MANIPULADOR CINEMATICO PARALELO PARA ESPACIOS DE TRABAJO GRANDES.
Un robot industrial para el movimiento de un objeto en el espacio que comprende:
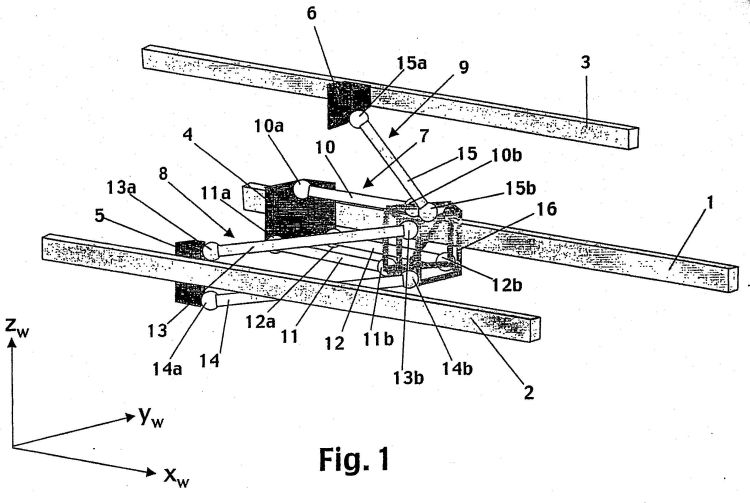
- una plataforma (16) dispuesta para portar el objeto, - un primer brazo (7) dispuesto para influenciar la plataforma en un primer movimiento y que comprende un primer actuador que tiene una primera vía (1) y un primer carro (4) desplazable linealmente a lo largo de la primera vía, y un primer (11) y un segundo (12) enlaces, comprendiendo cada enlace una junta externa (11b, 12b) conectada con la plataforma y una junta interna (1la, 12a) conectada con el primer carro, - un segundo brazo (8) dispuesto para influenciar la plataforma en un segundo movimiento, que comprende un segundo actuador que tiene una segunda vía (2) y un segundo carro (5) desplazable linealmente a lo largo de la segundo vía, y dos enlaces (13, 14) comprendiendo cada enlace una junta externa (13b, 14b) conectada con la plataforma y una junta interna (13a, 14a) conectada con el segundo carro, - un tercer brazo (9) dispuesto para influenciar la plataforma en un tercer movimiento, que comprende un tercer actuador y al menos un enlace (15) que comprende una junta externa (15b) conectada con la plataforma y una junta interna (15a) conectada con el tercer actuador, y - una unidad de control que controla los movimientos de la plataforma, caracterizado porque - el primer enlace (11) del primer brazo está dispuesto con su eje longitudinal no paralelo al eje longitudinal del segundo enlace (12) del primer brazo, - el primer brazo está dispuesto rotativo alrededor de al menos un eje perpendicular a un primer plano (C) que comprende la primera y segunda vías, - el segundo brazo está dispuesto rotativo alrededor de al menos un eje perpendicular a dicho primer plano, - el primer y el segundo brazos están dispuestos rotativos de tal manera que la plataforma es movible entre los lados opuestos de un segundo plano (D) perpendicular a dicho primer plano y que pasa a través del primer y del segundo carros y que los sigue continuamente, y - dicha unidad de control comprende unos medios de control adaptados para realizar, al recibir una orden, una reconfiguración de la plataforma y de los brazos del robot, donde la reconfiguración comprende desplazar la plataforma entre los lados opuestos de dicho segundo plano.
Tipo: Resumen de patente/invención.
Solicitante: ABB AB.
Nacionalidad solicitante: Suecia.
Dirección: KOPPARBERGSVAGEN 2,721 83 VASTERAS.
Inventor/es: BROG RDH, TORGNY.
Fecha de Publicación: .
Fecha Concesión Europea: 16 de Abril de 2008.
Clasificación PCT:
- B25J17/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 17/00 Uniones. › Uniones articuladas.
- B25J9/02 B25J […] › B25J 9/00 Manipuladores de control programado. › caracterizado por el movimiento de los brazos, p. ej. del tipo coordenadas cartesianas (B25J 9/06 tiene prioridad).
- B25J9/06 B25J 9/00 […] › caracterizados por brazos de articulaciones múltiples.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
Dispositivo rociador de material y un procedimiento para controlar la dirección de rociado del dispositivo, del 4 de Septiembre de 2019, de TIKKURILA OYJ: Herramienta de trabajo controlable de forma remota, en la que la herramienta de trabajo comprende: - un módulo de herramienta de trabajo fijo o modificable […]
 Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Sistema de manipulación de productos alimenticios, del 28 de Agosto de 2019, de FORMAX, INC: Sistema de transporte para llenar envases con productos alimenticios , que comprende:
a) un transportador principal que mueve los productos alimenticios […]
Mecanismo de conformidad pasiva, del 24 de Julio de 2019, de Delta Electronics, Inc: Un mecanismo (10, 10') de conformidad pasiva, que comprende: un miembro de fijación; una base instalada sobre el miembro de fijación, […]
 Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Sistema de motorización con par adaptado para articulación con medios de arrollamiento cruzados, del 26 de Junio de 2019, de THALES: Dispositivo de motorización que comprende:
• dos cilindros de arrollamiento (1a, 1b) sustancialmente paralelos, unos medios de […]
Articulación para un robot, del 13 de Mayo de 2019, de Universal Robots A/S: Una articulación para un robot que comprende un freno de seguridad que comprende un solenoide que con la activación del freno desplaza un trinquete acoplándolo […]
Robot humanoide que implementa una articulación esférica, del 8 de Mayo de 2019, de Bia: Robot humanoide, que comprende dos elementos conectados por una articulación esférica con tres grados de libertad en rotación, […]