APARATO DE ALINEACIÓN DE RUEDAS EN 3D SIN CONTACTO, SISTEMA Y PROCEDIMIENTO DEL MISMO.
Aparato de medición de la alineación para medir la alineación sin contacto de una rueda de vehículo,
comprendiendo el aparato: un soporte en el que está montado de forma giratoria un portador alrededor de un punto de rotación; al menos una unidad de medición montada en el portador de tal modo que la unidad de medición tiene una posición geométrica definida y está configurada para medir datos de la distancia de un punto de medición en la rueda, cuya alineación se va a medir, desde la unidad de medición respectiva en un modo sin contacto, en el que la unidad de medición puede girar alrededor de un eje, paralela a un plano de referencia correspondiente a un plano de rotación del dispositivo portador alrededor del punto de montaje y ortogonal a un radio desde el punto de rotación hasta la unidad de medición; medio de control configurado para controlar la rotación del dispositivo portador y para pivotar la al menos una unidad de medición de tal modo que al menos una unidad de medición se puede dirigir hacia un punto de medición en la superficie de la rueda, cuya alineación se va a medir; y medios de procesamiento configurados para calcular los datos de alineación de la rueda a partir de los datos de distancia tomados en al menos tres puntos de medición junto con la posición geométrica respectiva y un ángulo de pivote respectivo de la al menos una unidad de medición respectiva, y un ángulo de rotación respectivo del portador
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06007521.
G01B11/275FISICA. › G01METROLOGIA; ENSAYOS. › G01BMEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para ensayar la alineación de ruedas.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
[0001] La invención se refiere a un aparato de medición de la alineación para medir sin contacto la alineación de una rueda de vehículo según las reivindicaciones independientes 1 y 5, un sistema de medición de la alineación según la reivindicación independiente 14, y un procedimiento de medición de la alineación según la reivindicación independiente 19. ANTECEDENTES DE LA INVENCIÓN [0002] La presente invención se refiere más específicamente a un dispositivo para medir la alineación para ruedas de un vehículo de automoción o similar, mediante el cual los ángulos de inclinación, en particular el ángulo de convergencia interior y la caída, de una rueda montada a través de la suspensión del vehículo se mide sin contacto, principalmente mediante medición de distancia sin contacto con la rueda estática (no gira). [0003] En esta solicitud, el término rueda debería entenderse como que incluye el cubo, los radios o disco de la rueda, y la llanta, en particular el reborde de la llanta también denominado talón de la llanta, en el que el extremo forma el borde entre el neumático montado. Una rueda puede estar hecha de material adaptable, hoy en día mayoritariamente una aleación de aluminio. La parte de la rueda sobre la que el neumático está montado es la llanta y los bordes de la llanta, que evitan que el neumático se salga de la llanta y el talón de la llanta. La parte media de la rueda, que normalmente está montada en el eje del vehículo, es el cubo de la rueda. La porción entre el cubo y la llanta pueden ser radios o el disco de la rueda; al área donde un radio se une con la llanta es la base del radio. En este contexto, un vehículo de automoción puede ser generalmente un vehículo a motor, una motocicleta, un coche, un camión, o incluso un avión, cuyo tren de aterrizaje también tiene ruedas. En otras palabras, cualquier tipo de objeto con ruedas de giro, cuyas ruedas pueden estar sujetas al procedimiento o aparato de la presente solicitud. El neumático montado en la rueda a menudo también se considera como parte del vehículo, pero con el fin de ajustar la alineación de las ruedas en el vehículo de automoción o similar, la medición de la alineación de la propia rueda es más fiable, ya que un neumático puede tener irregularidades. [0004] Según un aspecto general, la correcta alineación de las ruedas de vehículos de automoción requiere la medición de los ángulos de inclinación respectivos que indican la posición de montaje respectiva de las ruedas unas respecto a las otras y el vehículo de automoción. En este contexto, el ángulo de convergencia interior es el ángulo de inclinación de la rueda o la superficie del neumático respecto a la dirección de progreso del vehículo, el ángulo de caída es el grado de inclinación de la superficie del neumático o rueda respecto al plano vertical, y el avance es el ángulo entre la vertical en el centro de la rueda y la inclinación del eje del pivote de dirección visto directamente desde los lados de la rueda. Una medición precisa y un ajuste correcto de la alineación de la rueda, incluyendo todos estos ángulos es un factor importante para mejorar las características de dirección del vehículo respectivo, concretamente en relación con el desgaste del neumático. [0005] El ángulo de convergencia interna indica si los neumáticos están ensanchados en la parte delantera o trasera visto desde el cuerpo del vehículo y afecta a las ruedas delanteras y traseras. Si las ruedas están ensanchadas en la parte delantera, se llama convergencia externa, y si las ruedas están ensanchadas en la parte trasera, se denomina convergencia interna. El ángulo de caída indica si la rueda está ensanchada en la parte superior o la inferior visto desde la parte delantera o trasera directa del vehículo, y representa el ángulo formado por el punto de contacto con el suelo normal del neumático y una línea recta a lo largo del vehículo. Cuando el neumático es perpendicular al suelo, la caída es cero; cuando el neumático está inclinado hacia dentro, la caída es negativa; y el neumático inclinado hacia fuera es una caída positiva. El ángulo de caída se mide con el fin de facilitar la dirección, reduciendo la carga vertical y evitando que la rueda se ensanche en la parte inferior. Un avance positivo ocurre cuando el eje del pivote de dirección está inclinado hacia atrás, un avance negativo ocurre cuando el eje del pivote de dirección está inclinado hacia delante, y un avance cero ocurre cuando el eje del pivote de dirección está en una posición vertical. El avance es necesario para mantener la estabilidad en línea recta. DESCRIPCIÓN DE LA TÉCNICA RELACIONADA ES 2 367 366 T3 [0006] US 6.862.544 B1 describe un dispositivo y un procedimiento para medir las características de alineación de ruedas de un vehículo, y en particular para medir la caída y la convergencia, utiliza un sensor de imagen rotativo como un sensor láser para dibujar una porción del neumático y/o la llanta del vehículo, permitiendo la determinación de la caída y la convergencia de la rueda sin girarla. [0007] EP 0 766 064 describe un procedimiento y un aparato para evaluar sin contacto la alineación de ruedas de vehículos que utiliza localizadores de señales de tipo láser montados en ubicaciones entre las que se coloca el vehículo para ser probado. Los localizadores de señales en tres ubicaciones de la rueda permite determinar la posición de la rueda. Las ubicaciones se eligen de tal modo que la localización de las señales se lleva a cabo donde se produce un contorno significativo en el ensamblado de la rueda, permitiendo de este modo obtener una señal clara y característica desde un aparato relativamente sencillo. 2 [0008] La patente de EE.UU. 6.657.711 describe un aparato para medir las características dinámicas de la alineación de ruedas de vehículo sin contacto. Una fuente de luz láser emite un haz de láser con un patrón geométrico determinado hacia la superficie lateral de la rueda. Un dispositivo de control del haz de láser controla la anchura del haz de láser de tal modo que es radiado solo en un rango predeterminado de la superficie lateral de la rueda, en particular se utilizan dos luces láser que emiten haces de láser no paralelos. Un dispositivo e detección de foto recibe el patrón geométrico en la superficie lateral de la rueda de los dos haces láser y lo convierte en dos datos de imágenes correspondientes. Una unidad de procesamiento calcula la distancia entre las dos imágenes basándose en los dos datos de imágenes y calcula la alineación de la rueda basándose en la misma distancia. [0009] Sin embargo, el aparato de medición sin contacto de la técnica anterior es muy complejo y requiere muchas partes móviles electrónicas y optomecánicas, así como medios ópticos para producir haces láser con cierto patrón geométrico, medios respectivos para controlar el haz láser, y dispositivos como un obturador de cristal líquido, un micro espejo de silicona, o un obturador Estas partes o dispositivos son muy propensas a dañarse y/o a ajustarse incorrectamente debido a un entorno inadecuado o un garaje o tienda de automóviles. Además, al aparato de la técnica anterior requiere la rotación de las ruedas, que no es solo otro requisito técnico sino también implica unas mediciones especiales para prevenir accidentes. RESUMEN DE LA INVENCIÓN ES 2 367 366 T3 [0007] El objeto de la invención es proporcionar un procedimiento y un aparato del tipo expuesto en la primer parte de esta especificación, con el que la alineación de la rueda el vehículo se pueda determinar de forma sencilla. En particular, un aparato para medir la alineación debería poder utilizarse en una variedad de diferentes ruedas de vehículos de automoción, en relación con el diseño y el tamaño, para medir y ajustar la alineación de la rueda con mucha precisión. Además, el aparato no debería necesitar mantenimiento en un largo período de tiempo, hecho que requiere que sea mecánicamente robusto y sencillo para acoplarse al complicado entorno de un garaje o tienda de automóviles. [0011] Según la invención, respecto al aparato, ese objeto se logra mediante las características de la reivindicación 1 y 5, y respecto al sistema, se logra mediante las características de la reivindicación 14, y respecto al procedimiento, se logra mediante las características de la reivindicación 19. [0012] Según una primera realización, un aparato de medición de la alineación para medir sin contacto la alineación de una rueda de vehículo comprende un soporte en el que se monta de forma giratoria un portador alrededor de un punto de rotación; al menos una unidad de medición montada en el portador de tal modo que la unidad de medición tiene una posición geométrica definida y está configurada para medir datos de la distancia... [Seguir leyendo]
Reivindicaciones:
1. Aparato de medición de la alineación para medir la alineación sin contacto de una rueda de vehículo, comprendiendo el aparato: un soporte en el que está montado de forma giratoria un portador alrededor de un punto de rotación; al menos una unidad de medición montada en el portador de tal modo que la unidad de medición tiene una posición geométrica definida y está configurada para medir datos de la distancia de un punto de medición en la rueda, cuya alineación se va a medir, desde la unidad de medición respectiva en un modo sin contacto, en el que la unidad de medición puede girar alrededor de un eje, paralela a un plano de referencia correspondiente a un plano de rotación del dispositivo portador alrededor del punto de montaje y ortogonal a un radio desde el punto de rotación hasta la unidad de medición; medio de control configurado para controlar la rotación del dispositivo portador y para pivotar la al menos una unidad de medición de tal modo que al menos una unidad de medición se puede dirigir hacia un punto de medición en la superficie de la rueda, cuya alineación se va a medir; y medios de procesamiento configurados para calcular los datos de alineación de la rueda a partir de los datos de distancia tomados en al menos tres puntos de medición junto con la posición geométrica respectiva y un ángulo de pivote respectivo de la al menos una unidad de medición respectiva, y un ángulo de rotación respectivo del portador. 2. Aparato según la reivindicación 1, en el que el aparato comprende un medio de pivote de portador controlable en el soporte en el que el portador está montado de forma utilizable, estando el medio de pivote dispuesto de tal forma que el ángulo de pivote respectivo puede determinarse directamente desde un pivote controlado del portador. 3. Aparato según la reivindicación 2, en el que el medio de pivote del portador es un motor paso a paso que tiene al menos una posición de pivote predeterminada como posición de referencia para el ángulo de pivote respectivo. 4. Aparato según la reivindicación 2, en el que el medio de pivote del portador es un motor provisto de un medio sensor del pivote que está configurado para medir un ángulo de pivote real del portador. 5. Aparato para medir de la alineación sin contacto de una rueda de vehículo (200), comprendiendo el aparato: al menos tres unidades de medición (10, 20, 30) dispuestas en un portador (100) de tal modo que sus posiciones geométricas definen un plano de referencia, estando cada unidad de medición (10, 20, 30) configurada para medir los datos de distancia de un punto de medición respectivo (212) ubicad en la rueda (200), cuya alineación se va a medir, desde la unidad de medición respectiva (10) en un modo sin contacto; un soporte (120) en el que está montado el portador (100) en un punto de montaje, en el que cada unidad de medición (10, 20, 30) puede pivotar alrededor de un eje respectivo (15), siendo paralelo al plano de referencia y ortogonal a un radio (R) desde un centro geométrico (101) de las posiciones geométrica de las al menos tres unidades de medición; y medio de control configurado para controlar la rotación de cada unidad de medición (10, 20, 30) de tal modo que las unidades de medición se pueden dirigir hacia puntos de medición respectivos (200) ubicados en la superficie de la rueda, cuya alineación se va a medir; y medios de procesamiento configurados para calcular los datos de alineación de la rueda a partir de los datos de distancia tomados en los al menos tres puntos de medición junto con la posición geométrica respectiva y un ángulo de pivote respectivo de la unidad de medición respectiva. 6. Aparato según cualquiera de las reivindicaciones anteriores, en el que cada unidad de medición (10, 20, 30) comprende un dispositivo de óptico de triangulación-medición (11, 12). 7. Aparato según cualquiera de las reivindicaciones anteriores, en el que la unidad de medición (10, 20, 30) comprende un medio de pivote dispuesto de tal modo que se puede determinar el ángulo de pivote respectivo. 8. Aparato según la reivindicación 5, en el que el medio de pivote es un motor paso a paso que tiene al menos una posición de pivote predeterminada como posición de referencia para el ángulo de pivote respectivo. 9. Aparato según cualquiera de las reivindicaciones anteriores, en el que el aparato comprende tres unidades de medición (10, 20, 30), que están dispuestas entre sí respecto a un punto de referencia (101) en el plano de referencia de tal modo que dos unidades de medición adyacentes respectivas están separadas por un ángulo de 120 grados. 10. Aparato según cualquiera de las reivindicaciones anteriores, en el que el medio de control está configurado para controlar el pivote de la al menos una unidad de medición (10, 20, 30) de modo que los datos de medición producidos por la unidad de medición durante el pivote pueden ser evaluados por el medio de procesamiento para detectar los puntos de medición en la superficie de la llanta (202) de la rueda (200) correspondiente al talón (210) de la llanta (202). 8 ES 2 367 366 T3 11. Aparato según cualquiera de las reivindicaciones anteriores, en el que el soporte (120) es un caballete (120) y el portador (100) está montado en el caballete (120) de tal modo que el plano de referencia es substancialmente ortogonal a una huella (125) del caballete (120). 12. Aparato según cualquiera de las reivindicaciones anteriores, en el que el medio de control está configurado para realizar el ajuste continuo del pivote de una unidad de medición (10, 20, 30), de tal modo que se mantiene el punto de medición respectivo en la superficie de la llanta (202) de la rueda (200) en el talón (210) de la llanta (202). 13. Aparato según cualquiera de las reivindicaciones anteriores, en el que el aparato (401, 402, 403, 404) comprende además al menos dos unidades adicionales de medición del ángulo óptico (411, 412, 421, 422, 431, 432, 441, 442) configuradas para rastrear una orientación relativa del aparato (401, 402, 403, 404) respecto a al menos otro aparato adyacente. 14. Sistema de medición de la alineación para alinear sin contacto la rueda de un vehículo de automoción, comprendiendo el sistema al menos cuatro aparatos de alineación (301, 302, 303, 304; 401, 402, 403, 404) según cualquiera de las reivindicaciones 1 a 12. 15. Sistema según la reivindicación 14, en el que los aparatos de alineación (301, 302, 303, 304) están montados de forma móvil en el elevador para subir un vehículo de automoción cuyas ruedas se van ajustar, en el que los aparatos de alineación están montados de forma móvil en los lados del elevador de tal modo que se puede ajustar la posición a las posición de las ruedas de un vehículo en el elevador. 16. Sistema según la reivindicación 14 ó 15, en el que los aparatos de alineación del sistema están conectados a un dispositivo de procesamiento central configurado para calcular los ángulos de inclinación respectivos de cada rueda necesarios para alinear las ruedas totalmente respecto a los ángulos de referencia predeterminados. 17. Sistema según cualquiera de las reivindicaciones 14 a 16, en el que el aparato de medición de la alineación comprende además al menos dos unidades adicionales de medición (411, 412, 421, 422, 431, 432, 441, 442) configuradas para rastrear una orientación relativa del aparato respectivo (401, 402, 403, 404) respecto al otro aparato (401, 402, 403, 404) del sistema. 18. Aparato de medición de la alineación para determinar la alineación de una rueda de vehículo a motor, comprendiendo las etapas de: controlar un dispositivo de medición sin contacto para detectar al menos tres puntos de medición diferentes en el talón de la llanta de la rueda y medir respectivamente una distancia y un ángulo desde el dispositivo de medición hasta el punto de medición respectivo; y calcular la alineación de la rueda de vehículo a partir de las distancias y los ángulos de al menos tres puntos de medición diferentes. 19. Procedimiento según la reivindicación 18, en el que el control del dispositivo de medición sin contacto comprende una medición continua de una distancia de un punto de medición en la llanta de la rueda para proporcionar los datos de alineación a tiempo real durante la operación de alineación. 20. Procedimiento según la reivindicación 18 ó 19, en el que el control del dispositivo de medición sin contacto comprende además una etapa para realizar periódicamente rápidas exploraciones de la llanta durante la medición continua de la distancia del punto de medición, de tal modo que se puede mantener la ubicación del talón de la llanta de la rueda. 21. Procedimiento según cualquiera de las reivindicaciones 18 a 20, incluyendo el cálculo de los ángulo de inclinación respectivos de cada ruedas requeridos para una alineación de ruedas total respecto a los ángulos de referencia predeterminados. 22. Procedimiento según cualquiera de las reivindicaciones 18 a 20, incluyendo el rastreo sin contacto de una orientación relativa de la alineación de todas las ruedas del vehículo una respecto de la otra; y el cálculo de una alineación de rueda total de todas las ruedas del vehículo. 9 ES 2 367 366 T3 ES 2 367 366 T3 11 ES 2 367 366 T3 12
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO PARA LA ALINEACIÓN DE MÚLTIPLES EJES DE UN CAMIÓN, del 29 de Junio de 2011, de SNAP-ON EQUIPMENT SRL A UNICO SOCIO.: Cabezal de alineación de ruedas intermedio para utilizar en un servicio de alineación de ruedas para un vehículo teniendo […]
PROCEDIMIENTO PARA DETERMINAR EL EJE DE GIRO DE UNA RUEDA DE VEHICULO, del 1 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para determinar el eje de giro de una rueda de vehículo , en el que durante el giro de la rueda es proyectado un dibujo luminoso , al menos, […]
DISPOSITIVO PARA MEDIR LOS PARAMETROS DE POSICION CARACTERISTICOS DE UN VEHICULO, del 23 de Marzo de 2010, de CORGHI S.P.A.: Sistema para medir los parámetros de posición característicos de un vehículo , que comprende por lo menos una cámara de vídeo (21, 22, 31, […]
Sistema y método relacionado para determinar la alineación de rueda de vehículo, del 12 de Abril de 2019, de Space S.r.L. Con Unico Socio: Un sistema (1; 1') para determinar la orientación de al menos una primera rueda de un vehículo , incluyendo:
- al menos un primer objetivo (5; 5') configurado para […]
Sistema para determinar la orientación de al menos dos ruedas de un vehículo con un dispositivo de detección, y método para calibrar el dispositivo de detección, del 13 de Marzo de 2019, de Space S.r.L. Con Unico Socio: Un sistema para determinar la orientación de al menos una primera rueda y una segunda rueda de un vehículo bajo examen en una zona […]
Un dispositivo y un método para verificar un comportamiento de un vehículo, del 22 de Noviembre de 2017, de NEXION S.p.A: Un dispositivo para verificar un comportamiento de un vehículo , que comprende al menos un instrumento de medición para medir el valor de al menos […]
Dispositivo y procedimiento para determinar y ajustar la geometría de chasis de un vehículo, del 14 de Junio de 2017, de Dürr Assembly Products GmbH: Procedimiento para determinar y ajustar la geometría de chasis de un vehículo, que comprende los siguientes pasos de procedimiento:
1. la aplicación de una balanza […]
Mueble auxiliar para la alineación de la dirección de un vehículo, del 25 de Mayo de 2016, de NOROTO SAU: Mueble auxiliar para la alineación de la dirección de un vehículo, estando el vehículo colocado sobre una plataforma elevadora, comprendiendo el mueble auxiliar un poste […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 PROCEDIMIENTO Y DISPOSITIVO PARA LA ALINEACIÓN DE MÚLTIPLES EJES DE UN CAMIÓN, del 29 de Junio de 2011, de SNAP-ON EQUIPMENT SRL A UNICO SOCIO.: Cabezal de alineación de ruedas intermedio para utilizar en un servicio de alineación de ruedas para un vehículo teniendo […]
PROCEDIMIENTO Y DISPOSITIVO PARA LA ALINEACIÓN DE MÚLTIPLES EJES DE UN CAMIÓN, del 29 de Junio de 2011, de SNAP-ON EQUIPMENT SRL A UNICO SOCIO.: Cabezal de alineación de ruedas intermedio para utilizar en un servicio de alineación de ruedas para un vehículo teniendo […]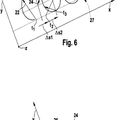 PROCEDIMIENTO PARA DETERMINAR EL EJE DE GIRO DE UNA RUEDA DE VEHICULO, del 1 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para determinar el eje de giro de una rueda de vehículo , en el que durante el giro de la rueda es proyectado un dibujo luminoso , al menos, […]
PROCEDIMIENTO PARA DETERMINAR EL EJE DE GIRO DE UNA RUEDA DE VEHICULO, del 1 de Junio de 2010, de ROBERT BOSCH GMBH: Procedimiento para determinar el eje de giro de una rueda de vehículo , en el que durante el giro de la rueda es proyectado un dibujo luminoso , al menos, […]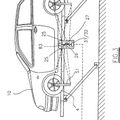 DISPOSITIVO PARA MEDIR LOS PARAMETROS DE POSICION CARACTERISTICOS DE UN VEHICULO, del 23 de Marzo de 2010, de CORGHI S.P.A.: Sistema para medir los parámetros de posición característicos de un vehículo , que comprende por lo menos una cámara de vídeo (21, 22, 31, […]
DISPOSITIVO PARA MEDIR LOS PARAMETROS DE POSICION CARACTERISTICOS DE UN VEHICULO, del 23 de Marzo de 2010, de CORGHI S.P.A.: Sistema para medir los parámetros de posición característicos de un vehículo , que comprende por lo menos una cámara de vídeo (21, 22, 31, […]