PROCEDIMIENTO Y DISPOSITIVO PARA LA ALINEACIÓN DE MÚLTIPLES EJES DE UN CAMIÓN.
Cabezal de alineación de ruedas intermedio (210; 561, 562; 561,
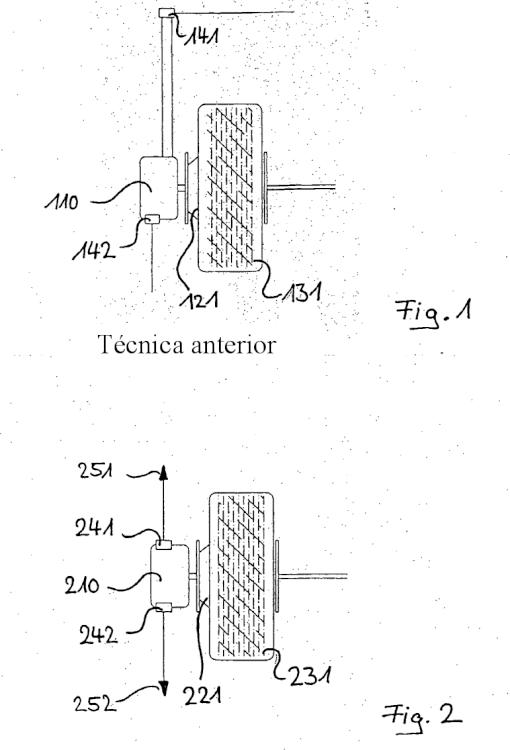
562, 563, 564) para utilizar en un servicio de alineación de ruedas para un vehículo (500; 501) teniendo al menos tres ejes (511, 512, 513; 511, 512, 513, 514), de los cuales uno es un eje delantero (513), uno es un eje trasero (511) y al menos uno es un eje intermedio (512; 512, 514), dicho cabezal de alineación de ruedas intermedio (210; 561, 562; 561, 562, 563, 564) - pudiendo acoplarse a una rueda (231; 535, 536, 535, 536, 537, 538) del vehículo (500; 501), - comprendiendo dos funcionalidades de medición de alineación dirigidas en direcciones opuestas (251, 252), en el que una primera funcionalidad de medición de alineación (241; 571, 573; 571, 573, 575, 577) está dirigida en una primera dirección (251) hacia el eje delantero (513), y una segunda funcionalidad de medición de alineación (242; 572, 574; 572, 574, 576, 578) está dirigida en una segunda dirección (252) hacia el eje trasero (511), caracterizado por el hecho de que dicho cabezal de alineación de ruedas intermedio (210; 561, 562; 561, 562, 563, 564) está - destinado a acoplarse a una rueda (231; 535, 536; 535, 536, 537, 538) de al menos un eje intermedio (512; 512, 514), y - configurado para interactuar al mismo tiempo con dos otros cabezales de alineación de ruedas acoplados al eje delantero (513), el eje trasero (511) u otro eje intermedio (512; 512, 514) mediante la primera funcionalidad de medición de alineación (571, 573; 571, 573, 575, 577) y la segunda funcionalidad de medición de alineación (572, 574; 572, 574, 576, 578), en el que cada una de dichas primera funcionalidad de medición de alineación (241; 571, 573; 571, 573, 575, 577) y segunda funcionalidad de medición de alineación (242; 572, 574; 572, 574, 576, 578) comprenden al menos sensores ópticos configurados para funcionar como un goniómetro y medios emisores de haces de luz para emitir un haz de luz en dicha dirección respectiva, para que la primera funcionalidad de medición de alineación (571, 573; 571, 573, 575, 577) puede interactuar con un primer cabezal de alineación de ruedas (521, 522; 521, 522, 563, 564) acoplado a un eje (513; 513, 514) adyacente al al menos un eje intermedio en dirección de dicho eje delantero (513) y la segunda funcionalidad de medición de alineación (572, 574; 572, 574, 576, 578) puede interactuar con un segundo cabezal de alineación de ruedas (523a, 524a; 523b, 524b; 523a, 524a, 561, 562) acoplado a un eje (511; 511; 512) adyacente al al menos un eje intermedio en dirección del eje trasero (511)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05000061.
Solicitante: SNAP-ON EQUIPMENT SRL A UNICO SOCIO..
Nacionalidad solicitante: Italia.
Dirección: VIA PROVINCIALE PER CARPI, 33 42015 CORREGGIO (REGGIO EMILIA ITALIA.
Inventor/es: BRAGHIROLI, FRANCESCO.
Fecha de Publicación: .
Fecha Solicitud PCT: 4 de Enero de 2005.
Clasificación Internacional de Patentes:
- G01B11/275B
Clasificación PCT:
- G01B11/275 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para ensayar la alineación de ruedas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2362206_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un cabezal de alineación intermediario para la alineación de múltiples ejes de vehículos, en particular a un sistema de alineación respectivo y a un procedimiento de alineación respectivo.
En referencia a la técnica de alineación de ruedas, se conoce que una alineación de ruedas completa y adecuada es un asunto muy importante, dado que un alineamiento defectuoso de las ruedas causa un desgaste de los neumáticos irregular y rápido, manipulación indebida, excesiva resistencia al rodamiento, así como un aumento del consumo de combustible. La mayoría de los vehículos pesados, también llamados camiones, tiene tres o más ejes. Normalmente, solo un eje es de dirección, sin embargo, en algunos casos, dos de los ejes son de dirección; también hay vehículos que tienen más de un eje motor, p. ej., el caso de dos ejes motores adyacentes, estos ejes motores también se llaman tándem.
EP 0.769.676 describe un sistema de alineación para camiones con múltiples cabezales de alineación de ruedas, que pueden montarse en las ruedas de un camión, en el que un cabezal se monta sobre el lado longitudinal de un camión y el cabezal es adecuado para realizar mediciones en una dirección hacia delante y una dirección hacia detrás.
En EP 0.880.009 se describe un dispositivo para medir ángulos de ruedas, en el que el dispositivo está fijado de forma pivotable a una rueda trasera de un vehículo y en la parte delantera hay disposiciones de marcación de ruedas y un dispositivo de marcación dispuesto perpendicular de forma relativa a la dirección longitudinal del vehículo.
Los típicos datos necesarios en la alineación de vehículos de cuatro ruedas son caída, convergencia, avance, etcétera, que deben medirse y controlarse para obtener una alineación adecuada. En resumen, la convergencia o convergencia individual se conoce como el ángulo dibujado por una línea a través de un plano de una rueda referenciada al eje de empuje del vehículo; en particular, la convergencia positiva se produce cuando las líneas horizontales se cruzan enfrente del vehículo y la convergencia negativa significa que las líneas se cruzan por detrás de la rueda. La caída describe el ángulo formado por la inclinación hacia delante o hacia atrás de la rueda referenciada a una línea vertical; en particular, la caída es positiva cuando la rueda se inclina hacia fuera en la parte superior y es negativa cuando la rueda se inclina hacia dentro en la parte superior. El avance se refiere a la inclinación hacia delante o hacia atrás de los ejes de dirección en referencia a una línea vertical; en particular, el avance de pivote es positivo cuando la parte superior del eje de dirección se inclina hacia atrás y es negativo cuando se inclina hacia delante.
Además de estos datos necesarios mencionados anteriormente, hay otros elementos que se pueden medir y controlar. Por ejemplo, el ángulo de desgaste del tándem es el ángulo formado por las dos líneas de empuje de los dos ejes de dirección en un tándem. La línea de tope es el bisector del ángulo de convergencia total de un eje trasero y representa la dirección del eje en comparación con la línea central del vehículo. La línea central geométrica de un vehículo es una línea dibujada a través de los puntos centrales del eje central y el eje de referencia trasero. El denominado ángulo de tope es el ángulo formado por la línea central geométrica y la línea de tope de un eje. Si el ángulo de tope de ambos ejes traseros es diferente, el resultado es un problema de paralelismo del eje tándem conocido generalmente como ángulo de desgaste de tándem, eje oblicuo, o tram. En movimiento, el eje de dirección debe girarse para desviar el empuje de estos ejes desalineados para mantener el movimiento recto del vehículo. Esto causará que cada neumático del vehículo se desgaste. La alineación conjunta de los ejes tándem y la alineación posterior de un eje de dirección independiente solo logra una parte de la tarea. El eje de dirección no solo debe tener una convergencia positiva correcta, sino que también debe hacer referencia a la línea de tope de todos los ejes traseros.
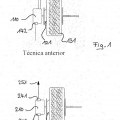
En la figura 1 se representa un cabezal de alineación de ruedas convencional 110 aplicado en una llanta 121 de una rueda 131 de un vehículo motor (no mostrado); el cabezal de alineación de rueda 110 incluye dos sensores ópticos 141 y 142 para determinar ángulos característicos de la rueda 131. Cada uno de los sensores de medición 141, 142 incluye dos funcionalidades de medición de ángulos ópticos.
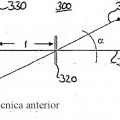
La figura 3 muestra muy esquemáticamente el principio general de tales funcionalidades de medición de ángulos ópticos 300, que están constituidas esquemáticamente por un sensor de imagen lineal 330, que comprende una línea de elementos fotosensibles, y por un dispositivo óptico 320, que puede ser una lente y tiene la tarea de guiar un haz de luz 340 en los elementos fotosensibles de sensor de imagen lineal 320 en la dirección en la que se realiza la medición angular. En la figura 3, el haz de luz 340 proviene de una luz asociada al sensor de medición montado en una de las ruedas contiguas a la rueda en la que hay montado otro sensor de medición.
La letra de referencia f indica la distancia medida en el eje 310 entre el dispositivo óptico 320 y el sensor de imagen lineal 330, que se corresponde con la distancia focal en el caso de un dispositivo óptico 320 constituido por una lente. La letra de referencia d indica la distancia desde el origen 331 de la escala de distancias definida por el sensor de imagen lineal 330, la letra griega de referencia α indica el ángulo medido que se encuentra entre el eje 310 y la dirección del haz de luz 340. Un dispositivo de medición que aplica esta configuración de medición óptica para medir ángulos también se conoce como goniómetro. Para obtener más información sobre las funcionalidades de medición de ángulos ópticos 300 y cómo funciona, se hace referencia al documento EP-A2-1 258 701 «A process for reading fractions of an interval between contiguous photo-sensitive elements in a linear optical sensor»
La forma habitual de realizar la alineación (de ruedas) en vehículos de múltiples ejes es con cuatro cabezales de alineación, que son, por ejemplo, los cabezales de alineación de tipo sensor–CCD descritos anteriormente que incluyen un total de seis u ocho sensores ópticos. Estos cuatro cabezales de alineación se acoplan a cuatro ruedas de dos ejes diferentes, que entonces se pueden alinear. Para cada eje siguiente de un vehículo con más de dos ejes, un conjunto o par de dos cabezales de alineación se mueve de un eje a otro para ser alineado. Por tanto, todo el proceso de alineación se realiza paso a paso, es decir, eje por eje. Este procedimiento es conocido y, por ejemplo, se describe normalmente en manuales de usuario de equipamientos de alineación de ruedas de camiones más avanzados.
En referencia a la figura 4a y la 4b, se describirán las etapas de un procedimiento de alineación convencional mediante el siguiente ejemplo. Por consiguiente, las seis ruedas 431, 432, 434, 435, 436 de un camión 400 con tres ejes 411, 412, 412 deben medirse y alinearse respectivamente, si es necesario. En primer lugar, en la figura 4a, en el tándem constituido por los dos ejes traseros 411, 412, el eje más trasero (a menudo no ajustable) 411 se selecciona como el eje de referencia 410. Después, un primer conjunto (par) de cabezales de alineación 421, 422 se monta en las ruedas 431, 432 en las ruedas 433, 434 del eje de referencia 410. Ahora, el ángulo de tope del eje de referencia se mide y, si es posible, se corrige (no se ilustre en las figuras). En este punto, el eje de dirección 413 se puede alinear con este eje de referencia 410. Los datos requeridos para la alineación del eje de dirección 413 con el eje de referencia 410 se recogen en correlación con los ángulos medidos por los goniómetros correspondientes de todos los sensores de medición 441, 442, 443, 444, 445, 446 montados en las cuatro ruedas 431, 432, 433, 434 del camión 400. También hay que indicar que algunos datos de alineación, p. ej., para determinar la caída, también se deben medir con sensores diferentes o adicionales, como sensores de inclinación magnetorresistente.
Con tal propósito, la medición de haces de luz se transmite en las trayectorias de luz 451 y 452, respectivamente, entre los cabezales de alineación 423 y 421, así como entre los cabezales de alineación 424 y 425, y en la trayectoria de luz 453 entre los sensores 445 y 446. Para obtener más detalles... [Seguir leyendo]
Reivindicaciones:
1. Cabezal de alineación de ruedas intermedio (210; 561, 562; 561, 562, 563, 564) para utilizar en un servicio de alineación de ruedas para un vehículo (500; 501) teniendo al menos tres ejes (511, 512, 513; 511, 512, 513, 514), de los cuales uno es un eje delantero (513), uno es un eje trasero (511) y al menos uno es un eje intermedio (512; 512, 514), dicho cabezal de alineación de ruedas intermedio (210; 561, 562; 561, 562, 563, 564)
- pudiendo acoplarse a una rueda (231; 535, 536, 535, 536, 537, 538) del vehículo (500; 501),
- comprendiendo dos funcionalidades de medición de alineación dirigidas en direcciones opuestas (251, 252), en el que una primera funcionalidad de medición de alineación (241; 571, 573; 571, 573, 575, 577) está dirigida en una primera dirección (251) hacia el eje delantero (513), y una segunda funcionalidad de medición de alineación (242; 572, 574; 572, 574, 576, 578) está dirigida en una segunda dirección (252) hacia el eje trasero (511),
caracterizado por el hecho de que dicho cabezal de alineación de ruedas intermedio (210; 561, 562; 561, 562, 563, 564) está
- destinado a acoplarse a una rueda (231; 535, 536; 535, 536, 537, 538) de al menos un eje intermedio (512; 512, 514), y
- configurado para interactuar al mismo tiempo con dos otros cabezales de alineación de ruedas acoplados al eje delantero (513), el eje trasero (511) u otro eje intermedio (512; 512, 514) mediante la primera funcionalidad de medición de alineación (571, 573; 571, 573, 575, 577) y la segunda funcionalidad de medición de alineación (572, 574; 572, 574, 576, 578), en el que cada una de dichas primera funcionalidad de medición de alineación (241; 571, 573; 571, 573, 575, 577) y segunda funcionalidad de medición de alineación (242; 572, 574; 572, 574, 576, 578) comprenden al menos sensores ópticos configurados para funcionar como un goniómetro y medios emisores de haces de luz para emitir un haz de luz en dicha dirección respectiva, para que la primera funcionalidad de medición de alineación (571, 573; 571, 573, 575, 577) puede interactuar con un primer cabezal de alineación de ruedas (521, 522; 521, 522, 563, 564) acoplado a un eje (513; 513, 514) adyacente al al menos un eje intermedio en dirección de dicho eje delantero (513) y la segunda funcionalidad de medición de alineación (572, 574; 572, 574, 576, 578) puede interactuar con un segundo cabezal de alineación de ruedas (523a, 524a; 523b, 524b; 523a, 524a, 561, 562) acoplado a un eje (511; 511; 512) adyacente al al menos un eje intermedio en dirección del eje trasero (511).
2. Sistema de medición para realizar alineación de ruedas en vehículos (500; 501) teniendo tres o más ejes (511, 512, 513; 511, 512, 513, 514), de los cuales uno es un eje delantero (513), uno es un eje trasero (511) y al menos uno es un eje intermedio (512; 512, 514), dicho sistema comprendiendo cabezales de alineación de ruedas 521, 522, 523a, 524a, 561, 562; 521, 522, 523b, 524b, 561, 562; 521, 522, 523a, 524a, 561, 562, 563, 564) que pueden acoplarse a ruedas (531, 532, 533, 534, 535, 536; 531, 532, 533, 534, 535, 536, 537, 538) de dicho vehículo (500, 501), de las que los cabezales de alineación intermedios (561, 562; 561, 562, 563, 564) que se pueden acoplar al al menos un eje intermedio (512; 512, 514) son según la reivindicación 1.
3. Sistema según la reivindicación 2, en el que dos cabezales de alineación (521, 5229 que pueden acoplarse al eje delantero (513) y/o dos cabezales de alineación de ruedas (523b, 524b) que se pueden acoplar al eje trasero (511) comprenden dos sensores ópticos adicionales (541 a 548) que se pueden adaptar para medir mediante una trayectoria de medición adicional respectivo (553, 556) entre los dos cabezales de alineación de ruedas respectivos (521, 522) cuando están acoplados al eje delantero (513) y entre los dos cabezales de alineación de ruedas respectivos (523b, 524b) cuando están acoplados al eje trasero (511), respectivamente.
4. Sistema según la reivindicación 3, en el que el sistema comprende los dos cabezales de alineación (521, 522) que se pueden acoplar al eje delantero (513) y los dos cabezales de alineación de ruedas (523b, 524b) que se pueden acoplar al eje trasero (511), cada uno comprendiendo los dos sensores ópticos adicionales (541 a 548) que se pueden adaptar para medir mediante la trayectoria de medición adicional respectiva (553, 556) de tal modo que el sistema es un sistema de alimentación cerrado de 360 grados.
5. Sistema según cualquiera de las reivindicaciones 2 a 4, en el que dicho vehículo comprende un tractor y un ténder y dicho eje delantero está en dicho tractor y dicho eje trasero está en dicho ténder.
6. Procedimiento para la alineación total de ruedas de vehículos que tienen tres o más ejes (511, 512, 513), de los cuales uno es un eje delantero (513), uno es un eje trasero (511) y al menos uno es un eje intermedio (512), dicho procedimiento comprendiendo las etapas de:
- seleccionar un eje de referencia (510) de los ejes (511, 512, 513);
- montar cabezales de alineación de ruedas (521, 522; 523a, 524a; 523b, 524b) en dicho eje delantero (513) y dicho
eje trasero (511); 5
- montar al menos un cabezal de alineación de ruedas (561, 562; 563, 564) según cualquiera de las reivindicaciones 1 ó 2 en dicho al menos un eje intermedio (512);
- realizar la alineación de dicho eje delantero (513) en el eje de referencia (510); y 10
- realizar la alineación de dicho eje intermedio (512) en el eje de referencia (510), en la alineación de dicho eje delantero (513) y de dicho al menos un eje intermedio (512) se realiza al mismo tiempo sin tener que mover ningún cabezal de alineación (521, 522; 523a, 524a; 523b, 524b; 561, 562; 563, 564) de un eje (511, 512, 513) del vehículo a otro eje (511, 512, 513).
Patentes similares o relacionadas:
APARATO DE ALINEACIÓN DE RUEDAS EN 3D SIN CONTACTO, SISTEMA Y PROCEDIMIENTO DEL MISMO, del 2 de Noviembre de 2011, de SNAP-ON EQUIPMENT SRL A UNICO SOCIO.: Aparato de medición de la alineación para medir la alineación sin contacto de una rueda de vehículo, comprendiendo el aparato: un soporte en el que […]
 PROCEDIMIENTO PARA DETERMINAR EL EJE DE GIRO DE UNA RUEDA DE VEHICULO, del 1 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para determinar el eje de giro de una rueda de vehículo , en el que durante el giro de la rueda es proyectado un dibujo luminoso , al menos, […]
PROCEDIMIENTO PARA DETERMINAR EL EJE DE GIRO DE UNA RUEDA DE VEHICULO, del 1 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para determinar el eje de giro de una rueda de vehículo , en el que durante el giro de la rueda es proyectado un dibujo luminoso , al menos, […]
 DISPOSITIVO PARA MEDIR LOS PARAMETROS DE POSICION CARACTERISTICOS DE UN VEHICULO, del 23 de Marzo de 2010, de CORGHI S.P.A.: Sistema para medir los parámetros de posición característicos de un vehículo , que comprende por lo menos una cámara de vídeo (21, 22, 31, […]
DISPOSITIVO PARA MEDIR LOS PARAMETROS DE POSICION CARACTERISTICOS DE UN VEHICULO, del 23 de Marzo de 2010, de CORGHI S.P.A.: Sistema para medir los parámetros de posición característicos de un vehículo , que comprende por lo menos una cámara de vídeo (21, 22, 31, […]
Sistema y método relacionado para determinar la alineación de rueda de vehículo, del 12 de Abril de 2019, de Space S.r.L. Con Unico Socio: Un sistema (1; 1') para determinar la orientación de al menos una primera rueda de un vehículo , incluyendo: - al menos un primer objetivo (5; 5') configurado para […]
Sistema para determinar la orientación de al menos dos ruedas de un vehículo con un dispositivo de detección, y método para calibrar el dispositivo de detección, del 13 de Marzo de 2019, de Space S.r.L. Con Unico Socio: Un sistema para determinar la orientación de al menos una primera rueda y una segunda rueda de un vehículo bajo examen en una zona […]
Un dispositivo y un método para verificar un comportamiento de un vehículo, del 22 de Noviembre de 2017, de NEXION S.p.A: Un dispositivo para verificar un comportamiento de un vehículo , que comprende al menos un instrumento de medición para medir el valor de al menos […]
Dispositivo y procedimiento para determinar y ajustar la geometría de chasis de un vehículo, del 14 de Junio de 2017, de Dürr Assembly Products GmbH: Procedimiento para determinar y ajustar la geometría de chasis de un vehículo, que comprende los siguientes pasos de procedimiento: 1. la aplicación de una balanza […]
Mueble auxiliar para la alineación de la dirección de un vehículo, del 25 de Mayo de 2016, de NOROTO SAU: Mueble auxiliar para la alineación de la dirección de un vehículo, estando el vehículo colocado sobre una plataforma elevadora, comprendiendo el mueble auxiliar un poste […]