DISPOSITIVO UTIL PARA LA GENERACION DE MAPAS DE CONTORNO Y SUS APLICACIONES.
Dispositivo útil para la generación de mapas de contorno y sus aplicaciones.
La presente invención describe un dispositivo útil para la generación de mapas de contorno que comprende un soporte abierto, cerrado o con cualquier forma, sobre el que sitúa una red de uno o más medidores de distancia puntuales dispuestos consecutivamente alrededor del perímetro de dicho soporte creando una zona o perímetro de medición cerrado y continuo. Este dispositivo puede acoplarse a un aparato, con o sin capacidad de movilidad, por ejemplo un robot manipulador de objetos, un robot detector de minas antipersonas, un sistema de direccionamiento de una persona ciega, un robot volador (como un quadrotor o helicóptero autónomo), etc
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200701732.
Solicitante: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: ARMADA RODRIGUEZ,MANUEL ANGEL, GONZALEZ DE SANTOS,PABLO, PONTICELLI,ROBERTO.
Fecha de Solicitud: 22 de Junio de 2007.
Fecha de Publicación: .
Fecha de Concesión: 11 de Marzo de 2010.
Clasificación Internacional de Patentes:
- G01B21/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 21/00 Disposiciones de medida o sus detalles en caso de no adaptarse a los tipos particulares de medios de medida de los otros grupos de esta subclase. › para la medida de contornos o curvaturas, p. ej. determinación de perfiles.
- G09B29/00 G […] › G09 ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS. › G09B MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS, SORDOS O MUDOS; MODELOS; PLANETARIOS; GLOBOS; MAPAS GEOGRAFICOS; DIAGRAMAS. › Mapas (mapas celestes G09B 27/04 ); Planos; Gráficos; Trayectorias, p. ej. trazado de carreteras.
Clasificación PCT:
Fragmento de la descripción:
Dispositivo útil para la generación de mapas de contorno y sus aplicaciones.
Sector de la técnica
El dispositivo de la presente invención se refiere a un sistema basado en una red de medidores puntuales de distancia configurados de tal modo que permiten la generación de mapas de contorno en tres dimensiones sin contacto con el entorno. Este dispositivo es útil para la navegación, en general, de vehículos y robots móviles en entornos con obstáculos y para el levantamiento de mapas del terreno en la navegación de robots caminantes y de personas.
Estado de la técnica
La detección de obstáculos en el camino de vehículos automáticos ha sido un tema de investigación que ha acaparado grandes esfuerzos de investigación. Estos sistemas han explotado diferentes conceptos sensoriales que han dado lugar a técnicas diversas que se han complementado en diferentes grados. Así, en los años ochenta y noventa pueden encontrarse ideas patentadas para el seguimiento del terreno utilizando diferentes técnicas de guiado (Patente CA1196711, "Terrain positioning tracking means and guidance sensor therefor", 1985, y Patente US4505441, "Terrain-following transient surface contact vehicle", 1985) o para el seguimiento de trayectorias con sensores para el nivelado de superficies (Patentes DE3827619 y DE3827620 ambas con el título "Sensor-controlled tracking device, especially for levelling of ground surfaces", 1990).
Recientemente, han aparecido nuevas patentes para evitación de obstáculos empleando dispositivos de contacto (Patente US2004112662, "Contact detecting device and vehicle mounting the same", 2004, o técnicas láser (Patentes US7133123, "Laser obstacle avoidance apparatus", 2006, y JP2005326944, "Device and method for generating map image by laser measurement", 2005).
Todas estas ideas ya han dado lugar a sistemas comerciales como el sistema de medición láser SICK fabricado por la empresa alemana Sick AG. Este sistema ofrece una gran precisión, pero resulta voluminoso, pesado y caro.
Los sistemas conocidos se basan en (a) dispositivos de contacto que suelen presentar problemas de interacción con el entorno, (b) dispositivos de no-contacto (láser, ultrasonidos, infra-rojos, microondas, etc.) que resultan ser voluminosos, pesados y fundamentalmente caros y (c) redes formadas por un gran número de medidores de distancia.
La idea básica de esta patente es la realización de un sistema para la generación de mapas de contorno tridimensionales, mucho más pequeño, ligero, y económico, pero sin llegar a las precisiones conseguidas por los dispositivos basados en sistemas láser y empleando un número reducido de medidores de distancia básicos.
Descripción de la invención
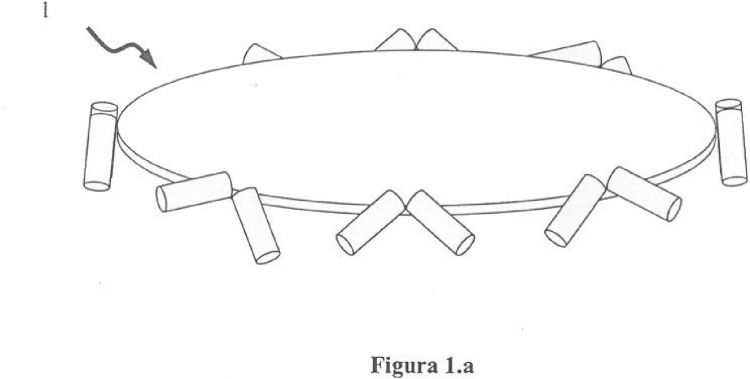
Un aspecto de la invención lo constituye un dispositivo útil para la generación de mapas de contorno, en adelante dispositivo de la invención, que comprende un soporte con cualquier forma, preferentemente forma circular, sobre el que sitúa una red de uno o más medidores de distancia puntuales dispuestos consecutivamente alrededor del perímetro de dicho soporte formando cada uno un ángulo con respecto a la tangente del perímetro, solapando la zona de medición de un medidor con la zona de medición de uno o más medidores adyacentes creando una zona o perímetro de medición cerrado y continuo que cubre la totalidad del perímetro y/o con otra serie de medidores dispuestos en cualquier ángulo con el plano del soporte.
Una realización preferente de la invención lo constituye el dispositivo de la invención cuyo soporte es circular con medidores de distancia de tipo infrarrojo. Parte de estos sensores están dispuestos en el plano del soporte y sobre su contorno formando 0º con la tangente al soporte. El resto de los sensores están dispuestos en planos perpendiculares al soporte y apuntando hacia abajo.
Otro aspecto de la invención lo constituye cualquier aparato que incluya el dispositivo de la invención, en adelante aparato de la invención, con o sin capacidad de movilidad, perteneciente, a título ilustrativo y sin que limite el alcance de la invención, al siguiente grupo: robot manipulador de objetos, por ejemplo un robot detector de minas antipersonas, un sistema de direccionamiento de una persona ciega, robot volador (por ejemplo: quadrotor o helicóptero autónomo), etc.
La presente invención se refiere a un dispositivo y al uso del mismo para la generación de mapas de contorno (elevación de terreno y mapas de obstáculos) tridimensionales aplicable, por ejemplo, a la navegación de vehículos y robots autónomos e, incluso, al desplazamiento de personas con minusvalías sin contacto con el entorno. La presente invención se basa en que los inventores han observado que una determinada disposición de una red limitada de sensores de medida de distancia, sin tener que apuntar necesariamente al objeto en la dirección del movimiento, permite crear un cinturón o área cerrada, alrededor del dispositivo o aparato al que esté unido.
Estos medidores de distancia (3) pueden situarse formando diferentes ángulos con el soporte de tal forma que sus haces (4) se cortan conformando un cinturón cerrado (5). Cuando este cinturón corta o intercepta un objeto del entorno, uno o varios medidores de distancia proporcionan la posición del punto de corte en el sistema de referencia del dispositivo (13), y un algoritmo genera un mapa local de elevación con las posiciones de los puntos detectados y medidos por los detectores de distancia. Si el dispositivo se mueve sobre una superficie es posible formar un mosaico con los mapas locales para formar un mapa del entorno barrido tri- o bidimensional.
Esta red de medidores puntuales se dispone alrededor del dispositivo de manera que es capaz de detectar y localizar respecto de un sistema de referencia (13) tanto los objetos que el dispositivo encuentre en su camino como la situación relativa del sensor al suelo. El dispositivo es pequeño, ligero y de bajo costo. Este dispositivo proporciona información zonal (de un área relativamente pequeña) y para la representación de mapas puede utilizarse, por ejemplo, conjuntamente con un sistema móvil, estando indicados para la navegación, en general, de vehículos y robots móviles en entornos con obstáculos; el levantamiento de mapas del terreno en la navegación de robots móviles y el barrido de zonas con sensores utilizando manipuladores, como es el caso de la detección de minas antipersonas.
Así, un aspecto de la invención lo constituye un dispositivo útil para la generación de mapas de contorno, en adelante dispositivo de la invención, que comprende un soporte abierto, cerrado o con cualquier forma, preferentemente forma circular, sobre el que sitúa una red de uno o más medidores de distancia puntuales dispuestos consecutivamente alrededor del perímetro de dicho soporte formando cada uno un ángulo con respecto a la tangente del perímetro, solapando la zona de medición de un medidor con la zona de medición de uno o más medidores adyacentes creando una zona o perímetro de medición cerrado y continuo que cubre la totalidad del perímetro y/o con otra serie de medidores dispuestos en cualquier ángulo con el plano del soporte.
Un aspecto preferente de la invención lo constituye el dispositivo de la invención en el que el soporte o plataforma presenta una forma circular.
Otro aspecto preferente de la invención lo constituye el dispositivo de la invención en el que el soporte o plataforma presenta una forma poligonal. En este último caso, la superficie del soporte es dividida en sectores menores a partir de los cuales se puede calcular la disposición de los medidores de distancia para cada caso.
Otro aspecto preferente de la invención lo constituye el dispositivo de la invención en el que los medidores de distancia se disponen en un plano horizontal, vertical (superior o inferior) o en ambas disposiciones. Con esta última disposición de medidores el dispositivo puede controlar movimientos en un plano horizontal o vertical por separado o de forma conjunta, creándose de esta forma una malla de haces cruzados alrededor y en la parte inferior del soporte, conformando de esta manera un cinturón cerrado a lo largo del perímetro del soporte.
Otro aspecto preferente de la invención lo constituye el dispositivo de la invención en el que los medidores de distancia se disponen formando diferentes ángulos y configuraciones con el soporte, por ejemplo, a título ilustrativo...
Reivindicaciones:
1. Dispositivo útil para la generación de mapas de contorno caracterizado porque comprende un soporte con cualquier forma, preferentemente forma circular, sobre el que sitúa una red de uno o más medidores de distancia puntuales dispuestos consecutivamente alrededor del perímetro de dicho soporte formando cada uno un ángulo con respecto a la tangente del perímetro, solapando la zona de medición de un medidor con la zona de medición de uno o más medidores adyacentes creando una zona o perímetro de medición cerrado y continuo que cubre la totalidad del perímetro y/o con otra serie de medidores dispuestos en cualquier ángulo con el plano del soporte.
2. Dispositivo según la reivindicación 1 caracterizado porque el soporte o plataforma presenta una forma circular.
3. Dispositivo según la reivindicación 1 caracterizado porque el soporte o plataforma presenta una forma poligonal.
4. Dispositivo según la reivindicación 1 caracterizado porque los medidores de distancia se disponen en un plano horizontal, vertical (superior o inferior) o en ambas disposiciones.
5. Dispositivo según la reivindicación 1 caracterizado porque los medidores de distancia se disponen formando diferentes ángulos con el soporte y con una configuración perteneciente al siguiente grupo:
- i) una configuración con los medidores en parejas de manera que los haces del sensor sean opuestos, y
- ii) una configuración en la que la red de medidores de distancia se disponen en dos subredes: horizontal y vertical.
6. Dispositivo según la reivindicación 1 caracterizado porque los medidores de distancia pertenecen al siguiente grupo: medidores por ultrasonidos, infrarrojos, microondas, sensores resistivos flexibles y láser.
7. Dispositivo según reivindicación 1 caracterizado porque el soporte es circular y está dotado de medidores de distancia de tipo infrarrojo, parte de los cuales están dispuestos en el plano del soporte y sobre su contorno formando 0º con la tangente al soporte, y el resto de los sensores están dispuestos en planos perpendiculares al soporte y apuntando hacia abajo.
8. Dispositivo según la reivindicación 8, caracterizado porque el aparato está seleccionado entre un robot manipulador de objetos, un sistema de direccionamiento de una persona ciega y un robot volador.
Patentes similares o relacionadas:
Procedimiento y aparato para la presentación optimizada de mapas complejos, del 6 de Marzo de 2019, de QUALCOMM INCORPORATED: Un procedimiento para la presentación optimizada del mapa que comprende: recibir, en un dispositivo móvil, un primer conjunto de datos […]
CARTA SOLAR TRIDIMENSIONAL UNIVERSAL, del 17 de Mayo de 2018, de UNIVERSIDAD DE ALICANTE: Carta solar tridimensional universal que permite el estudio del soleamiento de la tierra y que comprende una pieza fija y una pieza móvil, donde la […]
Procedimiento de generación de información de tráfico, aparato de generación de información de tráfico, sistema de navegación, de visualización y unidad electrónica de control, del 31 de Mayo de 2017, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un procedimiento de generación de información de tráfico para generar información de tráfico acerca de una carretera en la que viaja un vehículo , comprendiendo el procedimiento: […]
CARTA SOLAR TRIDIMENSIONAL UNIVERSAL, del 11 de Abril de 2017, de UNIVERSIDAD DE ALICANTE: 1. Carta solar tridimensional universal caracterizada por comprender una pieza fija y una pieza móvil, donde la pieza fija es una plataforma graduada circular con […]
 Guía para campo golf, del 9 de Febrero de 2016, de Ulrich, Franz: Guía para campo de golf con planos de información fieles a la escala de las calles individuales para la orientación sobre las peculiaridades y […]
Guía para campo golf, del 9 de Febrero de 2016, de Ulrich, Franz: Guía para campo de golf con planos de información fieles a la escala de las calles individuales para la orientación sobre las peculiaridades y […]
 Anotación automatizada de una vista, del 2 de Febrero de 2016, de QUALCOMM INCORPORATED: Un procedimiento informatizado para anotar un elemento de una imagen de una vista de una secuencia de vídeo, que comprende las etapas de:
(a) obtener una identificación […]
Anotación automatizada de una vista, del 2 de Febrero de 2016, de QUALCOMM INCORPORATED: Un procedimiento informatizado para anotar un elemento de una imagen de una vista de una secuencia de vídeo, que comprende las etapas de:
(a) obtener una identificación […]
Procedimiento para la determinación de las coordenadas geográficas de píxeles en imágenes SAR, del 3 de Diciembre de 2014, de Airbus Defence and Space GmbH: Procedimiento para la determinación aeroasistida de las coordenadas geográficas de píxeles correspondientes a partir de imágenes de radar de abertura sintética digital, […]
Mapas adaptados para personas ciegas y deficientes visuales, del 26 de Mayo de 2014, de ORGANIZACION NACIONAL DE CIEGOS ESPAÑOLES (ONCE): 1. Mampara adaptados para personas ciegas y deficientes visuales de cualquier tamaño, forma, diseño, color y orientación, caracterizados porque incorporan marcas táctiles […]