Dispositivo y procedimiento de regulación del desplazamiento de una carga suspendida.
Dispositivo de regulación del desplazamiento de una carga (15) suspendida por cables de una carretilla (10),
quees móvil según un primer eje (X) horizontal, en un aparato de elevación, comprendiendo el dispositivo unos mediospara la determinación de una longitud (L) de los cables (14) de suspensión de la carga (15) y unos medios para ladeterminación de un dato representativo de una velocidad (VX) de desplazamiento de la carretilla (10) según elprimer eje (X), caracterizado porque el dispositivo (20) de regulación calcula un primer ángulo (Θx) de oscilación dela carga (15) y una velocidad (Θ'x) de dicho primer ángulo (Θx) de oscilación, utilizando únicamente dicha longitud(L) y dicho dato representativo de la velocidad (VX) de desplazamiento, según el primer eje (X), como únicasvariables de entrada, y utilizando una aceleración (Θ"x) de dicho primer ángulo (Θx) de oscilación como variableinterna.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/065696.
Solicitante: SCHNEIDER TOSHIBA INVERTER EUROPE SAS.
Nacionalidad solicitante: Francia.
Dirección: 33, RUE ANDRE BLANCHET 27120 PACY SUR EURE FRANCIA.
Inventor/es: STANTCHEV,PENTCHO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C13/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › para limitar o impedir el balanceo longitudinal o transversal de las cargas.
- B66C13/48 B66C 13/00 […] › Control automático del accionamiento de las grúas para producir un ciclo de trabajo único o repetido; Control por programación.
- G05D19/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 19/00 Control de oscilaciones mecánicas, p. ej. de la amplitud, de la frecuencia, de la fase. › caracterizado por la utilización de medios eléctricos.
PDF original: ES-2409096_T3.pdf
Fragmento de la descripción:
Dispositivo y procedimiento de regulación del desplazamiento de una carga suspendida La presente invención se refiere a un dispositivo de regulación y a un procedimiento de regulación del desplazamiento de una carga suspendida por cables de una carretilla móvil en un aparato elevador.
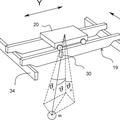
Los aparatos elevadores, tales como pórticos, grúas o puentes grúa, comprenden habitualmente una carretilla que se desplaza por unos raíles según un eje X horizontal. Este primer movimiento, según el eje X, se denomina generalmente movimiento de dirección ( Trolley o Short travel movement) . En función del tipo de aparatos, a veces estos raíles además pueden ser a su vez móviles, según un eje Y horizontal perpendicular al eje X que, de este modo, permite a la carretilla poder desplazarse según los ejes X e Y. Este segundo movimiento, según el eje Y, se denomina generalmente movimiento de traslación ( Crane o Long travel movement) . Se asocia un dispositivo de suspensión de la carga a unos cables que pasan por la carretilla, pudiendo variar la longitud de los cables, de manera que se pueda desplazar la carga según un eje Z vertical, denominado movimiento de elevación ( Hoisting movement) .
La manipulación de una carga mediante un aparato elevador conlleva balanceos de la carga que evidentemente se desean amortiguar para poder transferir la carga suavemente y con total seguridad, y ello en el menor intervalo de tiempo posible. Estos balanceos se generan mediante la aceleración del o de los movimientos horizontales de la carretilla, según los ejes X y/o Y, y su frecuencia de oscilación depende de la longitud de los cables. Existen ya varias soluciones para disminuir automáticamente el ángulo de oscilación de una carga suspendida de este tipo.
El documento FR2638344 describe un dispositivo de regulación de la transferencia de una carga suspendida que permite intervenir sobre los mandos de desplazamiento de la carretilla a partir de las correcciones de la posición de la carretilla y del ángulo de oscilación. El ángulo de la oscilación se mide periódicamente mediante sensores asociados a la carretilla y a la carga. La necesidad de mediciones periódicas del ángulo de la oscilación conlleva la utilización permanente de sensores de ángulo. Ahora bien, éstos se utilizan a menudo en un entorno exterior o agresivo, tal como un medio siderúrgico, por ejemplo, que presenta una temperatura ambiente elevada. Por lo tanto, es necesario un mantenimiento continuo de los sensores para su conservación.
Para paliar la presencia permanente de un sensor de ángulo de oscilación en fase de explotación, el documento FR2775678 describe un procedimiento de regulación que comprende una primera fase inicial de modelización o de identificación por aprendizaje de una función de transferencia propia del aparato a regular, utilizando los datos que proporciona un sensor del ángulo de oscilación, luego una segunda fase de explotación en la que esta función de transferencia determinada de este modo entonces permite regular la carga suspendida sin utilizar un sensor de ángulo de oscilación. De este modo, se pueden sortear en particular los problemas de entorno y de mantenimiento del sensor. La puesta en práctica de un procedimiento de este tipo, sin embargo sigue siendo bastante compleja a causa de la existencia de esta fase inicial de modelización o de aprendizaje.
Por otro lado, el documento US5443566 describe un dispositivo electrónico de control de oscilación (o “antisway control”) que utiliza en particular como parámetro variable de entrada la fuerza de aceleración de la carretilla, gracias a una medición en tiempo real de la corriente que circula en el motor encargado de efectuar el movimiento horizontal de la carretilla. Esta medición de la corriente vuelve el dispositivo de regulación del balanceo de la carga más complejo y hace más difícil la implantación de un dispositivo de este tipo en un equipo de automatismo físicamente alejado del variador de velocidad de desplazamiento de la carretilla. Además, el valor de la corriente o del par motor puede depender del peso de la carga suspendida, mientras que la oscilación no depende del peso de la carga. Ahora bien, como no se conoce este peso, el uso de una corriente del motor en el algoritmo de cálculo de la oscilación podría conllevar por lo tanto, faltas de precisión en la corrección de la oscilación.
El documento US 5 219 420 describe un procedimiento para el manejo de una grúa basado en una solución de doble rampa para amortiguar la oscilación.
Esa es la razón por la que la invención tiene por objetivo dominar las oscilaciones de una carga suspendida durante su traslado, utilizando un dispositivo o un procedimiento simple, rápido y fácil de aplicar. Ésta permite minimizar las mediciones o la toma de datos necesarios para controlar y dominar la oscilación de una carga.
Para ello, la invención describe un dispositivo de regulación del desplazamiento de una carga suspendida por cables de una carretilla, que es móvil según un primer eje horizontal, en un aparato elevador, comprendiendo el dispositivo unos medios para determinar la longitud de los cables de suspensión de la carga y unos medios para determinar un dato representativo de una velocidad de desplazamiento de la carretilla según el primer eje. El dispositivo de regulación calcula un primer ángulo de oscilación de la carga y una velocidad de dicho primer ángulo de oscilación, utilizando únicamente dicha longitud y dicho dato representativo de la velocidad de desplazamiento, según el primer eje como únicas variables de entrada, y utilizando una aceleración de dicho primer ángulo de oscilación como variable interna.
De acuerdo con una característica, el dispositivo de regulación calcula el primer ángulo de oscilación con la ayuda de un proceso iterativo, utilizando la velocidad y la aceleración de dicho primer ángulo de oscilación.
De acuerdo con una característica, el dato representativo de la velocidad de desplazamiento de la carretilla según el primer eje, se determina utilizando una referencia de velocidad, proporcionada a un variador de velocidad, que regula el desplazamiento de la carretilla según el primer eje. Como alternativa, el dato representativo de la velocidad de desplazamiento de la carretilla, según el primer eje, se determina utilizando una estimación de velocidad que se elabora mediante un variador de velocidad que regula el desplazamiento de la carretilla según el primer eje.
De acuerdo con otra característica, el dispositivo de regulación envía una señal de corrección que se añade a una consigna de velocidad para proporcionar una referencia de la velocidad de desplazamiento de la carretilla según el primer eje. La señal de corrección se calcula aplicando un coeficiente de corrección al primer ángulo de oscilación calculado y un coeficiente de corrección a la velocidad calculada del primer ángulo de oscilación. Los coeficientes de corrección son preferentemente variables en función de la longitud de los cables de suspensión de la carga.
De acuerdo con otra característica, la carretilla también es móvil según un segundo eje horizontal perpendicular al primer eje. El dispositivo de regulación comprende unos medios para determinar un dato representativo de la velocidad de desplazamiento de la carretilla según el segundo eje, y calcula un segundo ángulo de oscilación de la carga y una velocidad de dicho segundo ángulo de oscilación, utilizando únicamente dicha longitud y dicho dato representativo de la velocidad de desplazamiento según el segundo eje como únicas variables de entrada, y utilizando una aceleración de dicho segundo ángulo de oscilación como variable interna.
De acuerdo con otra característica, la carretilla también es móvil, según un segundo eje horizontal perpendicular al primer eje, y comprende unos medios para determinar una velocidad de desplazamiento de la carretilla según el segundo eje. El dispositivo de regulación calcula un segundo ángulo de oscilación de la carga y una velocidad de dicho segundo ángulo de oscilación, utilizando únicamente la longitud de los cables y la velocidad de desplazamiento según el segundo eje como únicas variables de entrada.
La invención describe también un procedimiento de regulación del desplazamiento de una carga suspendida por cables de una carretilla, que es móvil al menos según un eje horizontal, en un aparato elevador. El procedimiento de regulación se aplica mediante el dispositivo de regulación y comprende una etapa de cálculo que permite determinar un ángulo de oscilación de la carga y una velocidad del ángulo de oscilación, utilizando únicamente como únicas variables de entrada una longitud... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de regulación del desplazamiento de una carga (15) suspendida por cables de una carretilla (10) , que es móvil según un primer eje (X) horizontal, en un aparato de elevación, comprendiendo el dispositivo unos medios para la determinación de una longitud (L) de los cables (14) de suspensión de la carga (15) y unos medios para la determinación de un dato representativo de una velocidad (VX) de desplazamiento de la carretilla (10) según el primer eje (X) , caracterizado porque el dispositivo (20) de regulación calcula un primer ángulo (Өx) de oscilación de la carga (15) y una velocidad (Ө’x) de dicho primer ángulo (Өx) de oscilación, utilizando únicamente dicha longitud
(L) y dicho dato representativo de la velocidad (VX) de desplazamiento, según el primer eje (X) , como únicas variables de entrada, y utilizando una aceleración (Ө”x) de dicho primer ángulo (Өx) de oscilación como variable interna.
2. Dispositivo de regulación de acuerdo con la reivindicación 1, caracterizado porque el dispositivo (20) de regulación calcula el primer ángulo (Өx) de oscilación con la ayuda de un proceso iterativo, utilizando la velocidad (Ө’x) de dicho primer ángulo (Өx) de oscilación y la aceleración (Ө”x) de dicho primer ángulo (Өx) de oscilación.
3. Dispositivo de regulación de acuerdo con la reivindicación 1, caracterizado porque el dato representativo de la velocidad (VX) de desplazamiento de la carretilla, según el primer eje (X) , se determina utilizando una referencia (Vrx) de velocidad que se proporciona a un variador (Dx) de velocidad que guia el desplazamiento de la carretilla
(10) según el primer eje (X) .
4. Dispositivo de regulación de acuerdo con la reivindicación 1, caracterizado porque el dato representativo de la velocidad (VX) de desplazamiento de la carretilla, según el primer eje (X) , se determina utilizando una estimación de velocidad que se elabora mediante un variador (Dx) de velocidad que guia el desplazamiento de la carretilla (10) según el primer eje (X) .
5. Dispositivo de regulación de acuerdo con la reivindicación 1, caracterizado porque el dispositivo de regulación envía una señal (ΔVx) de corrección que se añade a una consigna de velocidad (Vcx) para proporcionar una referencia de velocidad (Vrx) de desplazamiento de la carretilla (10) , según el primer eje (X) , la señal (ΔVx) de corrección se calcula aplicando un coeficiente (KӨx, K’Өx) de corrección al primer ángulo (Өx) de oscilación calculado y a la velocidad (Ө’x) calculada del primer ángulo (Өx) de oscilación.
6. Dispositivo de regulación de acuerdo con la reivindicación 1, en el que la carretilla (10) también es móvil según un segundo eje (Y) horizontal perpendicular al primer eje (X) , y que comprende unos medios para determinar un dato representativo de una velocidad (VY) de desplazamiento de la carretilla (10) según el segundo eje (Y) , caracterizado porque el dispositivo (20) de regulación calcula un segundo ángulo (Өy) de oscilación de la carga (15) y una velocidad (Ө’y) de dicho segundo ángulo (Өy) de oscilación, utilizando únicamente dicha longitud (L) y dicho dato representativo de la velocidad (VY) de desplazamiento según el segundo eje (Y) como únicas variables de entrada, y utilizando una aceleración (Ө”y) de dicho segundo ángulo (Өy) de oscilación como variable interna.
7. Dispositivo de regulación de acuerdo con la reivindicación 6, caracterizado porque el dispositivo (20) de regulación calcula el segundo ángulo (Өy) de oscilación con la ayuda de un proceso iterativo utilizando la velocidad (Ө’y) de dicho segundo ángulo (Өy) de oscilación y la aceleración (Ө”y) de dicho segundo ángulo (Өy) de oscilación.
8. Dispositivo de regulación de acuerdo con la reivindicación 6, caracterizado porque el dato representativo de la velocidad (VY) de desplazamiento de la carretilla, según el segundo eje (Y) , se determina utilizando una referencia (Vr y ) de la velocidad de desplazamiento de la carretilla según el segundo eje (Y) .
9. Dispositivo de regulación de acuerdo con la reivindicación 6, caracterizado porque el dato representativo de la velocidad (VY) de desplazamiento de la carretilla, según el segundo eje (Y) , se determina utilizando una medida de la velocidad de desplazamiento de la carretilla (10) según el segundo eje (Y) .
10. Dispositivo de regulación de acuerdo con la reivindicación 6, caracterizado porque el dispositivo de regulación envía una señal (ΔVy) de corrección que se añade a una consigna de velocidad (Vcy) para proporcionar una referencia de la velocidad (Vr y ) de desplazamiento de la carretilla (10) , según el segundo eje (Y) , la señal (ΔVy) de corrección se calcula aplicando un coeficiente (KӨy, K’Өy) de corrección al segundo ángulo (Өy) de oscilación calculado y a la velocidad (Ө’y) calculada del segundo ángulo (Өy) de oscilación.
11. Dispositivo de regulación de acuerdo con la reivindicación 5 ó 10, caracterizado porque los coeficientes (KӨx, K’Өx, KӨy, K’Өy) de corrección son variables en función de la longitud (L) de los cables (14) de suspensión de la carga (15) .
12. Procedimiento de regulación del desplazamiento de una carga (15) suspendida por cables de una carretilla (10) , que es móvil al menos según un eje (X, Y) horizontal, en un aparato de elevación, siendo el procedimiento puesto en practica mediante un dispositivo (20) de regulación, de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el procedimiento de regulación comprende una etapa de cálculo que permite determinar un ángulo (Өx, Өy) de oscilación de la carga (15) y una velocidad (Ө’x, Ө’y) del ángulo de oscilación utilizando únicamente como únicas variables de entrada la longitud (L) de los cables (14) de suspensión de la carga (15) y un
dato representativo de una velocidad (Vx, Vy) de desplazamiento de la carretilla, y utilizando una aceleración (Ө”x, Ө”y) de dicho ángulo (Өx, Өy) de oscilación como variable interna.
13. Procedimiento de regulación de acuerdo con la reivindicación 12, caracterizado porque el procedimiento de regulación calcula el ángulo (Өx, Өy) de oscilación con la ayuda de un proceso iterativo utilizando la velocidad (Ө’x, 5 Ө’y) de dicho ángulo (Өx, Өy) de oscilación y de la aceleración (Ө”x, Ө”y) de dicho ángulo (Өx, Өy) de oscilación.
14. Procedimiento de regulación de acuerdo con la reivindicación 12, caracterizado porque la velocidad (Vx, Vy) de desplazamiento de la carretilla se determina a partir de una referencia de velocidad (Vrx, Vr y ) de desplazamiento de la carretilla.
15. Procedimiento de regulación de acuerdo con la reivindicación 12, caracterizado porque el procedimiento de
regulación comprende una etapa de corrección que permite proporcionar una señal de corrección de velocidad (ΔVx, ΔVy) a partir de los valores determinados del ángulo (Өx, Өy) de oscilación y de la velocidad (Ө’x, Ө’y) del ángulo de oscilación, siendo calculada la señal (ΔVx, ΔVy) de corrección aplicando un coeficiente (KӨx, K’Өx, KӨy, K’Өy) de corrección al ángulo (Өx, Өy) de oscilación calculado y a la velocidad (Ө’x, Ө’y) calculada del ángulo de oscilación.
16. Procedimiento de regulación de acuerdo con la reivindicación 15, caracterizado porque los coeficientes (KӨx, 15 K’Өx, KӨy, K’Өy) son variables en función de la longitud (L) de los cables (14) de suspensión de la carga (15) .
17. Procedimiento de regulación de acuerdo con la reivindicación 12, caracterizado porque la etapa de cálculo utiliza un modelo matemático de péndulo con amortiguación.
Patentes similares o relacionadas:
Dispositivo elevador para subir y bajar objetos pesados, del 3 de Junio de 2020, de Mohr Lizenz Verwaltungs GmbH: Dispositivo elevador para subir y bajar objetos, en particular objetos pesados, que comprende dos disposiciones de marco situados […]
Carretillas pórtico para el uso en terminales de contenedores y para otras finalidades de transporte, del 1 de Enero de 2020, de Pfenning Elektroanlagen GmbH: Carretilla pórtico para el uso en terminales de contenedores y para otras finalidades de transporte, con un bastidor , un dispositivo de elevación , que cuelga […]
 Dispositivo y procedimiento para controlar una oscilación de una carga suspendida en un aparato de elevación, del 25 de Septiembre de 2019, de VINATI S.R.L: Un dispositivo para controlar una oscilación de una carga de masa m suspendida desde un elemento motorizado deslizable que puede moverse a lo largo de un eje sustancialmente […]
Dispositivo y procedimiento para controlar una oscilación de una carga suspendida en un aparato de elevación, del 25 de Septiembre de 2019, de VINATI S.R.L: Un dispositivo para controlar una oscilación de una carga de masa m suspendida desde un elemento motorizado deslizable que puede moverse a lo largo de un eje sustancialmente […]
SISTEMAS Y MÉTODOS DE ESTABILIDAD DE CARGA SUSPENDIDA, del 15 de Agosto de 2019, de VITA INCLINATA TECHNOLOGIES, INC: 1. Un aparato de sistema de estabilidad de carga para estabilizar una carga suspendida a través de un cable desde arriba , comprendiendo […]
Unidad de transporte, del 17 de Julio de 2019, de Hans Künz GmbH: Instalación de transporte para el transporte de al menos un contenedor o de otra carga, en la que la instalación de transporte presenta al menos un carro […]
Procedimiento de control de grúa antibalanceo con filtro de tercer orden, del 29 de Mayo de 2019, de MANITOWOC CRANE GROUP FRANCE: Procedimiento de desplazamiento de carga suspendida en un punto de unión de unión (H) de un equipo de elevación , comprendiendo dicho […]
Carretillas pórtico con tambor de cable individual, del 20 de Febrero de 2019, de Pfenning Elektroanlagen GmbH: Carretilla pórtico, con un bastidor , un equipo de manejo de la carga , que cuelga entre el bastidor y que se puede cerrar con una carga, preferentemente […]
Aparato y método para posicionar y orientar una carga, del 30 de Enero de 2019, de FUNDACION TECNALIA RESEARCH & INNOVATION: Un aparato para posicionar y orientar una carga, comprendiendo el aparato: - una estructura de soporte (101a, 101b, 101c) movible en una primera dirección, la estructura […]