Procedimiento para la determinación de las coordenadas geográficas de píxeles en imágenes SAR.
Procedimiento para la determinación aeroasistida de las coordenadas geográficas de píxeles correspondientes a partir de imágenes de radar de abertura sintética digital,
en el que las imágenes SAR están presentes como imágenes de alcance oblicuo y se conoce la posición de registro de la imagen SAR respectiva, en el que a partir de las coordenadas de los píxeles correspondientes en las imágenes SAR y los intervalos de alcance correspondientes se determina, respectivamente, la distancia entre una célula de resolución correspondiente en el suelo y en la posición de registro de la imagen SAR respectiva, caracterizado por que a partir de las distancias calculadas y las posiciones de registro correspondientes de las imágenes SAR utilizando un elipsoide WGS84 se determinan las coordenadas geográficas de los píxeles correspondientes en las imágenes SAR.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2010/000683.
Solicitante: Airbus Defence and Space GmbH.
Nacionalidad solicitante: Alemania.
Dirección: Willy-Messerschmitt-Strasse 1 85521 Ottobrunn ALEMANIA.
Inventor/es: BENNINGHOFEN,BENJAMIN, KOBAN,TAMER, STAHL,CHRISTOPH.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/90 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › que utilizan técnicas de apertura sintética.
- G01S7/295 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Medios para la transformación de coordenadas o para la evaluación de datos, p. ej. utilizando ordenadores.
- G09B29/00 G […] › G09 ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS. › G09B MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS, SORDOS O MUDOS; MODELOS; PLANETARIOS; GLOBOS; MAPAS GEOGRAFICOS; DIAGRAMAS. › Mapas (mapas celestes G09B 27/04 ); Planos; Gráficos; Trayectorias, p. ej. trazado de carreteras.
PDF original: ES-2530264_T3.pdf
Fragmento de la descripción:
Procedimiento para la determinación de las coordenadas geográficas de píxeles en imágenes SAR
La invención se refiere a un procedimiento para la determinación de las coordenadas geográficas de píxeles en imágenes SAR de acuerdo con las características de la reivindicación 1 de la patente.
La determinación de la posición de un objetivo desde distancias grandes (20 km â?" 100 km) es con frecuencia inexacta en el caso de utilización de imágenes SAR en virtud de errores en las imágenes SAR. Los errores en las imágenes SAR proceden típicamente de errores acimutales y de efectos de distorsión (artefactos, parada) .
Se conoce a partir del documento US 5.659.318 A un procedimiento interferométrico, en el que con la ayuda del alcance oblicuo generado por dos antenas SAR separadas en el espacio se evalúan imágenes de una región de destino con respecto a su diferencia de fases y en el que en coincidencia con el preámbulo de la reivindicación 1 de la patente vigente se conoce la posición de registro de las imágenes SAR.
En primer lugar se explica brevemente la determinación de coordenadas conocidas de un destino a partir de una imagen SAR:
La base es el llamado elipsoide WGS84. El Sistema Geodésico Mundial 1984 (WGS 84) es un sistema de referencia geodésico como base unitaria para indicaciones de la posición sobre la tierra y en el espacio próximo a la tierra. Está constituido por -una superficie de referencia tridimensional sencilla, el elipsoide de referencia, que está adaptada de manera aproximada a la superficie de la tierra , -un modelo más detallado para la imagen de la tierra que se desvía de esta forma idealizada, el llamado geoide, -doce estaciones fundamentales distribuidas sobre la tierra, a través de las cuales se define la relación entre estos modelos y la corteza terrestre a través de la indicación de coordenadas (en función del tiempo) (el llamado cuadro de referencia) .
El sistema es la base geodésica del Sistema de Posicionamiento Global (GPS) , que posibilita el dimensionado de la tierra y la orientación por medio de satélites adecuados (satélites NAVSTAR) .
En la figura 1 se definen las magnitudes más importantes en un SAR. En la imagen parcial a de la figura 1 se esboza una configuración típica SAR. La plataforma de sensores, por ejemplo un avión, se mueve a una altura h por encima del suelo con la velocidad v a lo largo del eje X. El radar irradia lateralmente una región sobre el suelo. En un SAR, la dirección de la visión óptima es 90º con relación a la dirección del vector de velocidad v. Las direcciones de la visión que se desvían de ella repercuten negativamente sobre la resolución así como sobre el gasto para la generación de imágenes SAR. El tamaño de la antena de radar corresponde a la abertura real. Para poder llevar consigo la antena de radar sobre la plataforma de sensores, aquélla es relativamente pequeña. El tamaño de la antena o bien la abertura determinan, sin embargo, la resolución. Cuanto mayor es la antena, tanto mejor es la resolución. Para conseguir una resolución alta a pesar de la antena pequeña se genera artificialmente una antena grande. Esto se realiza haciendo volar la plataforma de sensores a lo largo de la abertura de una antena grande imaginaria y acumulando los impulsos de radar reflejados en cada sección parcial de la abertura grande imaginaria. La plataforma de sensores debe volar, por lo tanto, sobre una abertura sintética para acumular los datos para una imagen SAR. Después del procesamiento SAR aparece a partir de los datos acumulados una imagen SAR. Sobre la imagen parcial b de la figura 1 se representan los parámetros SAR más importantes de nuevo con mayor exactitud. S designa la posición de la plataforma de sensores y el vector v designa la velocidad correspondiente. El sistema de coordenadas se selecciona de tal manera que v apunta a lo largo del eje-X positivo. El punto T se representa sobre el centro de la imagen SAR. La recta LOS (Línea de Visión) designa la línea de unión entre la posición S de la plataforma de sensores y el punto T. La longitud de la recta LOS corresponde al intervalo de alcance R del SAR. La proyección del vector de velocidad v sobre la recta LOS da como resultado la velocidad de aproximación radial vr de la plataforma de sensores en el punto T. El ángulo ï? entre el vector de velocidad v y la recta LOS se designa aquí con ángulo de estrabismo. La proyección de la recta LOS sobre un plano, que pasa a través del punto S y que está paralelo al plano-XY, da como resultado la recta HLOS (Línea de Visión Horizontal) . El ángulo ï?¥ entre LOS y HLOS se designa ángulo de elevación.
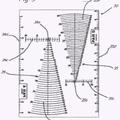
En la determinación de coordenadas habituales de un destino a partir de una imagen SAR se determina en primer lugar las coordenadas del punto medio de la imagen SAR. A continuación se calcula la coordenada de un pixel sobre la imagen SAR, que ha sido reconocido como destino. Para determinar las coordenadas del punto medio de la imagen se utilizan las magnitudes SAR indicadas anteriormente. En la imagen parcial a de la figura 2 se representan las magnitudes relevantes habitualmente para la determinación de coordenadas de un destino a partir de una imagen SAR. La plataforma de sensores S se encuentra a una altura H sobre el elipsoide WGS84, que se
representa aquí muy ampliado como plano. El vector de velocidad v define junto con el ángulo de estrabismo ï? y la distancia R (intervalo de alcance) con respecto al punto medio de la imagen un cono. Este cono determina la configuración SAR. La base del cono define un círculo con radio r = R sin (ï?) . La coordenada geométrica del punto medio de la imagen SAR se encuentra sobre el punto de intersección entre este círculo y la superficie de la tierra. En la imagen existen dos puntos, donde el círculo corta la superficie de la tierra. Pero puesto que se conoce en qué dirección mira el sensor SAR, se puede excluir, como se conoce, un punto de intersección.
Después de que ha sido calculada la coordenada geográfica P0 del punto medio de la imagen SAR, se calcula ahora la coordenada geográfica de un pixel reconocido como destino en la imagen SAR. Las magnitudes importantes en este caso se esbozan en la imagen parcial b de la figura 2. A tal fin, se calculan los vectores tangenciales locales nr y ncr en el elipsoide WGS84 en el punto P0. Puesto que las coordenadas de píxeles px y py con relación al punto medio de la imagen SAR se conocen, con la ayuda de las resoluciones ï?xy ï?y se puede calcular el vector de desplazamiento d desde el punto P0 hasta el punto que corresponde al pixel de la siguiente manera:
** (Ver fórmula) **
A partir de las coordenadas geométricas del punto medio de la imagen Po y del vector de desplazamiento d se puede calcular entonces a través de simple adición de vectores la coordenada geográfica del pixel de destino. El cálculo de la coordenada geográfica del punto que corresponde al pixel es estado de la técnica y es conocido por un técnico medio.
En la determinación de coordenadas de un destino conocida a partir del estado de la técnica a partir de una imagen SAR, el cono descrito anteriormente determina las coordenadas del destino. La posición de este cono en el espacio se determina, sin embargo, con relación al vector de velocidad. Si este vector de velocidad no se conoce exactamente, entonces resulta un error en la determinación de las coordenadas. Este error puede ser, en el caso de los sistemas SAR convencionales en dirección acimutal la dirección del vector de velocidad, hasta 100 metros. Adicionalmente, después de la determinación de las coordenadas geográficas del punto medio de la imagen, se supone que el plano de destino es plano. Sin embargo, los efectos típicos SAR como artefactos o parada provocan un desplazamiento del pixel que corresponde al punto de destino, lo que da como resultado un error adicional durante el cálculo des vector de desplazamiento con respecto al destino-
Se conoce a partir de H. A. Malliot: "Gecoding the DTEMS digital terrain matrix and radar image products", Aerospace Conference â?97, Aspen, 1 Febrero 1997, LNKD-DOI:10.1109/AERO. 1997.577496, Vol. 4, páginas 35-37, XP010214686, ISB: 978-0-7803-3741-1 un procedimiento, en el que por medio de una imagen SAR y del elipsoide WGS84 se calculan las coordenadas geográficas.
Se conoce a partir de G. Nico: "Exact Closed-Form Geolocation for SAR Interferometr y ", IEEE Transaction on Geoscience and Remote Sensing, Vol. 40, Nr.1, 1 Enero 2002, XP011021925, ISSN:0196-2892 un procedimiento correspondiente, en el que se utiliza un procedimiento del tipo indicado al principio, en el que para la determinación de las coordenadas geográficas de píxeles correspondientes a partir... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la determinación aeroasistida de las coordenadas geográficas de píxeles correspondientes a partir de imágenes de radar de abertura sintética digital, en el que las imágenes SAR están presentes como imágenes de alcance oblicuo y se conoce la posición de registro de la imagen SAR respectiva, en el que a partir de las coordenadas de los píxeles correspondientes en las imágenes SAR y los intervalos de alcance correspondientes se determina, respectivamente, la distancia entre una célula de resolución correspondiente en el suelo y en la posición de registro de la imagen SAR respectiva, caracterizado por que a partir de las distancias calculadas y las posiciones de registro correspondientes de las imágenes SAR utilizando un elipsoide WGS84 se determinan las coordenadas geográficas de los píxeles correspondientes en las imágenes SAR.
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado por que para la determinación de las coordenadas geográficas de píxeles correspondientes se utiliza una altura media predeterminada para una imagen SAR de una región de destino.
3. Procedimiento de acuerdo con la reivindicación 1, caracterizado por que para la determinación de las coordenadas geográficas de píxeles correspondientes se utiliza una tarjeta de alturas predeterminada para una imagen SAR.
4. Procedimiento de acuerdo con una de las reivindicaciones anteriores, caracterizado por que para la determinación de las coordenadas geográficas de píxeles correspondientes a partir de imágenes de radar de abertura sintética digital se utilizan dos o tres imágenes SAR.
Patentes similares o relacionadas:
Procedimiento y aparato para la presentación optimizada de mapas complejos, del 6 de Marzo de 2019, de QUALCOMM INCORPORATED: Un procedimiento para la presentación optimizada del mapa que comprende: recibir, en un dispositivo móvil, un primer conjunto de datos […]
CARTA SOLAR TRIDIMENSIONAL UNIVERSAL, del 17 de Mayo de 2018, de UNIVERSIDAD DE ALICANTE: Carta solar tridimensional universal que permite el estudio del soleamiento de la tierra y que comprende una pieza fija y una pieza móvil, donde la […]
Procedimiento de generación de información de tráfico, aparato de generación de información de tráfico, sistema de navegación, de visualización y unidad electrónica de control, del 31 de Mayo de 2017, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un procedimiento de generación de información de tráfico para generar información de tráfico acerca de una carretera en la que viaja un vehículo , comprendiendo el procedimiento: […]
CARTA SOLAR TRIDIMENSIONAL UNIVERSAL, del 11 de Abril de 2017, de UNIVERSIDAD DE ALICANTE: 1. Carta solar tridimensional universal caracterizada por comprender una pieza fija y una pieza móvil, donde la pieza fija es una plataforma graduada circular con […]
 Guía para campo golf, del 9 de Febrero de 2016, de Ulrich, Franz: Guía para campo de golf con planos de información fieles a la escala de las calles individuales para la orientación sobre las peculiaridades y […]
Guía para campo golf, del 9 de Febrero de 2016, de Ulrich, Franz: Guía para campo de golf con planos de información fieles a la escala de las calles individuales para la orientación sobre las peculiaridades y […]
 Anotación automatizada de una vista, del 2 de Febrero de 2016, de QUALCOMM INCORPORATED: Un procedimiento informatizado para anotar un elemento de una imagen de una vista de una secuencia de vídeo, que comprende las etapas de:
(a) obtener una identificación […]
Anotación automatizada de una vista, del 2 de Febrero de 2016, de QUALCOMM INCORPORATED: Un procedimiento informatizado para anotar un elemento de una imagen de una vista de una secuencia de vídeo, que comprende las etapas de:
(a) obtener una identificación […]
Mapas adaptados para personas ciegas y deficientes visuales, del 26 de Mayo de 2014, de ORGANIZACION NACIONAL DE CIEGOS ESPAÑOLES (ONCE): 1. Mampara adaptados para personas ciegas y deficientes visuales de cualquier tamaño, forma, diseño, color y orientación, caracterizados porque incorporan marcas táctiles […]
DISPOSITIVO COLGANTE PARA DOCUMENTO INFORMATIVO, del 26 de Septiembre de 2011, de VAZQUEZ PRADO,CARLOS: 1. Dispositivo colgante para documento informativo, como por ejemplo un plano, guía, mapa o similar , preferiblemente desplegable, […]