Aparato de reconocimiento de vista trasera para vehículo.
Aparato de reconocimiento de vista trasera para una motocicleta (10),
que tiene un par de espejos retrovisores (11a, 11b) montados en los lados derecho e izquierdo de un manillar (12) de la motocicleta para reconocer una vista lateral trasera de la motocicleta,
un par de dispositivos de formación de imágenes (13a, 13b) dispuestos en los lados derecho e izquierdo de la motocicleta para capturar imágenes de las vistas traseras derecha e izquierda de la motocicleta; y
una pantalla de visualización (20) para presentar imágenes capturadas con los dispositivos de formación de imágenes (13a, 13b), donde una primera sección (21) de la pantalla de visualización (20) presenta una zona correspondiente a la zona (A) visible por el espejo retrovisor (11a, 11b), y una segunda sección (22) de la pantalla de visualización (20) presenta una zona (B) adyacente a la zona (A) dada por el espejo retrovisor (11a, 11b), donde cada uno de los dispositivos de formación de imágenes (13a, 13b) se prepara para capturar una imagen de la zona incluyendo una primera zona (A) reconocida con el espejo retrovisor (11a, 11b) y una segunda zona (B) situada en el lado de la primera zona (A) con relación a la motocicleta (10), donde la pantalla de visualización (20) presenta las zonas primera y segunda (A, B) de modo que el motorista reconozca la vista trasera de la motocicleta, donde la pantalla de visualización (20) presenta, en unión con las operaciones de uno de los indicadores de giro derecho e izquierdo, la imagen capturada con uno de los dispositivos de formación de imágenes derecho e izquierdo (13a, 13b) que está asociado con el indicador de giro en operación, y donde el tamaño de la imagen a visualizar en la primera zona (A) es aproximadamente igual al tamaño de un objeto (30a) reflejado en el espejo retrovisor (11a, 11b).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E05021955.
Solicitante: YAMAHA HATSUDOKI KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 2500 SHINGAI IWATA-SHI, SHIZUOKA-KEN JAPON.
Inventor/es: HANNYA,YOUSEI, ANDOU,YUSUKE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › Disposiciones para la visibilidad óptica (equipo antideslumbrante, p. ej. polarizador, para parabrisas o ventanas B60J 3/00).
- B62J99/00 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62J SILLINES O ASIENTOS PARA CICLOS; DISPOSITIVOS AUXILIARES O ACCESORIOS ESPECIALMENTE ADAPTADOS A LOS CICLOS NO PREVISTOS EN OTRO LUGAR, p. ej. PORTAMALETAS, GUARDABARROS. › Materia no prevista en otros grupos de esta subclase.
PDF original: ES-2453491_T3.pdf
Fragmento de la descripción:
Aparato de reconocimiento de vista trasera para vehículo Esta invención se refiere a un aparato de reconocimiento de vista trasera para un vehículo, en particular una motocicleta, y en particular a un aparato de reconocimiento de vista trasera capaz de asegurar un campo de visión ancho detrás del vehículo que los espejos retrovisores no pueden cubrir.
Tal aparato se conoce por JP 2003-339044 A1, que describe un aparato de reconocimiento de vista trasera para un vehículo, que tiene un par de espejos retrovisores para reconocer una vista lateral trasera del vehículo, un dispositivo de formación de imágenes dispuesto en el vehículo para capturar imágenes; y una pantalla de visualización para presentar imágenes capturadas con el dispositivo de formación de imágenes, donde una primera sección de la pantalla de visualización presenta una zona correspondiente a la zona visible por el espejo retrovisor, y una segunda sección de la pantalla de visualización presenta una zona adyacente a la zona dada por el espejo retrovisor.
Por lo general, el motorista mira los espejos retrovisores que reflejan un objeto, los cuales están montados en la carrocería de vehículo, para comprobar las vistas derecha, izquierda y trasera de la carrocería de vehículo. Dado que el par de espejos retrovisores están montados por lo general a la derecha e izquierda en un manillar respectivamente, la línea de visión del conductor se mueve solamente un poco entre los dos espejos, lo que apenas afecta adversamente a su conducción. Sin embargo, hay un campo de visión donde el motorista no puede ver con los espejos retrovisores, lo que se denomina ángulo muerto. Así, el motorista tiene que comprobar visualmente de forma directa lo que hay en el ángulo muerto.
La figura 12 ilustra una circunstancia hipotética donde una motocicleta 100 del conductor que circula en un primer carril (I) va a cambiar a un segundo carril (II) . En el segundo carril (II) , otros vehículos en circulación 120a, 120b, 120c están en diagonal detrás de la motocicleta 100 del conductor mientras que en el primer carril (I) otra motocicleta 130 está circulando justo detrás de la motocicleta 100 del conductor.
Como se representa en la figura 12, cuando el motorista comprueba el lado trasero usando el espejo retrovisor 110 montado en el manillar de su motocicleta 100, puede ver en el espejo retrovisor 110 una zona representada por un ángulo A, pero no puede ver una zona representada por el ángulo B llamado ángulo muerto.
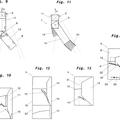
Las figuras 13 (a) a 13 (c) ilustran cómo los otros vehículos 120a, 120b, 120c aparecen en el espejo retrovisor 110 respectivamente en la circunstancia representada en la figura 12. Como se representa en la figura 13 (a) , si otro vehículo 120a parece pequeño en el espejo retrovisor 110, se podría pensar que la distancia relativa entre la motocicleta 100 del conductor y otro vehículo 120a es grande. A su vez, como se representa en la figura 13 (b) , si otro vehículo 120b parece grande en el espejo retrovisor 110, se podría pensar que la distancia relativa entre la motocicleta 100 del conductor y otro vehículo 120b es corta. En contraposición, como se representa en la figura 13 (c) , si no se refleja nada en el espejo retrovisor 110, el motorista no puede saber mirando únicamente al espejo retrovisor 110 si otro vehículo 120c está o no suficientemente cerca de modo que se encuentre en el ángulo muerto. En este caso, el motorista no puede reconocer la presencia de otro vehículo 120c hasta que compruebe visualmente de forma directa el ángulo muerto.
A la luz de lo anterior, JP-A-2001-151016 y JP-A-2001-105973 describen, en lugar del espejo retrovisor 110, métodos para representar una imagen de la vista trasera del vehículo en la pantalla de visualización proporcionando un dispositivo de formación de imágenes, tal como un CCD, en el vehículo para reconocer la vista trasera del vehículo.
JP-A-2001-151016 describe un método para representar una imagen de la vista trasera derecha o izquierda en la pantalla de visualización, usando los dispositivos de formación de imágenes dispuestos en espacios muertos derecho e izquierdo de la motocicleta donde se evita que los dispositivos de formación de imágenes contacten con algún obstáculo y el motorista no interfiera con la operación de los dispositivos de formación de imágenes. También se describe otro método para representar la imagen de la vista trasera del vehículo, en el que el dispositivo de formación de imágenes se coloca en la parte trasera del vehículo donde la carrocería de vehículo cubre por arriba la cara superior del dispositivo de formación de imágenes con el fin de evitar la incidencia de la luz solar y la entrada de agua de lluvia.
JP-A-2001-105973 describe un método para reconocer la vista trasera usando, en lugar del espejo retrovisor, un par de dispositivos de formación de imágenes colocados en la parte trasera del vehículo para mostrar constantemente las imágenes capturadas de las vistas traseras derecha e izquierda del vehículo en las pantallas de visualización derecha e izquierda dedicadas separadas. Este método también puede reducir la resistencia al aire debido a la ausencia de espejo retrovisor.
Los métodos para reconocer la vista trasera usando el dispositivo de formación de imágenes descrito en JP-A-2001151016 y JP-A-2001-105973, que cubre un ángulo grande, permiten al motorista comprobar visualmente una zona más ancha en el lado trasero del vehículo, en comparación con una zona visual cubierta por el espejo retrovisor. Esto es más útil en términos de la disponibilidad de más información por parte del motorista.
Sin embargo, dicho mayor volumen de información, que cubre un rango de zona más ancho en el lado trasero, no siempre es necesario o útil para el motorista mientras conduce. El motorista necesita la información sobre los campos de visión que representan claramente el lado trasero derecho y el lado trasero izquierdo. El motorista debe distinguir al instante la información relativa a la vista trasera derecha de la información relativa a la vista trasera izquierda, y en base a esta información, el motorista deberá determinar inmediatamente qué deberá hacer después.
El método descrito en JP-A-2001-151016 se refiere a la posición en el vehículo donde se deberán colocar los dispositivos de formación de imágenes para capturar las imágenes de las vistas traseras derecha e izquierda. Las imágenes capturadas se representan de forma típica en la pantalla de visualización colocada en el centro del vehículo delante del motorista. Así, independientemente si el motorista ve la imagen de la vista trasera derecha o izquierda, la dirección de su línea de visión hacia la pantalla de visualización no cambia. A diferencia de ver el espejo retrovisor, esto evita que el motorista distinga al instante la imagen de la vista trasera derecha de la de la vista trasera izquierda.
En el método descrito en JP-A-2001-105973, las imágenes de las vistas traseras derecha e izquierda capturadas con los dispositivos de formación de imágenes aparecen respectivamente en las pantallas de visualización derecha e izquierda dedicadas separadas. Así, la línea de visión del conductor dirigida a la pantalla de visualización se mueve de izquierda a derecha, y viceversa. En vista de lo anterior, este método hace más fácil que el motorista distinga la imagen de la vista trasera derecha de la de la vista trasera izquierda.
Sin embargo, si las pantallas de visualización derecha e izquierda separadas estuviesen a una corta distancia una de otra, al motorista le parecería que las imágenes de las vistas traseras derecha e izquierda aparecen en una única pantalla de visualización. Así, esto no ayuda al motorista a distinguir automáticamente estas imágenes. Por otra parte, con el fin de reconocer claramente, de la misma manera que usando el espejo retrovisor, la imagen de la vista trasera derecha o izquierda, los dispositivos de formación de imágenes derecho e izquierdo separados tienen que colocarse con una distancia más larga entremedio. Pero es más difícil hallar un espacio suficientemente grande para asegurar dicha distancia.
En contraposición, la información acerca del objeto reflejado en el espejo retrovisor ayuda al motorista casi subconscientemente a reconocer si la información es acerca de la vista trasera derecha o izquierda porque los espejos retrovisores separados están montados en los lados derecho e izquierdo del manillar. Además, el motorista puede ver los espejos retrovisores manteniendo su línea de visión a un nivel tan alto como el dirigido hacia delante durante la conducción normal sin mover de forma significativa su línea de visión de izquierda a derecha y viceversa.... [Seguir leyendo]
Reivindicaciones:
1. Aparato de reconocimiento de vista trasera para una motocicleta (10) , que tiene un par de espejos retrovisores (11a, 11b) montados en los lados derecho e izquierdo de un manillar (12) de la motocicleta para reconocer una vista lateral trasera de la motocicleta,
un par de dispositivos de formación de imágenes (13a, 13b) dispuestos en los lados derecho e izquierdo de la motocicleta para capturar imágenes de las vistas traseras derecha e izquierda de la motocicleta; y
una pantalla de visualización (20) para presentar imágenes capturadas con los dispositivos de formación de imágenes (13a, 13b) , donde una primera sección (21) de la pantalla de visualización (20) presenta una zona correspondiente a la zona (A) visible por el espejo retrovisor (11a, 11b) , y una segunda sección (22) de la pantalla de visualización (20) presenta una zona (B) adyacente a la zona (A) dada por el espejo retrovisor (11a, 11b) ,
donde cada uno de los dispositivos de formación de imágenes (13a, 13b) se prepara para capturar una imagen de la zona incluyendo una primera zona (A) reconocida con el espejo retrovisor (11a, 11b) y una segunda zona (B) situada en el lado de la primera zona (A) con relación a la motocicleta (10) , donde la pantalla de visualización (20) presenta las zonas primera y segunda (A, B) de modo que el motorista reconozca la vista trasera de la motocicleta,
donde la pantalla de visualización (20) presenta, en unión con las operaciones de uno de los indicadores de giro derecho e izquierdo, la imagen capturada con uno de los dispositivos de formación de imágenes derecho e izquierdo (13a, 13b) que está asociado con el indicador de giro en operación, y donde el tamaño de la imagen a visualizar en la primera zona (A) es aproximadamente igual al tamaño de un objeto (30a) reflejado en el espejo retrovisor (11a, 11b) .
2. Aparato de reconocimiento de vista trasera según la reivindicación 1, donde la pantalla de visualización (20) indica 25 una marca distintiva para distinguir la primera zona (A) de la segunda zona (B) .
3. Aparato de reconocimiento de vista trasera según la reivindicación 2, donde la marca distintiva se indica de tal manera que al menos una de las secciones rectangulares (21, 22) a indicar a lo largo de los bordes superior e inferior de la pantalla de visualización (20) se muestre en colores diferentes.
4. Aparato de reconocimiento de vista trasera según una de las reivindicaciones 1 a 3, donde la primera zona (A) incluye al menos una zona en la dirección inmediatamente hacia atrás de la motocicleta.
5. Aparato de reconocimiento de vista trasera según una de las reivindicaciones 1 a 4, donde la segunda zona (B) 35 corresponde a un ángulo muerto del espejo retrovisor o de los espejos retrovisores (11a, 11b) .
6. Aparato de reconocimiento de vista trasera según una de las reivindicaciones 1 a 5, donde la pantalla de visualización (20) presenta la imagen capturada con el dispositivo de formación de imágenes (13a, 13b) y girada horizontalmente.
7. Aparato de reconocimiento de vista trasera según una de las reivindicaciones 1 a 6, donde las imágenes respectivamente capturadas con los dispositivos de formación de imágenes derecho e izquierdo (13a, 13b) son presentadas en las secciones derecha e izquierda (21, 22) de la pantalla de visualización (20) .
8. Aparato de reconocimiento de vista trasera según una de las reivindicaciones 1 a 7, donde el par de dispositivos de formación de imágenes derecho e izquierdo (13a, 13b) están situados individualmente debajo de la parte más trasera de una barra de agarre (14) de la motocicleta (10) .
9. Motocicleta (10) provista del aparato de reconocimiento de vista trasera según una de las reivindicaciones 1 a 8. 50
Patentes similares o relacionadas:
Panel de ventana con dispositivo de sujeción para unir piezas de accesorio y método de ensamblaje, del 15 de Julio de 2020, de SAINT-GOBAIN GLASS FRANCE: Una unidad de acristalamiento de vehículo que tiene un elemento acristalado y al menos una base para la fijación reversible de un accesorio a dicho […]
 Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de cámara y sistema de reemplazo de espejo, del 15 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de cámara para un vehículo, en particular a un vehículo comercial, comprendiendo: al menos una unidad de captación de imágenes […]
Sistema de asistencia a la conducción para un vehículo, vehículo ferroviario y procedimiento de uso asociados, del 18 de Diciembre de 2019, de ALSTOM Transport Technologies: Sistema de asistencia a la conducción para un vehículo que consta de una cabina acotada por una ventana y al menos un elemento […]
Estructura de visualización, del 4 de Diciembre de 2019, de Inbecam Oy: Una estructura de visualización para un sistema de visualización de punto ciego de un vehículo, estando dispuesta la estructura de visualización (DS) para instalarse en conexión […]
Aparato de control y procedimiento para un sistema de asistencia al conductor de un vehículo, del 13 de Noviembre de 2019, de CONTI TEMIC MICROELECTRONIC GMBH: Aparato de control (ECU) para un sistema de asistencia al conductor de un vehículo, que comprende un procesador de señales (DSP), que sirve para procesar datos […]
 Sistema de visión, del 18 de Septiembre de 2019, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo para la representación de una zona de grabación (A, B, C) situada por fuera del vehículo que comprende una […]
Sistema de visión, del 18 de Septiembre de 2019, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo para la representación de una zona de grabación (A, B, C) situada por fuera del vehículo que comprende una […]
Dispositivo de accionamiento para un elemento que se va a accionar, del 11 de Septiembre de 2019, de GEBR. BODE GMBH & CO. KG: Dispositivo de accionamiento para accionar un elemento, que presenta - un accionamiento de correa dentada con una correa dentada , - por lo menos un disco dentado […]