BRAZO DE TELEMANIPULACION EN DOS PARTES.
Brazo de telemanipulación, que comprende un brazo maestro (5) manejado por un operador,
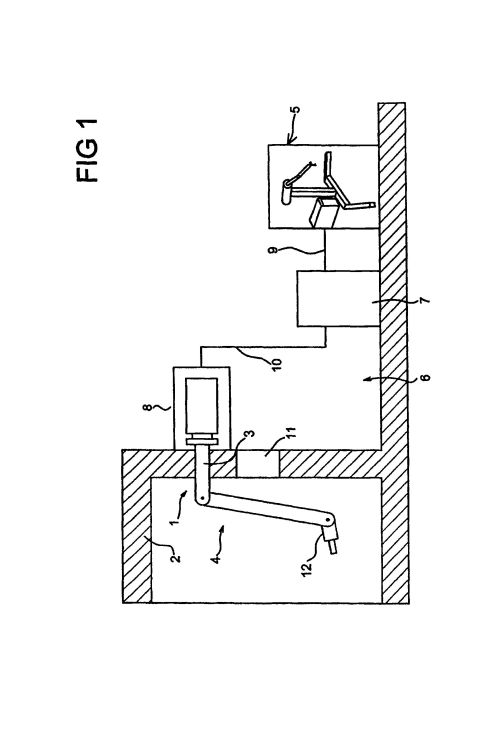
un brazo esclavo (1) que comprende un primer segmento (3), tubular, encastrado a través de una pared (2) y otros segmentos que terminan en un órgano de manipulación (12), componiendo dichos segmentos un tren articulado (4), estando el brazo maestro y el brazo esclavo desprovistos de transmisión mecánica directa que los una, pero provistos de un sistema de interfaz que comprende una parte de control (7) y una parte motriz (8), estando la parte motriz acoplada al segmento tubular (3) y comprendiendo motores (24, 25) de mando de transmisiones mecánicas (26, 27) incluidas en el brazo esclavo (1), y actuando la parte de control (7) los motores en respuesta a indicaciones de movimiento realizadas sobre el brazo maestro (5), comprendiendo la parte motriz (8) una envoltura estacionaria (13), caracterizado por un tambor (14) en montaje giratorio en la envoltura y fijado al segmento tubular (3), un motor estacionario (15) y una transmisión (16) que comprende una corona (22) alrededor del tambor (14) y un órgano (21) de engranaje de la corona y que conecta el tambor (14) al motor estacionario (15).
Tipo: Resumen de patente/invención.
Solicitante: COMMISSARIAT A L'ENERGIE ATOMIQUE
AREVA NC.
Nacionalidad solicitante: Francia.
Dirección: 25, RUE LEBLANC IMMEUBLE "LE PONANT D",75015 PARIS.
Inventor/es: GARREC, PHILIPPE, PIOLAIN,GERARD.
Fecha de Publicación: .
Fecha Concesión Europea: 7 de Mayo de 2008.
Clasificación PCT:
- B25J1/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 1/00 Manipuladores movidos en el espacio manualmente (del tipo control dominado B25J 3/00; micromanipuladores B25J 7/00). › móviles, montados sobre la pared.
- B25J3/04 B25J […] › B25J 3/00 Manipuladores del tipo control dominado, es decir, manipuladores en los que la unidad de control y la unidad controlada ejecutan movimientos correspondientes en el espacio. › dotados de servomecanismos (cabezas servocontroladas en sí B25J 15/02).
Patentes similares o relacionadas:
 MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS PARA ALTERNAR MODO DE CONTROL EN POSICIÓN Y MODO DE CONTROL EN VELOCIDAD, del 2 de Agosto de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende la adaptación del dispositivo […]
MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS PARA ALTERNAR MODO DE CONTROL EN POSICIÓN Y MODO DE CONTROL EN VELOCIDAD, del 2 de Agosto de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende la adaptación del dispositivo […]
 MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS, del 4 de Julio de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende […]
MÉTODO DE GUIADO DE DISPOSITIVOS ROBÓTICOS TELEOPERADOS, del 4 de Julio de 2013, de UNIVERSIDAD POLITECNICA DE MADRID: Método de guiado de dispositivos robóticos teleoperados para alternar modo de control en posición y modo de control en velocidad, que comprende […]
SISTEMA DE CONTROL ANTI-COLISION PARA UN MANIPULADOR CONTROLABLE DE FORMA MULTI-AXIAL., del 1 de Mayo de 1999, de PLOEM, SVEN: SE PRESENTA UN SISTEMA DE CONTROL LIBRE DE COLISIONES PARA UN MANIPULADOR MULTIAXIALMENTE CONTROLABLE , QUE COMPRENDE ESENCIALMENTE UNOS BRAZOS DE SOPORTE INTERCONECTADOS […]
 METODO DE TELEMANIPULACION POR TELEPRESENCIA, del 16 de Diciembre de 2007, de SRI INTERNATIONAL: EN UN SISTEMA DE TELEMANIPULACION PARA MANIPULAR OBJETOS EN UN LUGAR DE TRABAJO SITUADO UN ESPACIO REMOTO POR UN OPERADOR , COMO PUEDE SER UN SISTEMA QUIRURGICO […]
METODO DE TELEMANIPULACION POR TELEPRESENCIA, del 16 de Diciembre de 2007, de SRI INTERNATIONAL: EN UN SISTEMA DE TELEMANIPULACION PARA MANIPULAR OBJETOS EN UN LUGAR DE TRABAJO SITUADO UN ESPACIO REMOTO POR UN OPERADOR , COMO PUEDE SER UN SISTEMA QUIRURGICO […]
 MANIPULADOR PARA UNA CÁMARA DE ULTRA-ALTO VACÍO, del 10 de Abril de 2014, de AVS ADDED VALUE INDUSTRIAL ENGINEERING SOLUTIONS, S.L: Manipulador para una cámara de ultra-alto vacío que comprende una base próxima! (l a) anular fijamente anclable alrededor de una abertura de […]
MANIPULADOR PARA UNA CÁMARA DE ULTRA-ALTO VACÍO, del 10 de Abril de 2014, de AVS ADDED VALUE INDUSTRIAL ENGINEERING SOLUTIONS, S.L: Manipulador para una cámara de ultra-alto vacío que comprende una base próxima! (l a) anular fijamente anclable alrededor de una abertura de […]
MEJORAS INTRODUCIDAS EN ELEMENTOS MOTRICES PARA MANIPULADORES, del 1 de Octubre de 1988, de AURKI, S.COOP. LTDA.: MEJORAS INTRODUCIDAS EN ELEMENTOS MOTRICES PARA MANIPULADOS. LA INVENCION CONCIERNE A UNA SERIE DE MEJORAS EN LOS ELEMENTOS MOTRICES UTILIZADOS EN MANIPULADORES, DESTINADAS […]