PROCEDIMIENTO, SISTEMA Y PRODUCTO DE PROGRAMA INFORMATICO PARA CONTROL DE DERIVA DE RUEDAS.
Un procedimiento para controlar la deriva de las ruedas (lambda) de al menos una rueda en un vehículo,
que comprende las etapas de:
- obtener al menos un parámetro de estado dinámico del vehículo,
- estimar adaptativamente parámetros de un modelo paramétrico de deriva-fuerza de rozamiento del vehículo,
- determinar (G(s)) un valor de referencia de deriva indicativo de la deriva de las ruedas a un par de la línea de transmisión determinado a partir de un modelo dinámico de los componentes relevantes del vehículo que comprende el modelo adaptativo paramétrico de deriva-fuerza de rozamiento, y
- controlar (R(s)) el par de la línea de transmisión (Ts) del vehículo determinando una señal de manipulación de par basándose en los parámetros de estado dinámico y el valor de referencia de deriva
Tipo: Resumen de patente/invención. Número de Solicitud: W03000807EP.
Solicitante: NIRA DYNAMICS AB.
Nacionalidad solicitante: Suecia.
Dirección: TEKNIKRINGEN 6,583 30 LINKOPING.
Inventor/es: GUSTAVSSON, FREDRIK, FORSSELL,URBAN, TORMANEN,MIKAEL, ENGBOM,JOHAN, GRANSTROM,MAGNUS.
Fecha de Publicación: .
Fecha Concesión Europea: 9 de Septiembre de 2009.
Clasificación Internacional de Patentes:
- B60K28/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › B60K 28/00 Dispositivos de seguridad para el control de la unidad de propulsión, especialmente adaptados para o dispuestos en vehículos, p. ej. que impiden el suministro de combustible o el encendido en caso de condiciones potencialmente peligrosas (para vehículos propulsados eléctricamente B60L 3/00; sistemas para control de la conducción del vehículo para fines no relacionados con el control de una subunidad particular B60W 30/00; sistemas de control d la conducción especialmente adaptados para vehículos terrestres autónomos B60W 60/00). › que responden o previenen el derrape o patinado de las ruedas (sistemas de control del frenado para la estabilidad del vehículo B60T 8/1755; dispositivos que regulan la fuerza de frenado sobre la rueda según una condición de velocidad B60T 8/32; control de la estabilidad del vehículo por otros medios distintos al control de la unidad propulsora únicamente B60W 30/02; prevención del patinado reduciendo la fuerza motriz en vehículos de raíl B61C 15/12).
- B60T8/1761D
Clasificación PCT:
- B60K28/16 B60K 28/00 […] › que responden o previenen el derrape o patinado de las ruedas (sistemas de control del frenado para la estabilidad del vehículo B60T 8/1755; dispositivos que regulan la fuerza de frenado sobre la rueda según una condición de velocidad B60T 8/32; control de la estabilidad del vehículo por otros medios distintos al control de la unidad propulsora únicamente B60W 30/02; prevención del patinado reduciendo la fuerza motriz en vehículos de raíl B61C 15/12).
- B60T8/00 B60 […] › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10).
Clasificación antigua:
- B60K28/16 B60K 28/00 […] › que responden o previenen el derrape o patinado de las ruedas (sistemas de control del frenado para la estabilidad del vehículo B60T 8/1755; dispositivos que regulan la fuerza de frenado sobre la rueda según una condición de velocidad B60T 8/32; control de la estabilidad del vehículo por otros medios distintos al control de la unidad propulsora únicamente B60W 30/02; prevención del patinado reduciendo la fuerza motriz en vehículos de raíl B61C 15/12).
- B60T8/00 B60T […] › Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10).
Fragmento de la descripción:
Procedimiento, sistema y producto de programa informático para control de deriva de ruedas.
Campo de la invención
La presente invención se refiere al control de velocidad de las ruedas de un vehículo, y más particularmente a un procedimiento, un sistema y un producto de programa informático para llevar a cabo un control de patinamiento o de deriva sobre una o más ruedas de vehículo u otro tipo de ruedas motrices. El documento DE3735673A1 describe la técnica anterior. Los valores en un punto de funcionamiento en la curva de deriva-fuerza de rozamiento son estimados. No se usa un modelo paramétrico de deriva-fuerza de rozamiento.
Antecedentes de la invención
La industria automovilística es una de las industrias más grandes y más competitivas de hoy en día. Hay muchos actores y una abundancia de automóviles diferentes dirigidos a un mercado altamente diversificado y se hacen grandes esfuerzos para mejorar el rendimiento y la seguridad en los productos sin reducir los beneficios. Una estrategia para hacer esto es desarrollar sistemas que puedan implementarse fácilmente en diferentes automóviles y adaptarse a los deseos de los clientes. Un ejemplo de esto son los denominados sistemas ABS (sistema antibloqueo de frenos) que a menudo son desarrollados por una compañía específica y luego son vendidos a muchos fabricantes de automóviles diferentes pero ajustados apropiadamente a las diferencias en las características de los vehículos como la masa del vehículo y el rendimiento del motor y la preferencia del cliente como el confort deseado. Por lo tanto, existe una necesidad de desarrollar un Sistema de estabilidad de vehículo con esta estrategia en mente.
Un vehículo está expuesto a muchas fuerzas diferentes durante la conducción. La suma de esas fuerzas decidirá cómo se comportará el vehículo. El conductor controla la trayectoria del vehículo controlando el par motor a través del acelerador, cambiando el ángulo de dirección, frenando y/o usando el embrague. Sin embargo, los efectos de las acciones adoptadas por el conductor dependerán de condiciones ambientales como la tracción entre el neumático y el terreno, las pendientes y la temperatura. Esto implica que el conductor tiene que hacer una estimación del entorno antes de adoptar una acción. A veces esta estimación es difícil de hacer correctamente y aquí es donde entran en juego los sistemas de estabilidad de vehículos. El sistema de estabilidad de vehículos más conocido es probablemente los frenos ABS que se usan para optimizar la fuerza de frenado dependiendo de las condiciones del terreno independientemente (el sis- tema ABS no puede aumentar la fuerza de frenado, sólo reducirla) de la fuerza de frenado solicitada por el conductor.
Otras propiedades del vehículo que son de interés controlar son la deriva, el deslizamiento y el derrape. La deriva se define esencialmente como la diferencia de velocidad entre el vehículo y la rueda motriz y su valor decidirá las fuerzas longitudinal y lateral procedentes de las ruedas que actúan sobre el vehículo. El deslizamiento se define como el comportamiento del vehículo al tomar una curva (subviraje y sobreviraje) y depende parcialmente de la deriva. Aquí se usa el derrape para indicar el estado inestable cuando todos los neumáticos del vehículo han perdido su capacidad de tracción y el vehículo está fuera de control. Hoy en día hay muchos sistemas diferentes disponibles en el mercado que intentan controlar esas propiedades. Ejemplos referentes a la técnica anterior son los sistemas de Volvo TRACS, DSA y DSTC. Son de configuración bastante diferente y en este documento no se analizarán con más detalle.
Un propósito de los sistemas de estabilidad de vehículos como un sistema anti-deriva es controlar las velocidades de las ruedas de un vehículo y, haciendo esto, lograr aceleración y manejo óptimos. Esto se hace en los sistemas de la técnica anterior con controladores desarrollados empíricamente, que habitualmente están implementados como grandes máquinas de estado finito basadas en tablas de consulta que usan el motor y/o los frenos como accionador. Como los parámetros de los sistemas anti-deriva normalmente se configuran para diferentes condiciones de conducción y propiedades específicas del vehículo, la implementación de los sistemas en nuevas plataformas ha demostrado llevar mucho tiempo y ser costosa.
Objeto de la invención
Un objeto de la presente invención es proporcionar un procedimiento mejorado, un producto de programa informático para llevar a cabo el procedimiento y un sistema para control de velocidad de las ruedas en vehículos. Un objeto adicional es proporcionar un procedimiento y un sistema para control de deriva de neumáticos con el objetivo de aumentar la flexibilidad y reducir los costes y el tiempo para la implementación en diferentes tipos de vehículos.
Resumen de la invención
La invención proporciona un procedimiento para controlar la deriva de las ruedas de un vehículo, en particular llevando a cabo control de anti-deriva, anti-patinamiento o ABS, que comprende las etapas de obtener al menos un parámetro de estado dinámico del vehículo, estimar adaptativamente parámetros de un modelo paramétrico de deriva-fuerza de rozamiento del vehículo, determinar un valor de referencia de deriva indicativo de la deriva de las ruedas a un par de la línea de transmisión determinado a partir de un modelo dinámico de los componentes relevantes del vehículo que comprende el modelo adaptativo paramétrico de deriva-fuerza de rozamiento, y controlar el par de la línea de transmisión del vehículo determinando una señal de manipulación de par basándose en los parámetros de estado dinámico y el valor de referencia de deriva.
Según otro aspecto, la invención proporciona un procedimiento para determinar la fuerza de tracción de un neumático sobre un vehículo, en particular en combinación con uno de los procedimientos precedentes, basándose en un modelo de deriva-rozamiento según la fórmula Ftrac=µ(?)Fz, donde µ es un valor de rozamiento, ? es un valor de deriva del neumático, Ftrac es una fuerza de tracción, Fz es la carga vertical sobre una rueda y µ(?) es una curva de deriva según el modelo de deriva-rozamiento.
Según otro aspecto más, la invención proporciona un sistema para controlar la deriva de las ruedas en un vehículo, que comprende un dispositivo para obtener al menos un parámetro de estado dinámico del vehículo, un dispositivo para estimar adaptativamente parámetros de un modelo paramétrico de deriva-fuerza de rozamiento del vehículo, un dispositivo para determinar un valor de referencia de deriva indicativo de la deriva de las ruedas a un par de la línea de transmisión determinado a partir de un modelo dinámico de los componentes relevantes del vehículo que comprende el modelo adaptativo paramétrico de deriva-fuerza de rozamiento, y un dispositivo para controlar el par de la línea de transmisión del vehículo determinando una señal de manipulación de par basándose en los parámetros de estado dinámico y el valor de referencia de deriva.
Según otro aspecto más, la invención proporciona un producto de programa informático que incluye código de programa para llevar a cabo un procedimiento de procesamiento de señal digital, cuando se ejecuta en un sistema informático, para controlar la deriva de las ruedas en un vehículo, que comprende un dispositivo para obtener al menos un parámetro de estado dinámico del vehículo, estimar adaptativamente parámetros de un modelo paramétrico de deriva-fuerza de rozamiento del vehículo, determinar un valor de referencia de deriva indicativo de la deriva de las ruedas a un par de la línea de transmisión determinado a partir de un modelo dinámico de los componentes relevantes del vehículo que comprende el modelo adaptativo paramétrico de deriva-fuerza de rozamiento, y un dispositivo para controlar el par de la línea de transmisión del vehículo determinando una señal de manipulación de par basándose en los parámetros de estado dinámico y el valor de referencia de deriva.
La invención es aplicable para y adaptable a toda clase de vehículos transportados sobre neumáticos, como automóviles, motocicletas, camiones o furgones que tengan cualquier número de ruedas de acuerdo con las diferentes realizaciones y aspectos adicionales descritos en la descripción detallada.
Breve descripción de los dibujos
La presente invención se explicará con más detalle por medio de realizaciones ejemplares en conjunción con los dibujos acompañantes,...
Reivindicaciones:
1. Un procedimiento para controlar la deriva de las ruedas (?) de al menos una rueda en un vehículo, que comprende las etapas de:
- - obtener al menos un parámetro de estado dinámico del vehículo,
- - estimar adaptativamente parámetros de un modelo paramétrico de deriva-fuerza de rozamiento del vehículo,
- - determinar (G(s)) un valor de referencia de deriva indicativo de la deriva de las ruedas a un par de la línea de transmisión determinado a partir de un modelo dinámico de los componentes relevantes del vehículo que comprende el modelo adaptativo paramétrico de deriva-fuerza de rozamiento, y
- - controlar (R(s)) el par de la línea de transmisión (Ts) del vehículo determinando una señal de manipulación de par basándose en los parámetros de estado dinámico y el valor de referencia de deriva.
2. El procedimiento de la reivindicación 1, en el que el cálculo basado en modelo está basado en un modelo de vehículo, que comprende al menos uno de
- - un modelo de motor,
- - un modelo dinámico de la línea de transmisión para estimar fuerzas en la trayectoria de contacto del neumático, y
- - un modelo de contacto entre neumático y carretera.
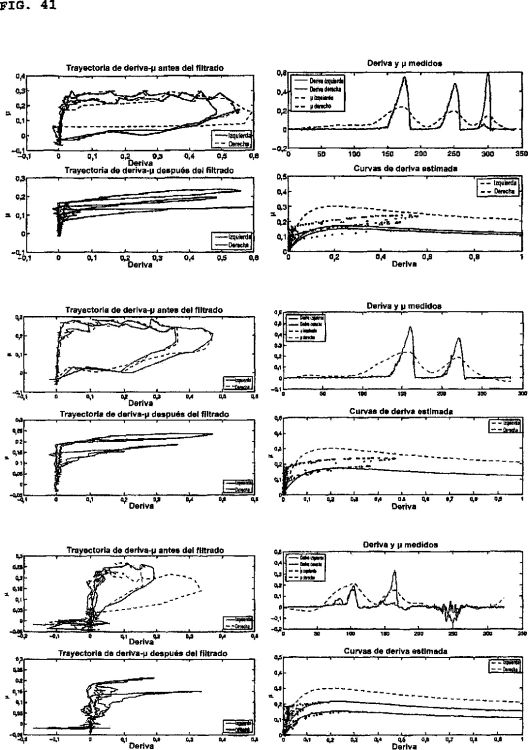
3. El procedimiento de la reivindicación 2, en el que el modelo de contacto entre neumático y carretera comprende un modelo de deriva-fuerza de rozamiento que tiene como resultado una curva de deriva indicativa de las características de la carretera respectiva.
4. El procedimiento de la reivindicación 3, en el que el modelo de deriva-rozamiento es un modelo lineal.
5. El procedimiento de la reivindicación 3, en el que el modelo de deriva-fuerza de rozamiento es no lineal.
6. El procedimiento de la reivindicación 3, en el que el modelo de deriva-rozamiento está definido por las siguientes fórmulas:

donde µ es un valor de rozamiento, ? es un valor de deriva, kslip es una pendiente de la deriva, ?max es un valor máximo de la deriva, Ftrac es una fuerza de tracción longitudinal y Fz es una carga vertical sobre una rueda.
7. El procedimiento de la reivindicación 5, en el que el modelo de deriva-rozamiento no lineal es un modelo de Promedio Móvil Autorregresivo de Tiempo Continuo (CARMA).
8. El procedimiento de la reivindicación 5, en el que el modelo de deriva-rozamiento no lineal es un modelo parametrizado de máximos.
9. El procedimiento de una cualquiera de las reivindicaciones 3-8, que además comprende una etapa para estimación de rozamiento (RFI), que proporciona una estimación de la fuerza de rozamiento utilizable máxima (µmax) y la pendiente inicial (k) de la curva de deriva (actual), que puede usarse como parámetro de entrada para el modelo de deriva-fuerza de rozamiento.
10. El procedimiento de una cualquiera de las reivindicaciones 3-9, en el que el valor de referencia de deriva se calcula según el modelo de deriva-rozamiento mediante un filtro adaptativo.
11. El procedimiento de la reivindicación 10, en el que el filtro adaptativo es un filtro de Kalman.
12. El procedimiento de una cualquiera de las reivindicaciones precedentes, en el que el control de par se consigue mediante bloqueo de combustible.
13. El procedimiento de la reivindicación 12, caracterizado porque el bloqueo de combustible comprende una estructura de control en cascada.
14. El procedimiento de una cualquiera de las reivindicaciones precedentes, en el que el control de par se consigue controlando al ángulo de la válvula de gases.
15. El procedimiento de una cualquiera de las reivindicaciones precedentes, en el que el control de par se consigue controlando el ángulo de encendido.
16. El procedimiento de una cualquiera de las reivindicaciones precedentes, en el que el control de par se consigue controlando los frenos de las ruedas.
17. El procedimiento de una cualquiera de las reivindicaciones precedentes, en el que los parámetros de estado dinámico comprenden al menos un parámetro de velocidad de las ruedas (?w).
18. El procedimiento de la reivindicación 17, en el que el parámetro de velocidad de las ruedas (?w) se obtiene mediante un sistema antibloqueo (ABS).
19. El procedimiento de una cualquiera de las reivindicaciones precedentes, en el que los parámetros de estado dinámico comprenden un parámetro de par motor (Teng).
20. El procedimiento de una cualquiera de las reivindicaciones precedentes, en el que los parámetros de estado dinámico comprenden un parámetro de velocidad del vehículo (vx).
21. El procedimiento de una cualquiera de las reivindicaciones precedentes, en el que los parámetros de estado dinámico comprenden un parámetro de pendiente de la curva de deriva (kslip).
22. El procedimiento de una cualquiera de las reivindicaciones precedentes, en el que el valor de referencia de deriva depende de las fuerzas laterales del vehículo.
23. Un procedimiento para determinar la fuerza de tracción (Ftrac) de un neumático en un vehículo, en particular en combinación con uno de los procedimientos precedentes, basado en un modelo de deriva-rozamiento según la fórmula

donde µ es un valor de rozamiento, ? es un valor de deriva del neumático, Ftrac es una fuerza de tracción, Fz es la carga vertical sobre una rueda y µ(?) es una curva de deriva según el modelo de deriva-rozamiento.
24. El procedimiento de la reivindicación 23, en el que el modelo de deriva-rozamiento no lineal es un modelo de Promedio Móvil Autorregresivo de Tiempo Continuo (CARMA).
25. El procedimiento de la reivindicación 23, en el que el modelo de deriva-rozamiento no lineal es un modelo parametrizado de máximos.
26. El procedimiento de una cualquiera de las reivindicaciones 23-25, en el que el valor de referencia de deriva se calcula según el modelo de deriva-fuerza de rozamiento mediante un filtro adaptativo.
27. El procedimiento de la reivindicación 26, en el que el filtro adaptativo es un filtro de Kalman.
28. Un sistema para controlar la deriva de las ruedas (?) de al menos una rueda en un vehículo, que comprende:
- - un dispositivo para obtener al menos un parámetro de estado dinámico del vehículo,
- - un dispositivo para estimar adaptativamente parámetros de un modelo paramétrico de deriva-fuerza de rozamiento del vehículo,
- - un dispositivo (G(s)) para determinar un valor de referencia de deriva indicativo de la deriva de las ruedas a un par de la línea de transmisión determinado a partir de un modelo dinámico de los componentes relevantes del vehículo que comprende el modelo adaptativo paramétrico de deriva-fuerza de rozamiento, y
- - un dispositivo (R(s)) para controlar el par de la línea de transmisión (Ts) del vehículo determinando una señal de manipulación de par basándose en los parámetros de estado dinámico y el valor de referencia de deriva.
29. Un producto de programa informático que incluye código de programa para llevar a cabo un procedimiento de procesamiento de señal digital, cuando se ejecuta en un sistema informático, para controlar la deriva (?) de al menos una rueda en un vehículo, que comprende:
- - obtener al menos un parámetro de estado dinámico del vehículo,
- - estimar adaptativamente parámetros de un modelo paramétrico de deriva-fuerza de rozamiento del vehículo,
- - determinar (G(s)) un valor de referencia de deriva indicativo de la deriva de las ruedas a un par de la línea de transmisión determinado a partir de un modelo dinámico de los componentes relevantes del vehículo que comprende el modelo adaptativo paramétrico de deriva-fuerza de rozamiento, y
- - controlar (R(s)) el par de la línea de transmisión (Ts) del vehículo determinando una señal de manipulación de par basándose en los parámetros de estado dinámico y el valor de referencia de deriva.
Patentes similares o relacionadas:
Procedimiento y disposición para monitorizar el estado de conducción de un vehículo y vehículo con una disposición de este tipo, del 15 de Abril de 2020, de Siemens Mobility GmbH: Procedimiento para monitorizar el estado de conducción de un vehículo, en particular de un vehículo ferroviario, en el que se capta una señal de número de revoluciones […]
Motocicleta, del 4 de Marzo de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una motocicleta con una fuente de potencia de accionamiento , una sección de control de fuente de potencia de accionamiento (22d, 220d), una rueda delantera […]
Vehículo incluyendo un dispositivo de control de tracción, del 8 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo incluyendo: un motor incluyendo un dispositivo de encendido , un dispositivo de inyección de combustible , y una válvula de mariposa electrónicamente […]
Sistema de control de potencia de accionamiento y vehículo equipado con un sistema de control de potencia de accionamiento, del 13 de Marzo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un sistema de control de fuerza de accionamiento para uso en un vehículo, incluyendo el vehículo una fuente de accionamiento , una rueda motriz a mover por […]
Sistema de tracción y un método para controlar dicho sistema de tracción, del 6 de Julio de 2016, de VOLVO LASTVAGNAR AB: Un método para controlar un sistema de tracción para un vehículo de carretera pesado, comprendiendo dicho sistema de tracción : - un primer el sistema de propulsión […]
 Procedimiento y sistema para controlar un grupo motopropulsor de un vehículo, del 2 de Julio de 2014, de VOLVO LASTVAGNAR AB: Un sistema de grupo motopropulsor para un vehículo que comprende un embrague principal automático , una caja de cambios escalonada y una unidad […]
Procedimiento y sistema para controlar un grupo motopropulsor de un vehículo, del 2 de Julio de 2014, de VOLVO LASTVAGNAR AB: Un sistema de grupo motopropulsor para un vehículo que comprende un embrague principal automático , una caja de cambios escalonada y una unidad […]
 Sistema y método para controlar la tracción en un vehículo de dos ruedas, del 20 de Marzo de 2013, de PIAGGIO & C. S.P.A.: Método para el control de la tracción en un vehículo de dos ruedas que comprende un motor controlado porpar y una pluralidad de […]
Sistema y método para controlar la tracción en un vehículo de dos ruedas, del 20 de Marzo de 2013, de PIAGGIO & C. S.P.A.: Método para el control de la tracción en un vehículo de dos ruedas que comprende un motor controlado porpar y una pluralidad de […]
 Motocicleta, del 14 de Marzo de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una motocicleta que comprende:
una fuente motriz (10a);
una rueda accionada por la fuente motriz (10a);
una rueda accionada ; y
caracterizada por;
una […]
Motocicleta, del 14 de Marzo de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una motocicleta que comprende:
una fuente motriz (10a);
una rueda accionada por la fuente motriz (10a);
una rueda accionada ; y
caracterizada por;
una […]