ROBOT Y PROCEDIMIENTO DE REGISTRO DE UN ROBOT.
Un robot (40), estando el robot provisto de un brazo controlable (43,
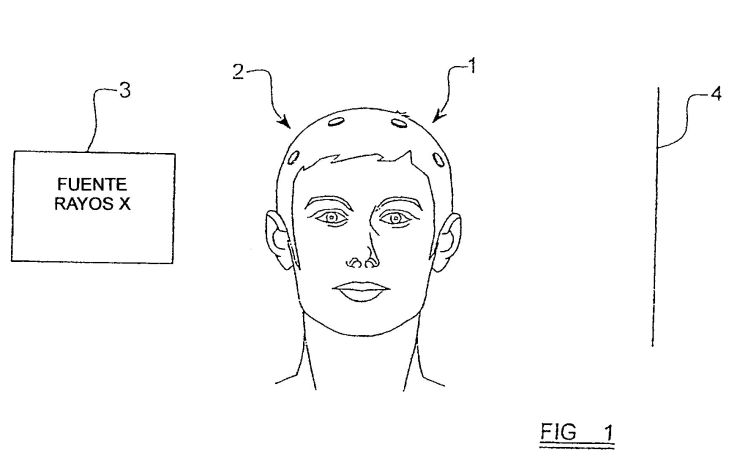
44) para portar un instrumento o una herramienta (46), caracterizado porque el robot (40) está provisto de un dispositivo (45) de adquisición de imágenes visuales para obtener imágenes visuales de una pieza de trabajo (1) incluyendo imágenes de unos marcadores (2) y un indicador (22) presentes en la pieza de trabajo (1), y porque el robot (40) incorpora un procesador para procesar las imágenes, estando configurado el procesador para determinar la posición de los marcadores (2) dentro de un sistema de referencia espacial del robot (40) para determinar la posición de la pieza de trabajo (1) dentro del sistema de referencia espacial del robot (40) y para controlar el robot (40) para llevar a cabo movimientos predeterminados de un instrumento o herramienta (46) portado por el brazo (43, 44) con respecto a la pieza de trabajo (1) estando el procesador así mismo configurado para determinar la posición de dicho indicador (22) y para responder al movimiento de dicho indicador (22) dentro de la estructura de referencia espacial del robot (40) cuando los marcadores (2) están ocultos para determinar la nueva posición del indicador (22) y por tanto la nueva posición de la pieza de trabajo (1) y a continuación para controlar el robot (40) con el fin de continuar llevando a cabo los movimientos predeterminados con respecto a la pieza de trabajo (1).
Tipo: Resumen de patente/invención.
Solicitante: PROSURGICS LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: KNAVES BEECH BUSINESS CENTRE LOUDWATER,HIGH WYCOMBE BUCKINGHAMSHIRE H.
Inventor/es: FINLAY,PATRICK ARMSTRONG.
Fecha de Publicación: .
Fecha Concesión Europea: 17 de Diciembre de 2008.
Clasificación PCT:
- A61B19/00
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Patentes similares o relacionadas:
Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para la colocación de un objeto en un diente de un paciente, del 1 de Abril de 2020, de ALIGN TECHNOLOGY, INC.: Método implementado por ordenador de provisión de una representación digital de una plantilla ortodóntica para colocar un objeto en un diente de un […]
Combinación de un instrumento de terapia y formación de imagen, del 26 de Febrero de 2020, de ETHICON, INC.: Un instrumento combinado de terapia y formación de imágenes, comprendiendo el instrumento: una sonda de terapia para producir energía para alterar el tejido; […]
 Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Localizador de profundidad de punción vascular, del 26 de Junio de 2019, de Terumo Puerto Rico L.L.C: Conjunto de inserción vascular, que comprende:
una vaina de inserción ;
un dilatador ;
la vaina de inserción […]
Sistemas y métodos para la fabricación de una plantilla dental, del 28 de Mayo de 2019, de ALIGN TECHNOLOGY, INC.: Método para fabricación de una plantilla dental para posicionar un objeto en un diente de un paciente, que comprende: crear un modelo de diente […]
Endoscopio y dispositivo de tratamiento de accesorios integrado, del 4 de Marzo de 2019, de C.R. BARD, INC.: Endoscopio integrado que comprende un vástago que tiene extremos proximal y distal, y un dispositivo de aposición de tejido en el extremo distal […]
Microscopio quirúrgico y sensor de frente de onda integrados, del 7 de Marzo de 2018, de ALCON RESEARCH, LTD.: Un dispositivo para medir propiedades de un ojo , comprendiendo el dispositivo : un microscopio quirúrgico , un sensor de frente de […]
Fuente de alimentación para la identificación y control de herramientas quirúrgicas eléctricas, del 10 de Enero de 2018, de MICROLINE SURGICAL, INC: Un sistema para llevar a cabo cauterización térmica, que comprende: al menos un dispositivo de cauterización térmica, y una fuente de […]
Instalación para utilizar una plantilla con el fin de formar orificios para implantes en un maxilar, del 15 de Noviembre de 2017, de NOBEL BIOCARE SERVICES AG: Una instalación para formar orificios para implantes en un maxilar , comprendiendo la instalación una plantilla que se adapta a la forma […]