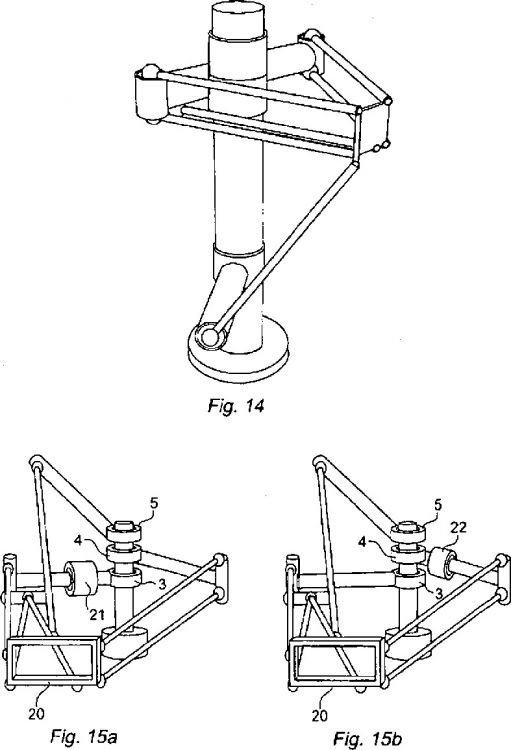
Un dispositivo conocido para movimiento relativo de un primer elemento en relación a un segundo elemento según la combinación 2/2/2 se describe en la solicitud internacional WO 99/58301. Los tres brazos incluyen una primera parte de brazo de soporte conectada a una segunda parte de brazo, que incluye una disposición de articulación. El primer elemento se describe como estacionario y el segundo elemento es manipulado en las direcciones x, y y z por medios de accionamiento. Cada disposición de articulación está conectada a una primera parte de brazo de soporte y al segundo elemento, respectivamente, por medio de juntas de 2 o 3 grados de libertad. Cada medio de accionamiento incluye una porción estacionaria y una porción rotativa, donde la porción estacionaria está incluida en el primer elemento estacionario. Usando los números de referencia en el documento, cada medio de accionamiento tiene su porción rotativa conectada a las primeras partes de brazo 6, 7 y 8. Los medios de accionamiento 3 pivotan la primera parte de brazo 6 y los medios de accionamiento 4 pivotan la primera parte de brazo 7 alrededor del mismo eje geométrico 37. Los terceros medios de accionamiento 5 pivotan la primera parte de brazo 8 alrededor de un eje geométrico 38, que es no paralelo con el eje de pivote 37. Los terceros medios de accionamiento 5 implican que, al pivote de la parte de brazo de soporte 7 por medio de los medios de accionamiento 4, también la parte de brazo de soporte 8 lo acompañará como consecuencia del hecho de que un eje 53 y también una rueda dentada 10 acompañarán el movimiento de pivote. Así, los medios de accionamiento 4 y 5 deben acelerar más y están más fuertemente cargados en comparación con los medios de accionamiento 3. En consecuencia, este diseño de manipulador necesita tres diseños diferentes de medios de accionamiento con tres dimensiones de accionamiento diferentes. Esto hace más complicado el diseño y que el manipulador sea relativamente caro de procesar. Otra consecuencia es que los primeros medios de movimiento soportan el momento de inercia más alto y habrá una distribución no uniforme del momento de inercia en el manipulador. Además, las frecuencias naturales mecánicas serán inferiores a causa de la masa extra que el eje 2 tiene que girar, lo que da un control menos exacto a frecuencias de movimiento más altas.
Un dispositivo para movimiento relativo de un primer y un segundo elemento según la segunda combinación 3/2/1 se describe en la solicitud internacional WO 97/33726. El dispositivo incluye un manipulador incluyendo tres brazos dispuestos para conectar una plataforma estacionaria y otra móvil. Cada brazo incluye una primera parte de brazo de soporte y una segunda parte de brazo conectadas una a otra, donde la respectiva segunda parte de brazo incluye una disposición de articulación. Tres accionadores están fijados a la plataforma estacionaria y accionan una primera parte de brazo cada uno. Una primera parte de brazo de soporte está conectada a una disposición de articulación de segunda parte de brazo incluyendo tres articulaciones en paralelo. Otra primera parte de brazo está conectada a una disposición de articulación doble y otra primera parte de brazo está conectada a una sola articulación, donde todas las articulaciones están conectadas a la plataforma móvil.
El documento US 5.539.291 representa un manipulador cinemático paralelo. Un soporte sostiene una parte de brazo de soporte biaxial controlable. Esta parte de brazo soporta, a su vez, una segunda parte de brazo, que sostiene un objeto móvil. Un primer y un tercer brazo de soporte que pivotan alrededor de un eje común de pivote, están conectados al objeto móvil mediante brazos exteriores incluyendo correas con la función de una combinación entre una parte de brazo y una cuarta articulación. Los brazos exteriores y el segundo brazo de soporte están dispuestos para transmitir fuerzas de compresión y de tracción así...
Reivindicaciones:
1. Un robot industrial incluyendo un manipulador cinemático paralelo incluyendo una plataforma estacionaria, una plataforma móvil (20; 418), y tres brazos que conectan la plataforma estacionaria con la plataforma móvil (20; 418), incluyendo el primer brazo una primera parte de brazo (6; 47) y una segunda parte de brazo articulado (8; 420), incluyendo el segundo brazo una primera parte de brazo (7; 48) y una segunda parte de brazo articulado (9; 422), e incluyendo cada brazo un accionador (3, 4, 5; 41, 42, 43) a saber, un primer, un segundo y un tercer accionador respectivamente para mover el brazo en relación a la plataforma estacionaria, donde el tercer brazo (10; 49) incluye una sola articulación (19; 417) que conecta el tercer brazo con la plataforma móvil (20; 418) mediante juntas respectivas (19A, 19B, 417B) y la primera parte de brazo (6; 47) del primer brazo incluye un cuarto accionador adicional (21; 419) dispuesto para girar la segunda parte de brazo articulado (8; 420) del primer brazo alrededor de un primer eje (A) basculando por ello la plataforma (20; 418) alrededor de un primer eje de basculamiento, la primera parte de brazo (7; 48) del segundo brazo se ha previsto incluyendo un quinto accionador adicional (22; 421) dispuesto para girar la segunda parte de brazo (9; 422) del segundo brazo alrededor de un segundo eje (B) basculando por ello la plataforma (20; 418) alrededor de un segundo eje de basculamiento, caracterizado porque la segunda parte de brazo (8; 420) del primer brazo incluye tres articulaciones (14; 15, 16; 412, 413, 414) montadas, en su extremo respectivo, en la segunda parte de brazo (8; 420) del primer brazo mediante elementos (11, 12; 410) y juntas respectivas (14A, 15A; 23A; 16A) teniendo cada una al menos dos grados de libertad, y montadas, en su otro extremo respectivo, en la plataforma móvil (20; 418) con juntas respectivas (14B, 15B, 16B; 412B, 413B, 414B) teniendo cada una al menos dos grados de libertad; la segunda parte de brazo (9; 48) del segundo brazo incluye dos articulaciones (17, 18; 415, 416) montadas, en su extremo respectivo, en la segunda parte de brazo (9; 422) del segundo brazo mediante un elemento (13; 411) y juntas respectivas (17A, 18A) teniendo cada una al menos dos grados de libertad y montadas, en su otro extremo respectivo, en la plataforma móvil (20; 418) con juntas respectivas (17B, 18B; 415B, 416B) que tienen al menos dos grados de libertad y porque, al bascular, la plataforma (20; 418) se hace bascular alrededor de un eje arbitrario obteniendo cinco grados de libertad.
2. Un robot industrial según la reivindicación 1, donde los accionadores primero, segundo y tercero (3, 4, 5) están adaptados para movimiento rotativo.
3. Un robot industrial según la reivindicación 2, donde el primer accionador (3) del primer brazo (6, 8), el primer accionador (4) del segundo brazo (7, 9), y el primer accionador (5) del tercer brazo (10) están dispuestos con ejes de rotación coincidentes.
4. Un robot industrial según cualquier reivindicación 1-3, donde el tercer brazo (10) incluye un sexto accionador adicional (24).
5. Un robot industrial según la reivindicación 4, donde una plataforma secundaria (32) dispuesta en la plataforma móvil (20) está adaptada para ser girada por el sexto accionador (24).
6. Un robot industrial según la reivindicación 1, donde el primer, el segundo o el tercer accionador respectivamente (41, 42, 43) del brazo respectivo está adaptado a movimiento lineal.
7. Un robot industrial según la reivindicación 1, donde la junta que une el tercer brazo a la plataforma móvil está en línea con las juntas que conectan las articulaciones del segundo brazo y la plataforma móvil.
8. Un robot industrial según la reivindicación 1, donde la junta que une el tercer brazo a la plataforma móvil está en línea con las juntas que conectan las articulaciones del primer brazo a la plataforma móvil.
9. Un método de operar un robot industrial incluyendo un manipulador cinemático paralelo incluyendo una plataforma estacionaria, una plataforma móvil (20; 418), y tres brazos que conectan la plataforma estacionaria con la plataforma móvil (20; 418), incluyendo el primer brazo una primera parte de brazo (6; 47) y una segunda parte de brazo articulado (8; 420), incluyendo el segundo brazo una primera parte de brazo (7; 48) y una segunda parte de brazo articulado (9; 422), e incluyendo cada brazo un accionador (3, 4, 5; 41, 42, 43), a saber, un primer, un segundo y un tercer accionador respectivamente para mover el brazo en relación a la plataforma estacionaria, por lo que el tercer brazo (10; 49) incluye una sola articulación (19; 417) que conecta el tercer brazo con la plataforma móvil (20; 418) mediante juntas respectivas (19A, 19B) y la primera parte de brazo (6; 47) del primer brazo incluye un cuarto accionador adicional (21; 419) dispuesto para girar la segunda parte de brazo articulado (8; 420) del primer brazo alrededor de un primer eje (A) basculando por ello la plataforma (20; 418) alrededor de un primer eje de basculamiento, la primera parte de brazo (7; 48) del segundo brazo se ha previsto incluyendo un quinto accionador adicional (22; 421) dispuesto para girar la segunda parte de brazo (9; 422) del segundo brazo alrededor de un segundo eje (B) basculando por ello la plataforma (20; 418) alrededor de un segundo eje de basculamiento, caracterizado porque la segunda parte de brazo (8; 420) del primer brazo incluye tres articulaciones (14, 15, 16; 412, 413, 414) montadas, en su extremo respectivo, en la segunda parte de brazo (8; 420) del primer brazo mediante elementos (11, 12; 410) y juntas respectivas (14A, 15A; 23A; 16A) teniendo cada una al menos dos grados de libertad, y montadas, en su otro extremo respectivo, en la plataforma móvil (20; 418) con juntas respectivas (14B, 15B, 16B; 412B, 413B, 414B) teniendo cada una al menos dos grados de libertad; la segunda parte de brazo (9; 48) del segundo brazo incluye dos articulaciones (17, 18; 415, 416) montadas, en su extremo respectivo, en la segunda parte de brazo (9; 422) del segundo brazo mediante un elemento (13; 411) y juntas respectivas (17A, 18A) teniendo cada una al menos dos grados de libertad y montadas, en su otro extremo respectivo, en la plataforma móvil (20; 418) con juntas respectivas (178, 18B; 415B, 416B) que tienen al menos dos grados de libertad y porque, al bascular, la plataforma (20; 418) se hace bascular alrededor de un eje arbitrario obteniendo cinco grados de libertad.
10. Un método según la reivindicación 9, donde el primer accionador (3, 4, 5) del brazo respectivo se pone en movimiento rotacional.
11. Un método según la reivindicación 10, incluyendo disponer el primer accionador (3) del primer brazo (6), el primer accionador (4) del segundo brazo (7) y el primer accionador (5) del tercer brazo (10) con ejes de rotación coincidentes.
12. Método según la reivindicación 9, donde un sexto accionador adicional (24) incluido en el tercer brazo (10) se pone en movimiento rotacional.
13. Un método según la reivindicación 12, donde el sexto accionador (24) se ha previsto para hacer girar una plataforma secundaria (32) dispuesta en la plataforma móvil (20) obteniendo seis grados de libertad.
14. Un método según la reivindicación 9, donde el primer accionador (41, 42, 43) del brazo respectivo se pone en movimiento lineal.
15. Uso del robot industrial según cualquiera de las reivindicaciones 1-8 para realizar el método según cualquier reivindicación 1-14 para compensación exacta de sus movimientos debido a los movimientos de la plataforma estacionaria y donde la plataforma estacionaria está dispuesta en un barco.
Patentes similares o relacionadas:
ROBOT PARALELO, del 18 de Agosto de 2011, de MERZ, MICHAEL: Un mecanismo para posicionar y orientar un objeto en el espacio con al menos tres grados de libertad, el mecanismo comprende: una base ; un brazo […]
 DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
DISPOSITIVO DE ROBOT INDUSTRIAL, ROBOT INDUSTRIAL Y MÉTODO PARA MANIPULAR OBJETOS, del 14 de Junio de 2011, de ABB TECHNOLOGY AB: Un dispositivo de robot industrial, incluyendo un montaje giratorio con medios de montaje para el montaje de una herramienta, definiendo el dispositivo […]
 ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
ROBOT MANIPULADOR COMPACTO, del 20 de Mayo de 2011, de MAREL HF.: Dispositivo de desplazamiento del tipo paralelo, que comprende al menos tres brazos pivotantes cada uno de ellos alrededor de un eje de pivote, formando los ejes […]
 MÁQUINA DE CINEMÁTICA PARALELA, del 6 de Mayo de 2011, de EXECHON AB: Máquina de cinemática paralela que incluye al menos tres dispositivos de ajuste que pueden alargarse y acortarse individualmente, […]
MÁQUINA DE CINEMÁTICA PARALELA, del 6 de Mayo de 2011, de EXECHON AB: Máquina de cinemática paralela que incluye al menos tres dispositivos de ajuste que pueden alargarse y acortarse individualmente, […]
 ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
ROBOT PARALELO PARA HERRAMIENTAS, del 5 de Mayo de 2011, de FAUDE, DIETER: Dispositivo para el movimiento tridimensional de un objeto - con un portaobjetos , - con un elemento básico que presenta tres elementos de apoyo dispuestos […]
 ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT, del 28 de Abril de 2011, de ABB AB: Un robot industrial para el desplazamiento de un objeto en el espacio que comprende: - una plataforma dispuesta para acarrear el objeto, […]
ROBOT CINEMÁTICO PARALELO Y PROCEDIMIENTO DE CONTROL DE ESTE ROBOT, del 28 de Abril de 2011, de ABB AB: Un robot industrial para el desplazamiento de un objeto en el espacio que comprende: - una plataforma dispuesta para acarrear el objeto, […]
 ROBOT INDUSTRIAL, del 25 de Marzo de 2011, de ABB AB: Un robot industrial para movimiento de un objeto en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir […]
ROBOT INDUSTRIAL, del 25 de Marzo de 2011, de ABB AB: Un robot industrial para movimiento de un objeto en espacio incluyendo una plataforma (1, 1a-1g) dispuesta para transportar el objeto, un primer brazo dispuesto para influir […]
 ROBOT PARALELO DE ALTA VELOCIDAD CON CUATRO GRADOS DE LIBERTAD, del 16 de Marzo de 2011, de FUNDACION TECNALIA RESEARCH & INNOVATION: Este robot paralelo comprende cuatro cadenas cinemáticas artculadas por uno de sus extremos a una plataforma móvil que prta la herramienta y por su […]
ROBOT PARALELO DE ALTA VELOCIDAD CON CUATRO GRADOS DE LIBERTAD, del 16 de Marzo de 2011, de FUNDACION TECNALIA RESEARCH & INNOVATION: Este robot paralelo comprende cuatro cadenas cinemáticas artculadas por uno de sus extremos a una plataforma móvil que prta la herramienta y por su […]