PROCEDIMIENTO PARA DETERMINAR EL EJE DE GIRO DE UNA RUEDA DE VEHICULO.
Procedimiento para determinar el eje de giro de una rueda de vehículo (2),
en el que durante el giro de la rueda (2) es proyectado un dibujo luminoso (15), al menos, sobre la rueda (2) y el dibujo luminoso (15'', 15'''') reflejado por la rueda (2) es registrado por un sistema sensor formador de imágenes calibrado y valorado en un dispositivo de valoración, caracterizado porque durante la valoración es determinada una acumulación de puntos 3D con relación a la rueda (20) y que a ésta se adecua un modelo de superficie paramétrico de la rueda (2), porque para obtener los ejes de las ruedas (22) se calculan vectores normales de las ruedas para diferentes posiciones de giro de la rueda (2) y porque del movimiento espacial del vector normal de la rueda (22) se calcula el vector de eje de giro como eje de giro (24)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2007/060018.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20,70442 STUTTGART.
Inventor/es: KNOLL, CHRISTIAN, ABRAHAM,STEFFEN, HAJA,ANDREAS, KALLMANN,ULRICH, HAPPOLD,WALTER.
Fecha de Publicación: .
Fecha Concesión Europea: 17 de Febrero de 2010.
Clasificación Internacional de Patentes:
- G01B11/275B
Clasificación PCT:
- G01B11/275 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para ensayar la alineación de ruedas.
Fragmento de la descripción:
Procedimiento para determinar el eje de giro de una rueda de vehículo.
Estado actual del arte
La presente invención hace referencia a un Procedimiento para determinar el eje de giro de una rueda de vehículo en el que durante el giro de la rueda es proyectado, al menos, un dibujo luminoso sobre la rueda y el dibujo luminoso reflejado por la rueda es registrado por un sistema sensor formador de imágenes calibrado y valorado en un dispositivo de valoración.
Un procedimiento y un dispositivo correspondiente de este tipo se indica en la memoria US 4,745,469, en donde sobre la base del eje de giro determinado se realiza una medición de eje, especialmente se determinan el ángulo de convergencia y el ángulo de inclinación, mientras el vehículo se encuentra sobre un banco de rodillos. Mediante un sistema de proyección se proyectan líneas láser u otros dibujos sobre la rueda o el neumático. Mediante cámaras se representan los dibujos y a través de una triangulación, a partir de las coordenadas de la cámara y la disposición conocida de las cámaras con relación al proyector, las coordenadas 3D son reconstruidas sobre la superficie y a partir de ello se determina la posición de la rueda, de la cual se determina finalmente la huella y la inclinación. Esta medición óptica sin contacto, se realiza mientras la rueda gira en el lugar alrededor de su eje de giro en el banco de rodillos.
También en la memoria DE 103 35 829 A1 se indica un procedimiento para determinar la geometría del eje en el que un dibujo luminoso es proyectado desde el lado frontal sobre la rueda, y la luz proyectada desde el lado frontal de la rueda es registrada por el transformador de imagen desde otra dirección diferente a la dirección de proyección, con lo que se encuentran previstas una proyección superficial de la luz y un registro superficial de la luz reflejada por la rueda durante el giro de la rueda, para determinar de una manera lo más precisa y robusta posible el vector normal de la rueda o un plano de referencia, a pesar de irregularidades usuales existentes en ruedas. La determinación del plano de referencia o del vector normal relacionado con el mismo tiene lugar en la rueda que gira y que realiza, al menos, un giro completo. Como dibujo luminoso proyectado se utiliza, por ejemplo, un modelo de rayas, una estructura de enrejado monocromática o un dibujo bidimensional a color.
También en el documento DE 10 2005 063 082 A1 y el documento DE 10 2005 063 083 A1 se indican procedimientos para la medición óptica del chasis en los que se proyecta luz estructurada sobre la rueda y también sobre el área de carrocería que la rodea, y se registra mediante un sistema sensor formador de imágenes.
En otros procedimientos y dispositivos para la determinación del eje de giro y la medición de la geometría de ejes, el vehículo es observado con un sistema de cámara mono o estéreo, como se muestra, por ejemplo, en la memoria EP 0 895 056 A2 y la DE 29 48 573 A1. En la imagen de medio tono de la representación de la cámara se localizan características destacadas, como por ejemplo el borde de la llanta. A partir de la posición geométrica del borde de la llanta u otras características de la imagen se calcula su posición en el espacio y, con ello, la huella o inclinación. Un procedimiento de medición de este tipo también es ejecutado en la memoria DE 10 2004 013 441 A1, con lo que para la determinación del eje de rotación de la rueda se adecua un modelo 3D. Durante la medición se registran, por ejemplo, también imágenes estéreo de la llanta de la rueda y se determina la posición angular de la válvula. En la memoria (no prepublicada) DE 10 2005 017 624.0 se explica como obtener características de la rueda y/o características de la carrocería a través de la determinación de una acumulación de puntos 3D, para determinar a partir de esto la geometría de la rueda y/o de ejes de vehículos, con lo que los registros de la rueda en rotación tienen lugar, especialmente, también durante el paso del vehículo.
También existen procedimientos en los que en lugar de características de ruedas existentes se aplican marcaciones especiales con medios auxiliares mecánicos, como se muestra, por ejemplo, en la memoria DE 100 32 356 A1. Este tipo de marcaciones dan como resultado estructuras en la rueda que pueden ser bien capturadas para la medición y la valoración, pero sin embargo requieren de un coste adicional.
La memoria WO-A-2005 090 906 describe un procedimiento para determinar el eje de giro de una rueda de un vehículo, en el que la rueda iluminada de manera uniforme es registrada por una cámara mientras gira. Durante la valoración, la acumulación de puntos registrada por la cámara es adecuada a un modelo de superficie paramétrico de la rueda. A partir de ello es calculado el vector normal de la rueda para diferentes posiciones de giro de la rueda, y sobre la base de estos vectores normales se determina el eje de giro de la rueda.
En cambio, en los procedimientos y dispositivos conocidos hasta el momento sin marcaciones especiales o con luz proyectada es difícil obtener mediciones exactas y fiables, robustas de la geometría del eje o la rueda y del eje de giro de un vehículo, especialmente en las duras condiciones de medición de un lugar de pruebas de un taller y bajo la obligación de una ejecución, en lo posible, sencilla.
Es objeto de la presente invención proporcionar para su disposición un procedimiento para determinar el eje de giro de una rueda de un vehículo y, a partir de ello, eventualmente la geometría del eje o la rueda, con el que se obtengan valores de medición en lo posible exactos, fiables con el menor coste posible.
Exposición de la invención
Esta tarea es resuelta con las características de la reivindicación 1. Para ello se prevé que durante la valoración sea determinada una acumulación de puntos 3D con relación a la rueda y que a ésta se adecue un modelo de superficie paramétrico de la rueda, que para obtener los ejes de las ruedas se calculen vectores normales de las ruedas para diferentes posiciones de giro de la rueda, y que del movimiento espacial del vector normal de la rueda se calcule el vector de eje de giro como eje de giro. Con la iluminación estructurada de la rueda provocada por la proyección de los dibujos luminosos y la valoración por medio de una acumulación de puntos 3D y la adecuación de un modelo de superficie paramétrico de la rueda se pueden determinar los vectores normales de la rueda durante el giro de la misma, sin costosas estructuras mecánicas de medición y con una realización simple de la medición, y a partir de ello se puede determinar el eje de giro. Sobre la base del eje de giro determinado se pueden obtener, de forma exacta y fiable, especialmente los datos de geometría del eje o de la rueda.
Diseños ventajosos del procedimiento consisten en que el dibujo luminoso reflejado es registrado a través de un sistema de cámara mono, estéreo o múltiple del sistema sensor formador de imágenes, y que en el caso del registro estéreo tiene lugar una asignación de correspondencia de los puntos de medición obtenidos con ambas imágenes de cámara, y a partir de la correspondencia estéreo y los datos de calibración se calculan las coordenadas 3D del respectivo punto de medición.
Una mayor precisión se obtiene en este caso porque como modelo de superficie para la compensación de la forma se toma como base un modelo deformable para la adecuación.
Contribuyen a una medición sencilla y rápida que la proyección del modelo luminoso y el registro por parte del sistema sensor formador de imágenes se realizan durante el paso del vehículo.
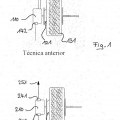
Un modo de proceder conveniente para la medición y la valoración resulta porque para múltiples posiciones de la rueda se calculan los correspondientes ejes de ruedas y adicionalmente se determinan las posiciones espaciales de los centros de las ruedas, porque los centros de las ruedas y los correspondientes ejes de las ruedas son desplazados hacia un centro común y porque el eje de giro es identificado como eje del cono o cono truncado que se genera.
Para una medición sencilla se encuentra previsto además, que el movimiento del vehículo durante el paso sea determinado tridimensionalmente a través del registro del movimiento de la carrocería.
En este caso un modo de proceder ventajoso durante del medición y la valoración consiste en que los desplazamientos de traslación de los vectores normales de las ruedas que se generan por el paso sean determinados...
Reivindicaciones:
1. Procedimiento para determinar el eje de giro de una rueda de vehículo (2), en el que durante el giro de la rueda (2) es proyectado un dibujo luminoso (15), al menos, sobre la rueda (2) y el dibujo luminoso (15', 15'') reflejado por la rueda (2) es registrado por un sistema sensor formador de imágenes calibrado y valorado en un dispositivo de valoración, caracterizado porque durante la valoración es determinada una acumulación de puntos 3D con relación a la rueda (20) y que a ésta se adecua un modelo de superficie paramétrico de la rueda (2), porque para obtener los ejes de las ruedas (22) se calculan vectores normales de las ruedas para diferentes posiciones de giro de la rueda (2) y porque del movimiento espacial del vector normal de la rueda (22) se calcula el vector de eje de giro como eje de giro (24).
2. Procedimiento conforme a la reivindicación 1 caracterizado porque el dibujo luminoso reflejado (15', 15'') es registrado a través de un sistema de cámara mono, estéreo o múltiple del sistema sensor formador de imágenes y porque en el caso del registro estéreo tiene lugar una asignación de correspondencia de los puntos de medición obtenidos con ambas imágenes de cámara y a partir de la correspondencia estéreo y los datos de calibración se calculan las coordenadas 3D del respectivo punto de medición.
3. Procedimiento conforme a la reivindicación 1 o 2, caracterizado porque como modelo de superficie para la compensación de la forma se toma como base un modelo deformable para la adecuación.
4. Procedimiento conforme a una de las reivindicaciones anteriores, caracterizado porque la proyección del modelo luminoso (15) y el registro por parte del sistema sensor formador de imágenes se realizan durante el paso del vehículo.
5. Procedimiento conforme a la reivindicación 4, caracterizado porque para múltiples posiciones de la rueda se calculan los correspondientes ejes de ruedas (22) y adicionalmente se determinan las posiciones espaciales de los centros de las ruedas, porque los centros de las ruedas y los correspondientes ejes de las ruedas (22) son desplazados hacia un centro común y porque el eje de giro es identificado como eje del cono truncado que se genera.
6. Procedimiento conforme a la reivindicación 4 o 5, caracterizado porque el movimiento del vehículo durante el paso es determinado tridimensionalmente a través del registro del movimiento de la carrocería.
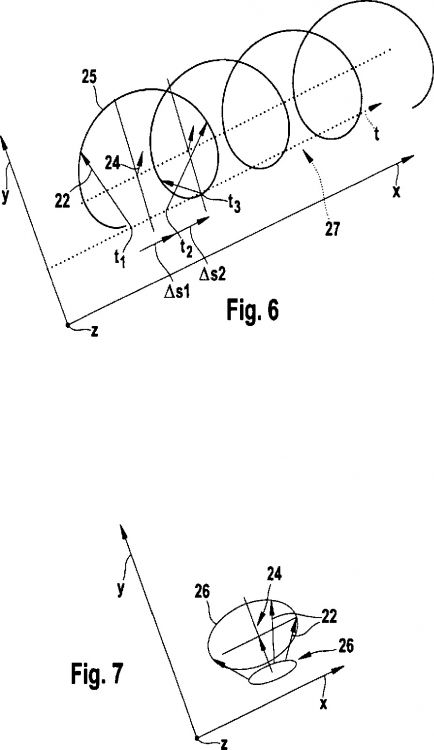
7. Procedimiento conforme a una de las reivindicaciones 4 a 6, caracterizado porque los desplazamientos de traslación de los vectores normales de las ruedas que se generan por el paso son determinados por la dirección de movimiento y la velocidad de las acumulaciones de puntos 3D adecuadas para cada imagen registrada, porque las espirales de los vectores normales de la rueda son desplazadas para juntarlas entre sí y formar una curva periférica calculando los desplazamientos de traslación y porque el vector normal respecto de la curva periférica descrito por la superficie plana por su centro es determinado como vector del eje de la rueda.
8. Procedimiento conforme a la reivindicación 7, caracterizado porque para aumentar la exactitud de la determinación de la posición de los correspondientes vectores normales de la rueda es determinada la frecuencia de giro, y por lo tanto el ángulo de giro a partir del vector de velocidad y el radio de un objeto de rueda segmentado correspondiente.
9. Procedimiento conforme a una de las reivindicaciones anteriores, caracterizado porque a partir del vector de eje de giro determinado durante el movimiento de la rueda (2) y, eventualmente, del vehículo y un valor de medición obtenido de la rueda en reposo del vector normal de la rueda se calculan el ángulo de convergencia y el ángulo de inclinación.
10. Procedimiento conforme a una de las reivindicaciones anteriores, caracterizado porque como modelo de superficie para la adecuación en la acumulación de puntos se toma como base un cilindro o una rueda idealizada.
11. Procedimiento conforme a una de las reivindicaciones anteriores de la 1 a 3 caracterizado porque una determinación de ángulo de giro tiene lugar a partir de la textura de superficie en el caso de una iluminación no estructurada.
Patentes similares o relacionadas:
APARATO DE ALINEACIÓN DE RUEDAS EN 3D SIN CONTACTO, SISTEMA Y PROCEDIMIENTO DEL MISMO, del 2 de Noviembre de 2011, de SNAP-ON EQUIPMENT SRL A UNICO SOCIO.: Aparato de medición de la alineación para medir la alineación sin contacto de una rueda de vehículo, comprendiendo el aparato: un soporte en el que […]
 PROCEDIMIENTO Y DISPOSITIVO PARA LA ALINEACIÓN DE MÚLTIPLES EJES DE UN CAMIÓN, del 29 de Junio de 2011, de SNAP-ON EQUIPMENT SRL A UNICO SOCIO.: Cabezal de alineación de ruedas intermedio para utilizar en un servicio de alineación de ruedas para un vehículo teniendo […]
PROCEDIMIENTO Y DISPOSITIVO PARA LA ALINEACIÓN DE MÚLTIPLES EJES DE UN CAMIÓN, del 29 de Junio de 2011, de SNAP-ON EQUIPMENT SRL A UNICO SOCIO.: Cabezal de alineación de ruedas intermedio para utilizar en un servicio de alineación de ruedas para un vehículo teniendo […]
 DISPOSITIVO PARA MEDIR LOS PARAMETROS DE POSICION CARACTERISTICOS DE UN VEHICULO, del 23 de Marzo de 2010, de CORGHI S.P.A.: Sistema para medir los parámetros de posición característicos de un vehículo , que comprende por lo menos una cámara de vídeo (21, 22, 31, […]
DISPOSITIVO PARA MEDIR LOS PARAMETROS DE POSICION CARACTERISTICOS DE UN VEHICULO, del 23 de Marzo de 2010, de CORGHI S.P.A.: Sistema para medir los parámetros de posición característicos de un vehículo , que comprende por lo menos una cámara de vídeo (21, 22, 31, […]
Sistema y método relacionado para determinar la alineación de rueda de vehículo, del 12 de Abril de 2019, de Space S.r.L. Con Unico Socio: Un sistema (1; 1') para determinar la orientación de al menos una primera rueda de un vehículo , incluyendo: - al menos un primer objetivo (5; 5') configurado para […]
Sistema para determinar la orientación de al menos dos ruedas de un vehículo con un dispositivo de detección, y método para calibrar el dispositivo de detección, del 13 de Marzo de 2019, de Space S.r.L. Con Unico Socio: Un sistema para determinar la orientación de al menos una primera rueda y una segunda rueda de un vehículo bajo examen en una zona […]
Un dispositivo y un método para verificar un comportamiento de un vehículo, del 22 de Noviembre de 2017, de NEXION S.p.A: Un dispositivo para verificar un comportamiento de un vehículo , que comprende al menos un instrumento de medición para medir el valor de al menos […]
Dispositivo y procedimiento para determinar y ajustar la geometría de chasis de un vehículo, del 14 de Junio de 2017, de Dürr Assembly Products GmbH: Procedimiento para determinar y ajustar la geometría de chasis de un vehículo, que comprende los siguientes pasos de procedimiento: 1. la aplicación de una balanza […]
Mueble auxiliar para la alineación de la dirección de un vehículo, del 25 de Mayo de 2016, de NOROTO SAU: Mueble auxiliar para la alineación de la dirección de un vehículo, estando el vehículo colocado sobre una plataforma elevadora, comprendiendo el mueble auxiliar un poste […]