Procedimiento y aparato para la determinación de las dimensiones geométricas de una rueda de vehículo.
Procedimiento de determinación de las dimensiones geométricas de una rueda de vehículo a motor (conjunto llanta/ neumático) mediante detección sin contacto,
en el que
- al menos un haz luminoso plano (3) es emitido desde una o más posiciones determinadas sobre la rueda (1) o al menos una parte de la rueda,
- el haz luminoso se refleja en una zona de incidencia en forma de tira (4) sobre la superficie de la rueda,
- el haz reflejado se focaliza y proyecta en una zona de imagen proyectada en forma de tira sobre una superficie de detección de imágenes sensible a la luz de dos dimensiones (12) capaz d 10 e generar señales de imagen que son proporcionales a las posiciones de una pluralidad de puntos (S') de la zona de imagen proyectada,
- las señales de detección son evaluadas para determinar la forma y/o posición de la zona de incidencia en forma de tira (4) sobre la rueda (1), caracterizado por el hecho de que
- la rueda (1) se fija a un dispositivo de recepción de la rueda (8) de un equilibrador de la rueda,
- las posiciones de la pluralidad puntos (S') sobre la superficie de detección de imágenes (12) son determinadas por resolución sub-pixel, y - las posiciones de la pluralidad puntos (S) de la zona de incidencia (4) sobre la superficie de rueda se determinan por triangulación de punto único desde la posición determinada desde la que el haz luminoso plano (3) es emitido y desde las posiciones determinadas de la pluralidad de puntos (S') sobre la superficie de detección de imágenes (12).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07014949.
Solicitante: SNAP-ON EQUIPMENT SRL A UNICO SOCIO..
Nacionalidad solicitante: Italia.
Dirección: Via Provinciale per Carpi, 33 42015 Correggio (RE) ITALIA.
Inventor/es: BRAGHIROLI, FRANCESCO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60C25/05 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60C NEUMATICOS PARA VEHICULOS; INFLADO DE NEUMATICOS; CAMBIO DE NEUMATICOS; FIJACION DE VALVULAS A CUERPOS ELASTICOS INFLABLES, EN GENERAL; DISPOSITIVOS O INSTALACIONES CONCERNIENTES A LOS NEUMATICOS. › B60C 25/00 Aparatos o herramientas adaptados para el montaje, el desmontaje o el examen de neumáticos (ensayo de neumáticos G01M 17/02). › Máquinas.
- B60C25/138 B60C 25/00 […] › con un movimiento de rotación del útil o del soporte del neumático.
- G01M17/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › G01M 17/00 Ensayos de vehículos (ensayos de estanqueidad G01M 3/00; ensayos de las propiedades elásticas de carcasas o chasis, p. ej. ensayos de torsión G01M 5/00; ensayos de alineación de los dispositivos de iluminación delantera de vehículos G01M 11/06; ensayos de motores G01M 15/00). › Neumáticos.
PDF original: ES-2464867_T3.pdf
Fragmento de la descripción:
Procedimiento y aparato para la determinación de las dimensiones geométricas de una rueda de vehículo [0001] La invención se refiere a un procedimiento según el preámbulo de la reivindicación 1 y aparato según el preámbulo de la reivindicación 9.
US No. 5, 054, 918 describe este procedimiento y este aparato para la determinación de las dimensiones geométricas de una rueda de vehículo que comprende un sistema de exploración de luz estructurada que determina las características estructurales de una rueda de vehículo mediante el análisis de la luz reflejada desde una tira donde un haz de luz plano incide sobre el cuerpo de la rueda del vehículo.
US 2004/0165180 A1 describe un procedimiento y un aparato para determinar las dimensiones geométricas de una rueda de vehículo o de sus partes, en el que una imagen es adquirida por un sistema de cámara para facilitar los procedimientos de servicio de rueda del vehículo. La rueda de vehículo puede fijarse a un equilibrador de ruedas o un cambiador de neumáticos.
EP-A-1 515 129 describe un dispositivo detector que explora una pluralidad de puntos sobre la superficie de una rueda de vehículo y evalúa los valores de medida conseguidos mediante triangulación.
El problema de la presente invención es proporcionar un procedimiento y un aparato del tipo expuesto en la parte de introducción de esta memoria descriptiva, con los que las dimensiones geométricas de una rueda de vehículo y de al menos una parte de una rueda de vehículo se determinan de forma fiable.
Este problema se resuelve mediante las características de las reivindicaciones 1, 9 y 21. Las reivindicaciones dependientes describen desarrollos ventajosos de la invención.
La invención proporciona que el contorno de la rueda (conjunto de llanta / neumático) , especialmente el contorno de la llanta es detectado de una manera óptica. Un sistema detector óptico preferido se basa en una cámara digital, cuyas señales de detección son evaluadas a partir de triangulación. Las señales de detección del detector son convertidas en señales digitales eléctricas. Un dispositivo transductor adecuado está integrado preferentemente en el detector. Preferentemente la exploración se efectúa a dos lados de la rueda del vehículo (conjunto llanta/ neumático) o del borde de la banda de rodadura de la llanta. Una exploración adicional puede realizarse en la periferia (banda de rodadura) de la rueda de vehículo.
Para la detección sin contacto, el dispositivo de detección respectivo puede ser una hoja de sistema de imágenes de luz basado en el principio de triangulación de láser óptico, también designado en lo sucesivo como procedimiento de triangulación. El dispositivo detector óptico puede tener una fuente de luz que emite un haz luminoso en forma de lámina de luz o un haz luminoso plano sobre la superficie de la rueda o de la superficie de la llanta en una o más direcciones determinadas y que se cruza con la superficie de la llanta en una pluralidad de puntos de incidencia a lo largo de una zona de incidencia en forma de tira. En cada uno de los puntos de incidencia, el haz luminoso se dispersa en una pluralidad de rayos de luz que se reflejan. Al menos una pluralidad de estos rayos de luz reflejada será luego concentrada o enfocada por un sistema de lentes o de zona de pupila de entrada área de imagen proyectada en forma de tira sobre una superficie de detección fotosensible de dos dimensiones. Los espaciados y las posiciones de los puntos de incidencia individuales detectados en la rueda o la llanta pueden ser entonces determinados por el procedimiento de triangulación en dependencia de las direcciones de los haces de luz emitidos y reflejados, en particular sobre las señales de detección.
Uno o más dispositivos de detección se pueden disponer en un equilibrador de la rueda.
La invención se describirá con mayor detalle a continuación mediante una realización a modo de ejemplo con referencia a las figuras en las que:
La figura 1 muestra esquemáticamente una realización de un dispositivo de detección que incluye una fuente de luz y un detector;
La figura 2 muestra un equilibrador de ruedas, que está equipado con tres formas de realización del dispositivo de detección;
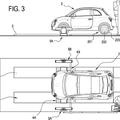
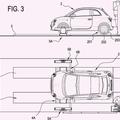
La figura 3 muestra un cambiador de neumáticos que está equipado con realizaciones del dispositivo de detección; y
Las figuras 4 y 5 muestran un sistema de numeración de los neumáticos.
Las realizaciones ilustradas incluyen unos medios de recepción de la rueda 8 en el que se puede fijar una rueda de vehículo (conjunto de llanta/ neumático) 1. Los medios de recepción de la rueda pueden tener, tal como se ilustra, una barra receptora, una placa de rueda en la que se coloca la llanta, o brazos de apriete sobre los que se apoya la llanta, u otra disposición de soporte.
La detección sin contacto y en particular óptica con uno o más dispositivos de detección se efectúa esencialmente para detectar los contornos de la llanta y o características estructurales de la rueda del vehículo 1. Además, es posible detectar las dimensiones geométricas de la rueda 1 y de partes de la rueda.
El principio de este dispositivo de detección sin contacto (Figura 1) de la invención se basa en un procedimiento de triangulación, tal como se describe a continuación en combinación con una fuente de luz 2 que genera un haz luminoso plano y con un detector 5 que produce señales eléctricas, especialmente digitales que son proporcionales a una imagen proyectada de una zona de incidencia en forma de tira 5 en una superficie de la rueda. El dispositivo de detección tiene la fuente de luz 2, por ejemplo, una fuente de láser, que comprende un generador de patrones, por ejemplo, un generador de línea óptica realizado con una lente cilíndrica, que emite un haz luminoso plano 3 en forma de lámina de luz por el generador de patrones sobre la superficie de la zona de incidencia en forma de tira 4 sobre la superficie de rueda. Los puntos de incidencia pertenecen tanto a la superficie de la rueda incidida y a la lámina de luz plana 3. En cada uno de estos puntos de incidencia, el haz luminoso se dispersa en una pluralidad de rayos de luz y forma un haz reflejado. El haz luminoso reflejado será entonces detectado por un detector fotosensible 5 que tiene una superficie de detección de imágenes 12 que puede ser o bien un dispositivo CCD o preferiblemente un dispositivo de CMOS. La superficie de detección de imágenes 12 proporciona una superficie de luz bidimensional o fotosensible. Antes de ser detectado, el haz luminoso reflejado se concentra hasta un punto o se enfoca mediante una pupila de entrada 6 que es un sistema de lente de enfoque que puede estar asociado con un filtro pasa banda óptico, y proyectado sobre el plano focal de la pupila de entrada 6 sobre la superficie de detección de imágenes fotosensible 12 donde se produce una zona de imagen proyectada en forma de tira. Con el fin de mejorar la precisión de la medición, cada punto proyectado de la zona de imagen proyectada en forma de tira tiene una posición determinada preferentemente con una resolución sub-pixel antes que con la resolución del píxel físico. Esa determinación de pico sub-píxel se puede lograr mediante varias técnicas de detección bien conocidas, tales como la aproximación de Gauss, algoritmos de centroide o de centro de masas, o de estimador parabólico. La relación entre la posición en un sistema de coordenadas de tres dimensiones de un punto de incidencia, expresada en unidad de longitud del sistema internacional (SI) , y la posición en un sistema de coordenadas de dos dimensiones del punto proyectado correspondiente, expresado preferentemente en sub- píxeles, se define por calibración usando una transformación inversa. La calibración puede llevarse a cabo ya sea mediante el uso de la llamada calibración basada en modelo que se basa en el enfoque de modelo de cámara geométrico o mediante el uso de la calibración directa o de cuadro negro basada en una interpolación polinómica tal como la interpolación spline cúbica.
Los espaciados y por lo tanto las posiciones de los puntos de incidencia individuales detectados en la rueda (conjunto llanta/ neumático) o la llanta pueden ser entonces determinados según las direcciones de los haces luminosos emitidos y reflejados. Cabe señalar que la configuración de la óptica geométrica del dispositivo de detección óptico puede ser diseñada de manera que se respete el principio de Scheimpflug con el fin de evitar el desenfoque excesivo a diferentes distancias, y que la sustracción de fondo puede ser implementada con el fin de reducir la sensibilidad a la luz ambiental del sistema. Por otra parte, tanto la potencia... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de determinación de las dimensiones geométricas de una rueda de vehículo a motor (conjunto llanta/ neumático) mediante detección sin contacto, en el que
- al menos un haz luminoso plano (3) es emitido desde una o más posiciones determinadas sobre la rueda (1) o al menos una parte de la rueda,
- el haz luminoso se refleja en una zona de incidencia en forma de tira (4) sobre la superficie de la rueda,
- el haz reflejado se focaliza y proyecta en una zona de imagen proyectada en forma de tira sobre una superficie de detección de imágenes sensible a la luz de dos dimensiones (12) capaz de generar señales de imagen que son proporcionales a las posiciones de una pluralidad de puntos (S’) de la zona de imagen proyectada,
- las señales de detección son evaluadas para determinar la forma y/o posición de la zona de incidencia en forma de tira (4) sobre la rueda (1) , caracterizado por el hecho de que
- la rueda (1) se fija a un dispositivo de recepción de la rueda (8) de un equilibrador de la rueda,
-las posiciones de la pluralidad puntos (S’) sobre la superficie de detección de imágenes (12) son determinadas por resolución sub-pixel, y - las posiciones de la pluralidad puntos (S) de la zona de incidencia (4) sobre la superficie de rueda se determinan por triangulación de punto único desde la posición determinada desde la que el haz luminoso plano (3) es emitido y desde las posiciones determinadas de la pluralidad de puntos (S’) sobre la superficie de detección de imágenes (12) .
2. Un procedimiento según la reivindicación 1, caracterizado por el hecho de que al menos un haz luminoso (3) está dirigido sobre la rueda (1) o sobre la llanta que gira sobre un eje estacionario (11) .
3. Un procedimiento según cualquiera de las reivindicaciones 1 ó 2, caracterizado por el hecho de que al menos una superficie anular alrededor del eje de la rueda se detecta sobre la rueda (1) o sobre la llanta con el al menos un haz luminoso (3) .
4. Un procedimiento según cualquiera de las reivindicaciones 1 a 3, caracterizado por el hecho de que al menos uno de los dos rebordes de llanta se detecta con el haz luminoso (3) .
5. Un procedimiento según cualquiera de las reivindicaciones 1 a 4, caracterizado por el hecho de que la superficie de la rueda periférica exterior (1) o de la llanta se detecta con el haz luminoso (3) .
6. Un procedimiento según cualquiera de las reivindicaciones 1 a 5, caracterizado por el hecho de que los espaciados de las partes de la rueda o de las partes de llanta respectivas que se detectan mediante el haz luminoso
(3) se determinan con respecto a una referencia estacionaria.
7. Un procedimiento según cualquiera de las reivindicaciones 1 a 6, caracterizado por el hecho de que el haz luminoso plano (3) es emitido en un plano que es paralelo al eje de la rueda (11) .
8. Un procedimiento según cualquiera de las reivindicaciones 1 a 7, caracterizado por el hecho de que la rueda de vehículo se fija a un árbol de medida (15) del equilibrador de la rueda (14) y al menos un haz luminoso plano (3) está dirigido al lado interior de la rueda (1) y/o al lado exterior de la rueda (1) y o a la banda de rodadura de la rueda (1) .
9. Un aparato para la determinación de las dimensiones geométricas de una rueda de vehículo (1) que comprende:
- al menos una fuente de luz (2) situada en una posición determinada y adecuada para emitir un haz luminoso plano
(3) en al menos una dirección determinada sobre una zona de incidencia en forma de tira (4) de la superficie de rueda o una parte de la superficie de rueda;
-al menos un detector (5) situado en una posición determinada y adecuada para detectar el haz luminoso reflejado desde la zona de incidencia en forma de tira (4) sobre la superficie de rueda,
- en el que el detector (5) incluye una pupila de entrada de focalización (6) a través de la cual el haz reflejado se proyecta sobre una superficie de detección sensible a la luz de dos dimensiones (12) dispuesta en el plano focal de la pupila de entrada (6) y producir señales de imagen que son proporcionales al emplazamiento de una zona de imagen proyectada en forma de tira del haz reflejado sobre la superficie de detección (12) ,
- una disposición de evaluación (7) que está conectada con el detector (5) y adecuada para determinar a partir de las señales de detección la posición y forma geométrica de la zona de incidencia en forma de tira (4) sobre la superficie de rueda,
caracterizado por el hecho de que
- la al menos una fuente de luz (2) y el detector asociado (5) están montados sobre un equilibrador de la rueda,
- el detector (5) está diseñado para determinar mediante resolución sub-pixel la posición de una pluralidad de puntos (S’) de la zona de imagen proyectada sobre la superficie de detección (12) , y
- la disposición de evaluación (7) está diseñada para determinar mediante triangulación de punto único la posición de una pluralidad de puntos (S) en la zona de incidencia (4) sobre la superficie de rueda desde la posición
determinada de la fuente de luz (2) y las posiciones determinadas de la pluralidad de puntos sobre la superficie de detección (12) .
10. Aparato según la reivindicación 9, caracterizado por el hecho de que la fuente de luz (2) y el detector (5) pueden pivotar de manera síncrona sobre un eje común y una señal eléctrica proporcional al ángulo de pivotamiento respectivo se suministra a la disposición de evaluación (7) para emitir un único haz luminoso en un plano.
11. Aparato según la reivindicación 9 o la 10, caracterizado por el hecho de que la al menos una fuente de luz (2) y el detector (5) están posicionados estacionarios.
12. Aparato según alguna de las reivindicaciones 9 a 11, caracterizado por el hecho de que la disposición de evaluación (7) es adecuada para determinar posiciones de una pluralidad de puntos on la zona de incidencia en forma de tira (4) sobre la superficie de rueda desde las direcciones del haz luminoso emitida por la fuente de luz (15) y el haz luminoso reflejado en la superficie de rueda mediante la triangulación.
13. Aparato según alguna de las reivindicaciones 9 a 12, caracterizado por el hecho de que la rueda (1) está montada sobre un dispositivo de recepción de la rueda (8) giratorio sobre el eje de la rueda (11) .
14. Aparato según cualquiera de las reivindicaciones 9 a 13, caracterizado por el hecho de que el plano del haz luminoso plano (3) es aproximadamente paralelo to el eje de rotación (11) de la rueda (1) .
15. Aparato según alguna de las reivindicaciones 9 a 14, caracterizado por el hecho de que las posiciones espaciales de los puntos respectivamente detectados de la zona de incidencia en forma de tira (4) sobre la superficie de rueda se determinan con respecto a una posición de referencia.
16. Aparato según cualquiera de las reivindicaciones 9 a 15, caracterizado por el hecho de que la fuente de luz (2) es un láser.
17. Aparato según cualquiera de las reivindicaciones 9 a 16, caracterizado por el hecho de que la superficie de detección (12) comprende un dispositivo semiconductor de óxido metálico complementario (CMOS) .
18. Aparato según cualquiera de las reivindicaciones 9 a 17, caracterizado por el hecho de que el detector (5) es una cámara digital.
19. Aparato según cualquiera de las reivindicaciones 9 a 18, caracterizado por el hecho de que, la fuente de luz
(2) y el detector (5) están dispuestos sobre un soporte común o en un alojamiento común (13) .
20. Aparato según la reivindicación 9, caracterizado por el hecho de que una fuente de luz (2) y el detector asociado (5) están dispuestos para explorar el lado interior de la rueda de vehículo (1) y/o una fuente de luz (2) y el o los detectores asociados están dispuestos para explorar el lado exterior de la rueda de vehículo (1) , en el que la rueda de vehículo (1) está fijada a un árbol de medida (15) del equilibrador de la rueda (14) .
21. Utilización de un procedimiento según cualquiera de las reivindicaciones 1 a 8 o de un aparato según cualquiera de las reivindicaciones 9 a 20 para determinar al menos uno de los parámetros: ovalización del neumático, desgaste de la banda de rodadura del neumático, conicidad del neumático, defectos de neumático en la banda de rodadura y/o sobre las paredes laterales, defectos de llanta sobre el exterior y/sobre el interior de la llanta y geometría de asiento del borde sobre la llanta, presencia y/o posición de al menos un peso de corrección, posición de válvula.
Patentes similares o relacionadas:
Método y sistema para el análisis del estado de neumáticos, del 1 de Enero de 2020, de Wheelright Limited: Un método para evaluar el estado de un neumático en una rueda que está montada en un vehículo , mientras el vehículo se mueve y el neumático […]
 Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]
Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]
 Método y aparato para verificar neumáticos de ruedas de vehículos, del 26 de Junio de 2019, de NEXION S.p.A: Un método para revisar los neumáticos en las ruedas de un vehículo caracterizado por que comprende las siguientes etapas:
- cuando el vehículo […]
Método y aparato para verificar neumáticos de ruedas de vehículos, del 26 de Junio de 2019, de NEXION S.p.A: Un método para revisar los neumáticos en las ruedas de un vehículo caracterizado por que comprende las siguientes etapas:
- cuando el vehículo […]
Mecanismo de montaje de una llanta en un neumático, método de montaje de una llanta, equipo de inspección visual automática, método de inspección visual automática, del 3 de Junio de 2019, de BRIDGESTONE CORPORATION: Un mecanismo de montaje de una llanta en un neumático en que se proporciona una llanta superior para el montaje de una llanta en un neumático (T) al que […]
Proceso y máquina para la identificación y la reparación de defectos en neumáticos usados, del 22 de Mayo de 2019, de GO ENERGY S.r.l: Proceso automático para la identificación y la reparación de defectos en neumáticos usados raspados para ser dotados de un nuevo […]
Dispositivo y método para bloquear una llanta de una rueda a una mesa giratoria, del 3 de Abril de 2019, de NEXION S.p.A: Un dispositivo para bloquear una llanta de una rueda a una unidad de sujeción de rueda equipada con una placa de soporte y un árbol […]
Sistema de verificación de neumáticos de vehículo, del 27 de Marzo de 2019, de Wheelright Limited: Un método para medir características de un neumático en una rueda de vehículo, que comprende: (a) mover el vehículo en la dirección longitudinal de modo que el […]
Dispositivo de equilibrio, dispositivo de uniformidad y métodos para utilizarlos, del 20 de Febrero de 2019, de ANDROID INDUSTRIES LLC: Un aparato (10'), que comprende: un dispositivo de uniformidad (10u) que determina la uniformidad de una pieza de trabajo (TW), en donde el dispositivo de uniformidad (10u) […]