PROCEDIMIENTO DE CONTROL DE UN MOTOR ELECTRICO DE UN DISPOSITIVO DE ASISTENCIA DE DIRECCION DE VEHICULO, Y DISPOSITIVO DE ASISTENCIA ASOCIADO.
Procedimiento de control de un motor eléctrico del dispositivo de asistencia eléctrica de un dispositivo eléctrico de asistencia de dirección de vehículo automóvil,
estando previsto el motor para proporcionar un par de asistencia al giro, procedimiento en el cual, en cada instante:
- se calcula un valor de consigna motriz en función de un primer conjunto (P1, P2) de parámetros de funcionamiento y/o de estado del vehículo,
- se calcula un valor de consigna motriz (C-) en función de un segundo conjunto (P1, P2, P3) de parámetros de funcionamiento y/o de estado del vehículo,
- se calcula un valor de consigna de par de asistencia (C) que resulta del valor de consigna motriz (C+) y del valor de consigna de amortiguamiento (C-),
- se determina de manera secuencial el modo de funcionamiento de la dirección entre un modo de, funcionamiento normal y un modo de funcionamiento en movimiento pendular, y se calcula el valor de consigna de amortiguamiento (C-) en cada instante, en función del modo determinado, selectivamente por medio de primeras leyes previamente registradas o de segundas leyes previamente registradas distintas de las primeras.
caracterizado porque se determina el modo de funcionamiento de la dirección observando la evolución con el tiempo de un parámetro (P3), significativo de la velocidad del volante, de un parámetro (P1), significativo del par del volante, de la derivada respecto al tiempo (P1'') de éste último, y de un parámetro (P2), significativo de la velocidad del vehículo
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2006/050901.
Solicitante: PEUGEOT CITROËN AUTOMOBILES S.A..
Nacionalidad solicitante: Francia.
Dirección: ROUTE DE GISY,78140 VELIZY VILLACOUBLAY.
Inventor/es: BERNEDE, DOMINIQUE, GEORGELIN,VIVIAN.
Fecha de Publicación: .
Fecha Concesión Europea: 6 de Enero de 2010.
Clasificación Internacional de Patentes:
- B62D5/04P2H
Clasificación PCT:
- B62D5/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 5/00 Dirección asistida o de relé de potencia (para ruedas no orientables B62D 11/00; servomotores de fluido bajo presión en general F15B). › eléctrica, p. ej. utilizando un servomotor eléctrico conectado o que forma parte del mecanismo de dirección.
Fragmento de la descripción:
Procedimiento de control de un motor eléctrico de un dispositivo de asistencia de dirección de vehículo, y dispositivo de asistencia asociado.
La invención se refiere a un procedimiento de control de un motor eléctrico de un dispositivo de asistencia eléctrico de dirección de vehículo automóvil, estando previsto el motor para proporcionar un par de asistencia al giro.
Se refiere más concretamente a un procedimiento en el cual, en cada instante:
- se calcula un valor de consigna motriz en función de un primer conjunto de parámetros de funcionamiento y/o de estado del vehículo,
- se calcula un valor de consigna de amortiguamiento en función de un segundo conjunto de parámetros de funcionamiento y/o de estado del vehículo, y
- se calcula un valor de consigna de par de asistencia que resulta del valor de consigna motriz y del valor de consigna de amortiguamiento
- se determina de manera secuencial el modo de funcionamiento de la dirección entre un modo de, funcionamiento normal y un modo de funcionamiento en movimiento pendular, y se calcula el valor de consigna de amortiguamiento (C-) en cada instante, en función del modo determinado, selectivamente por medio de primeras leyes previamente registradas o de segundas leyes previamente registradas distintas de las primeras.
La solicitud de patente francesa Nº 02.12 488, por ejemplo, describe un procedimiento de control conocido de este tipo.
Un procedimiento de este tipo permite entregar una consigna de par de asistencia que se adapte tanto a casos de movimiento pendular como a condiciones de volante sostenido, preservando un nivel óptimo de seguridad y de aceptación de conducción.
Se recuerda que una situación de movimiento pendular se produce cuando, a partir de una trayectoria en línea recta a velocidad relativamente elevada, se lanza el volante de dirección de manera brusca en un sentido o en otro a partir de su posición neutra, y se suelta a continuación. Esta situación se produce por ejemplo durante una maniobra brusca de evitación.
El comportamiento natural del vehículo, en ausencia de dirección asistida, consiste en describir oscilaciones amortiguadas en torno a su trayectoria rectilínea inicial.
Es imprescindible que el dispositivo de asistencia eléctrica no haga divergente el comportamiento del vehículo con respecto a su trayectoria inicial rectilínea. Es además deseable que el número de oscilaciones, antes de la estabilización en la trayectoria inicial, sea pequeño.
La primera condición anterior se cumple en los sistemas de dirección asistida eléctrica potentes, tal como se describe en el documento FR 02.12 488 publicado como FR 2.832.376.
La invención tiene por objetivo optimizar los resultados de la dirección asistida vinculados a la segunda condición, mediante la elaboración de un procedimiento de control que permita estabilizar rápidamente el vehículo en su trayectoria inicial que precedía a la maniobra de evitación.
A tal efecto, la invención tiene por objeto un método de control del tipo antes citado, en el cual
- se determina el modo de funcionamiento de la dirección observando la evolución con el tiempo de un parámetro P3, significativo de la velocidad del volante, de un parámetro P1, significativo del par del volante, de la derivada respecto al tiempo de éste último, y de un parámetro P2, significativo de la velocidad del vehículo.
Según otras características, opcionales, del procedimiento de la invención:
- se determina que el modo de funcionamiento es por defecto el modo de funcionamiento normal, y que el modo de funcionamiento en movimiento pendular se produce por un período de tiempo predeterminado, con lo cual se activa una función de detección de movimiento pendular, y se observa la secuencia siguiente de acontecimientos:
a) el valor del parámetro significativo de la velocidad del volante, es en un primer instante, superior en valor absoluto a un primer valor de umbral predeterminado,
b) el valor del parámetro significativo de la velocidad del volante, en un segundo instante posterior al primer instante, se hace inferior en valor absoluto a un segundo valor de umbral predeterminado,
c) en un tercer instante, en un primer tiempo predeterminado a partir del segundo instante, el valor del parámetro significativo de la velocidad del volante pasa a ser, en valor absoluto, superior a un tercer valor de umbral predeterminado, y de signo diferente al del mismo parámetro en el primer instante, y
d) después de una espera predeterminada, en un cuarto instante en un segundo tiempo predeterminado a partir del final de dicha espera, se satisfacen todas las condiciones siguientes:
- el valor absoluto del parámetro significativo de par del volante es inferior a un cuarto valor de umbral predeterminado,
- el valor absoluto de la derivada respecto al tiempo del parámetro P1 significativo del par del volante es inferior a un quinto valor de umbral predeterminado, y
- el valor del parámetro significativo de la velocidad del vehículo es superior a un sexto valor de umbral predeterminado.
La invención tiene igualmente por objeto un dispositivo de asistencia eléctrica de dirección de vehículo automóvil, que comprende un motor eléctrico previsto para proporcionar un par de asistencia al giro, y un dispositivo de control previsto para proporcionar al motor una señal de consigna de par de asistencia que resulta de un valor de consigna motriz y de un valor de consigna de amortiguamiento, incluyendo dicho dispositivo de control
- unos medios principales de cálculo que calculan en cada instante el valor de consigna motriz en función de un primer conjunto de parámetros de funcionamiento y/o de estado del vehículo, y
- unos medios secundarios de cálculo que calculan en cada instante el valor de consigna de amortiguamiento en función de un segundo conjunto de parámetros de funcionamiento y/o de estado del vehículo,
- unos primeros y segundos medios de cálculo de valor de consigna de amortiguamiento, asociados respectivamente a un modo de funcionamiento normal y a un modo de funcionamiento en movimiento pendular de la dirección, y que pueden ser activados de manera selectiva para calcular y proporcionar dicho valor de consigna de amortiguamiento, y
- unos medios de selección, adaptados para determinar de manera secuencial el modo de funcionamiento de la dirección entre el modo de funcionamiento normal y el modo de funcionamiento en movimiento pendular, y para activar en cada instante, en función del modo determinado, selectivamente los primeros o los segundos medios de cálculo,
caracterizado porque:
el segundo conjunto de parámetros incluye un parámetro significativo de la velocidad del volante, un parámetro significativos del par del volante, un parámetro significativo de la derivada respecto al tiempo de éste último y un parámetro significativo de la velocidad del vehículo.
A continuación se describe con más detalle un modo particular de realización de la invención haciendo referencia a los dibujos anexos, en los cuales:
- la Figura 1 es una vista esquemática de un conjunto de dirección de vehículo, que incluye un dispositivo eléctrico de asistencia según la invención;
- la Figura 2 es un esquema de funcionamiento del dispositivo de control de la Figura 1, representativo de un procedimiento conforme a la invención;
- la Figura 3 es un esquema de funcionamiento de los medios secundarios de cálculo de la Figura 2; y
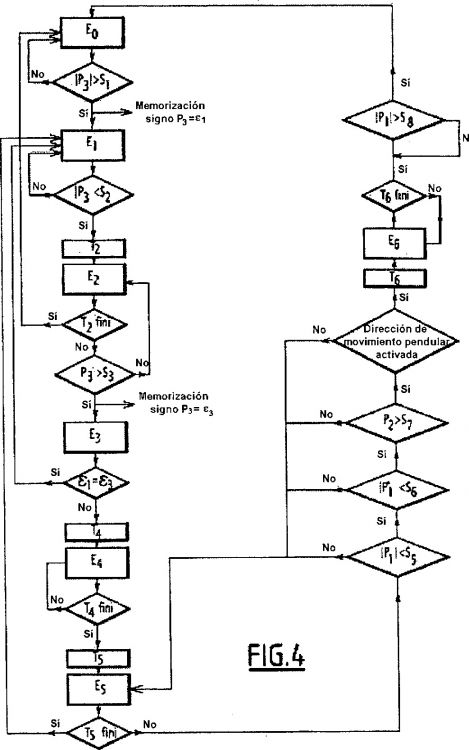
- la Figura 4 es un esquema lógico, que ilustra más precisamente la determinación secuencial del modo de funcionamiento de la dirección en un procedimiento conforme a la invención.
En la Figura 1, se ha representado un conjunto de dirección 1 de vehículo automóvil asistido eléctricamente, que incluye un volante 2 solidario con una primera sección 3 de un árbol de dirección 4, por medio de una conexión de cardán 6. El árbol de dirección 4 transmite el par aplicado al volante 2 por el conductor del vehículo a un piñón de transmisión 7, que engrana con una cremallera 8 dispuesta transversalmente con respecto al eje del vehículo entre dos ruedas directrices 9. El piñón de transmisión 7 podría ser sustituido por cualquier otro órgano de transmisión, como por ejemplo...
Reivindicaciones:
1. Procedimiento de control de un motor eléctrico del dispositivo de asistencia eléctrica de un dispositivo eléctrico de asistencia de dirección de vehículo automóvil, estando previsto el motor para proporcionar un par de asistencia al giro, procedimiento en el cual, en cada instante:
- se calcula un valor de consigna motriz en función de un primer conjunto (P1, P2) de parámetros de funcionamiento y/o de estado del vehículo,
- se calcula un valor de consigna motriz (C-) en función de un segundo conjunto (P1, P2, P3) de parámetros de funcionamiento y/o de estado del vehículo,
- se calcula un valor de consigna de par de asistencia (C) que resulta del valor de consigna motriz (C+) y del valor de consigna de amortiguamiento (C-),
- se determina de manera secuencial el modo de funcionamiento de la dirección entre un modo de, funcionamiento normal y un modo de funcionamiento en movimiento pendular, y se calcula el valor de consigna de amortiguamiento (C-) en cada instante, en función del modo determinado, selectivamente por medio de primeras leyes previamente registradas o de segundas leyes previamente registradas distintas de las primeras.
caracterizado porque se determina el modo de funcionamiento de la dirección observando la evolución con el tiempo de un parámetro (P3), significativo de la velocidad del volante, de un parámetro (P1), significativo del par del volante, de la derivada respecto al tiempo (P1') de éste último, y de un parámetro (P2), significativo de la velocidad del vehículo.
2. Procedimiento según la reivindicación 1, caracterizado porque se determina que el modo de funcionamiento es por defecto el modo de funcionamiento normal, y que el modo de funcionamiento en movimiento pendular se produce por un período de tiempo predeterminado, con lo cual se activa una función de detección de movimiento pendular, y se observa la secuencia siguiente de acontecimientos:
a) el valor del parámetro (P3) significativo de la velocidad del volante, es en un primer instante, superior en valor absoluto a un primer valor de umbral (S1) predeterminado,
b) el valor del parámetro (P3) significativo de la velocidad del volante, en un segundo instante posterior al primer instante, se hace inferior en valor absoluto a un segundo valor de umbral (S2) predeterminado,
c) en un tercer instante, en un primer tiempo predeterminado a partir del segundo instante, el valor del parámetro (P3) significativo de la velocidad del volante pasa a ser, en valor absoluto, superior a un tercer valor de umbral (S3) predeterminado, y de signo diferente al del mismo parámetro (P3) en el primer instante, y
d) después de una espera (T4) predeterminada, en un cuarto instante en un segundo tiempo (T5) predeterminado a partir del final de dicha espera (T4), se satisfacen todas las condiciones siguientes:
- el valor absoluto del parámetro (P1) significativo del par del volante es inferior a un cuarto valor de umbral (S5) predeterminado,
- el valor absoluto de la derivada respecto al tiempo del parámetro (P1) significativo del par del volante es inferior a un quinto valor de umbral (S6) predeterminado, y
- el valor del parámetro (P2) significativo de la velocidad del vehículo es superior a un sexto valor de umbral predeterminado (S7).
3. Dispositivo de asistencia eléctrica de dirección de vehículo automóvil, que comprende un motor eléctrico (15) previsto para proporcionar un par de asistencia al giro, y uno dispositivo de control (16) previsto para proporcionar al motor (15) una señal de consigna de par de asistencia (C) que resulta de un valor de consigna motriz (C+) y de un valor de consigna de amortiguamiento (C-), incluyendo dicho dispositivo de control (16)
- unos medios principales de cálculo (31) que calculan en cada instante el valor de consigna motriz (C+) en función de un primer conjunto de parámetros de funcionamiento y/o de estado del vehículo, y
- unos medios secundarios de cálculo (32) que calculan en cada instante el valor de consigna de amortiguamiento (C-) en función de un segundo conjunto de parámetros de funcionamiento y/o de estado del vehículo,
- dichos medios secundarios de cálculo (32) comprenden:
- unos primeros (41) y unos segundos (42) medios de cálculo de valor de consigna de amortiguamiento (C-), asociados respectivamente a un modo de funcionamiento normal y a un modo de funcionamiento en movimiento pendular de la dirección, y que pueden ser activados de manera selectiva para calcular y proporcionar dicho valor de consigna de amortiguamiento (C-), y
- unos medios de selección (43), adaptados para determinar de manera secuencial el modo de funcionamiento de la dirección entre el modo de funcionamiento normal y el modo de funcionamiento en movimiento pendular, y para activar en cada instante, en función del modo determinado, selectivamente los primeros (41) o los segundos (42) medios de cálculo,
caracterizado porque dicho segundo conjunto de parámetros está constituido por un parámetro (P3) significativo de la velocidad del volante, un parámetro (P1) significativo del par del volante, un parámetro (P'1) significativo de la derivada respecto al tiempo de éste último y un parámetro (P3) significativo de la velocidad del vehículo.
Patentes similares o relacionadas:
Estimación de la temperatura de una bobina, del 27 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Método para la estimación del incremento de temperatura perdido (TIncrementoPerdido) después de reiniciar un sistema para la estimación de la temperatura de una […]
Husillo de rosca de bolas de una dirección asistida electromecánica con cojinete de bolas de contacto angular integrado y compensación de diferentes dilataciones térmicas, del 13 de Mayo de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un vehículo de motor, con un servomotor que acciona un componente , desplazable axialmente, por medio de una tuerca […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Dispositivo de vigilancia externo con soporte de regeneración inversa integrado, del 1 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Un aparato de servodirección eléctrica para asistir a la dirección de un vehículo de motor al conferir par generado por un motor eléctrico a un mecanismo […]
Mecanismo de absorción de impactos de un motor de dirección, del 4 de Marzo de 2020, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un mecanismo de absorción de impactos de un motor de dirección, configurado para disponerse dentro del motor de dirección, y que comprende: un conjunto […]
Accionamiento de husillo, del 20 de Noviembre de 2019, de SFS INTEC HOLDING AG: Husillo roscado con una parte de accionamiento , que presenta un eje longitudinal (A) y está alojada a través de un primer cojinete , […]
Chasis de vehículo eléctrico y vehículo eléctrico que usa el mismo, del 13 de Noviembre de 2019, de Guangdong Hua'chan Research Institute of Intelligent Transportation System Co., Ltd: Un chasis de vehículo eléctrico que comprende un sistema de bastidor , un sistema de amortiguación de motor de dirección montado en el sistema de bastidor […]
Dispositivo para generar una fuerza auxiliar en un sistema de dirección de un automóvil, del 23 de Octubre de 2019, de THYSSENKRUPP PRESTA AG: Dispositivo para aplicar una fuerza auxiliar en un sistema de dirección de automóvil, que comprende un tornillo helicoidal de accionamiento conectable […]