Sistema de visión.
Sistema de visión (13) para un vehículo (10) para la representación de una zona de grabación (A,
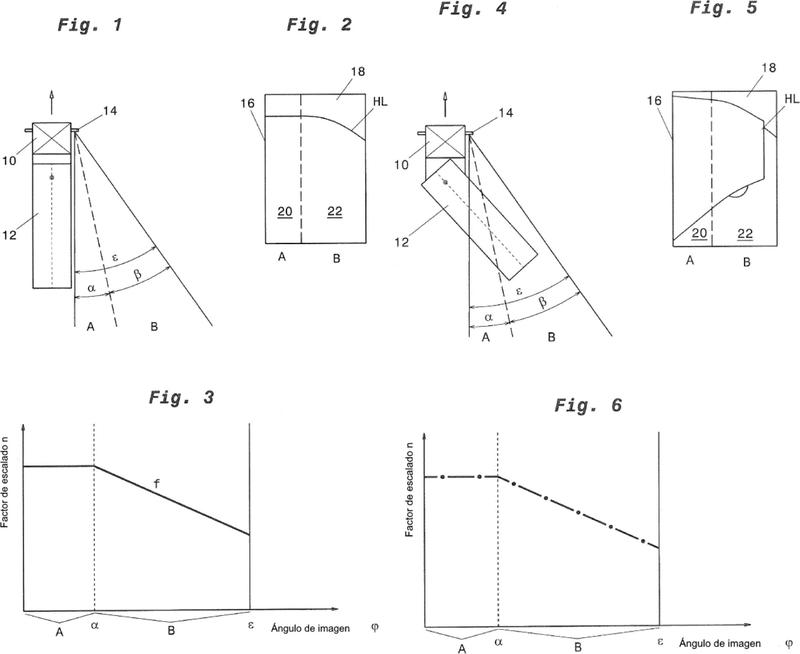
B, C) situada por fuera del vehículo (10) que comprende una unidad de grabación (14) instalada en el vehículo (10) con al menos un aparato de grabación para detectar una imagen de la zona de grabación (A, B, C), comprendiendo la zona de grabación al menos dos zonas de grabación parciales (A, B, C, D), extendiéndose hacia fuera la zona de grabación (A, B, C) desde un lado del vehículo y conteniendo las dos zonas de grabación parciales (A, B, C, D),
una unidad de reproducción (15) para el espacio interior del vehículo con una zona de reproducción (16) con dimensiones predeterminadas, y una unidad de cálculo (17) que procesa la imagen detectada por la unidad de grabación (14) y la envía a la unidad de reproducción (15) para la visualización, en el que la unidad de cálculo (17) está adaptada para escalar la imagen de la zona de grabación (A, B, C) detectada por la unidad de grabación (14) al menos en una dirección de ángulo de imagen con un factor de escalado (n),
en el que la unidad de reproducción (15) está adaptada para visualizar la imagen escalada (20, 22, 24, 26) en la zona de reproducción (16), comprendiendo la imagen escalada al menos dos imágenes parciales (20, 22, 24, 26) que están en correspondencia en cada caso con las al menos dos zonas de grabación parciales (A, B, C, D) determinándose el factor de escalado (n) mediante la unidad de cálculo dependiendo de un ángulo de imagen (φ) de la imagen detectada de la zona de grabación (A, B, C) correspondientemente a una función de representación (f(φ)), y estando adaptada la función de representación (f(φ)) correspondientemente a una respectiva situación de marcha y presentando al menos dos zonas distintas en la dirección del ángulo de imagen, que corresponden a las al menos dos zonas de grabación parciales, y la curva de función de función de representación (f(φ)) es discontinua en la zona de transición entre las zonas de grabación parciales.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E15193053.
Solicitante: MEKRA LANG GMBH & CO. KG.
Nacionalidad solicitante: Alemania.
Dirección: Buchheimer Strasse 4 91465 Ergersheim ALEMANIA.
Inventor/es: LANG, WERNER, BAUER, STEFAN, GEISSENDÖRFER,PETER, SNEL,JAAP-JAN, REDLINGSHÖFER,ANDREAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › Disposiciones para la visibilidad óptica (equipo antideslumbrante, p. ej. polarizador, para parabrisas o ventanas B60J 3/00).
- B60R1/06 B60R […] › B60R 1/00 Disposiciones para la visibilidad óptica (equipo antideslumbrante, p. ej. polarizador, para parabrisas o ventanas B60J 3/00). › montados en el exterior del vehículo (B60R 1/08 tiene prioridad).
- H04N5/232 ELECTRICIDAD. › H04 TECNICA DE LAS COMUNICACIONES ELECTRICAS. › H04N TRANSMISION DE IMAGENES, p. ej. TELEVISION. › H04N 5/00 Detalles de los sistemas de televisión (Detalles de los dispositivos de análisis o sus combinaciones con la producción de la tensión de alimentación H04N 3/00). › Dispositivos para el control de las cámaras de televisión, p. ej. control a distancia (H04N 5/235 tiene prioridad).
- H04N7/18 H04N […] › H04N 7/00 Sistemas de televisión (detalles H04N 3/00, H04N 5/00; métodos y arreglos, para la codificación, decodificación, compresión o descompresión de señales de vídeo digital H04N 19/00; distribución selectiva de contenido H04N 21/00). › Sistemas de televisión en circuito cerrado, es decir, sistemas en los cuales la señal no es difundida.
PDF original: ES-2754079_T3.pdf
Reivindicaciones:
1. Sistema de visión (13) para un vehículo (10) para la representación de una zona de grabación (A, B, C) situada por fuera del vehículo (10) que comprende una unidad de grabación (14) instalada en el vehículo (10) con al menos un aparato de grabación para detectar una imagen de la zona de grabación (A, B, C) , comprendiendo la zona de grabación al menos dos zonas de grabación parciales (A, B, C, D) , extendiéndose hacia fuera la zona de grabación (A, B, C) desde un lado del vehículo y conteniendo las dos zonas de grabación parciales (A, B, C, D) ,
una unidad de reproducción (15) para el espacio interior del vehículo con una zona de reproducción (16) con dimensiones predeterminadas, y una unidad de cálculo (17) que procesa la imagen detectada por la unidad de grabación (14) y la envía a la unidad de reproducción (15) para la visualización, en el que la unidad de cálculo (17) está adaptada para escalar la imagen de la zona de grabación (A, B, C) detectada por la unidad de grabación (14) al menos en una dirección de ángulo de imagen con un factor de escalado (n) ,
en el que la unidad de reproducción (15) está adaptada para visualizar la imagen escalada (20, 22, 24, 26) en la zona de reproducción (16) , comprendiendo la imagen escalada al menos dos imágenes parciales (20, 22, 24, 26) que están en correspondencia en cada caso con las al menos dos zonas de grabación parciales (A, B, C, D) determinándose el factor de escalado (n) mediante la unidad de cálculo dependiendo de un ángulo de imagen (9) de la imagen detectada de la zona de grabación (A, B, C) correspondientemente a una función de representación (f (9) ) , y estando adaptada la función de representación (f (9) ) correspondientemente a una respectiva situación de marcha y presentando al menos dos zonas distintas en la dirección del ángulo de imagen, que corresponden a las al menos dos zonas de grabación parciales, y la curva de función de función de representación (f (9) ) es discontinua en la zona de transición entre las zonas de grabación parciales.
2. Sistema de visión (13) según la reivindicación 1, en el que la función de representación (f (9) ) no es constante al menos por secciones.
3. Sistema de visión (13) según una de las reivindicaciones 1 o 2, en el que la función de representación (f (9) ) presenta al menos una zona en la que el factor de escalado (n) discurre linealmente en dependencia del ángulo de imagen (9) .
4. Sistema de visión (13) según una de las reivindicaciones 1 a 3, en el que la función de representación (f (9) ) es constante al menos por zonas.
5. Sistema de visión (13) según una de las reivindicaciones 1 a 4, en el que la función de representación (f (9) ) presenta al menos una zona en la que el factor de escalado (n) no discurre linealmente en dependencia del ángulo de imagen (9) .
6. Sistema de visión (13) según una de las reivindicaciones 1 a 5, en el que la función de representación (f (9) ) presenta al menos una zona en la que el factor de escalado (n) discurre continuamente en dependencia del ángulo de imagen (9) .
7. Sistema de visión (13) según una de las reivindicaciones 1 a 6, en el que el ángulo de imagen (9) representado es variable en dependencia de la situación de marcha.
8. Sistema de visión (13) según una de las reivindicaciones 1 a 7, en el que el ángulo de imagen (9) es un ángulo de imagen horizontal (a, b, c, d) o en el que el ángulo de imagen (9) es un ángulo de imagen vertical.
9. Sistema de visión (13) según una de las reivindicaciones 1 a 8, en el que la unidad de grabación (14) está instalada en el vehículo (10) de tal modo que la imagen detectada de la zona de grabación contiene tanto una zona directamente por detrás del vehículo como una zona que corresponde a la vista del horizonte.
10. Sistema de visión (13) según una de las reivindicaciones 1 a 7, en el que el vehículo es un vehículo con remolque, una de las imágenes parciales (20) está no comprimida y una de las imágenes parciales (22, 24, 26) está comprimida, y en el que la función de representación (f (9) ) está adaptada en correspondencia con una situación de marcha de tal modo que en la situación de marcha de una operación de giro o una marcha en curva del vehículo con remolque, la zona de imagen, en la que se puede observar un canto trasero (HK) de un remolque, está situada en la imagen parcial (20) que está no comprimida.
11. Sistema de visión (13) según la reivindicación 10, en el que el canto trasero (HK) del remolque está situado siempre durante la situación de marcha de una operación de giro o una marcha en curva del vehículo con remolque en la imagen parcial (20) no comprimida.
12. Sistema de visión (13) según la reivindicación 10 u 11, en el que el tamaño de la zona de grabación parcial, que corresponde a la imagen parcial no comprimida, se adapta dinámicamente durante la situación de marcha de una operación de giro o una marcha en curva del vehículo con remolque en dependencia de la posición del canto trasero (HK) respecto al vehículo,
o en el que es constante el tamaño de la zona de grabación parcial, que corresponde a la imagen parcial no comprimida, y la función de representación se adapta dinámicamente durante la situación de marcha de una operación de giro o una marcha en curva del vehículo con remolque en dependencia de la posición del canto trasero (HK) respecto al vehículo de tal modo que la imagen parcial no comprimida, representada en la zona de reproducción (16) , se desplaza en correspondencia con la posición del canto trasero,
o en el que la zona de grabación se pivota dinámicamente durante la situación de marcha de una operación de giro o una marcha en curva del vehículo con remolque en dependencia de la posición del canto trasero (HK) respecto al vehículo.
13. Sistema de visión (13) de acuerdo con una de las reivindicaciones 10 a 12, en el que se mantiene constante una distancia (W) entre el canto trasero (HK) y un borde exterior de la zona de grabación parcial, que corresponde a la imagen parcial no comprimida, durante la situación de marcha de una operación de giro o una marcha en curva del vehículo con remolque en dependencia de la posición del canto trasero (HK) respecto al vehículo.
14. Sistema de visión (13) de acuerdo con una de las reivindicaciones 10 a 13, en el que la posición del canto trasero (HK) se determina mediante un sensor de posición o mediante datos del vehículo, que contienen la longitud del vehículo, la longitud del remolque y un ángulo de dirección, o mediante la unidad de cálculo (17) a partir de la imagen detectada de la zona de grabación.
Patentes similares o relacionadas:
Panel de ventana con dispositivo de sujeción para unir piezas de accesorio y método de ensamblaje, del 15 de Julio de 2020, de SAINT-GOBAIN GLASS FRANCE: Una unidad de acristalamiento de vehículo que tiene un elemento acristalado y al menos una base para la fijación reversible de un accesorio a dicho […]
 Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de cámara y sistema de reemplazo de espejo, del 15 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de cámara para un vehículo, en particular a un vehículo comercial, comprendiendo: al menos una unidad de captación de imágenes […]
Sistema de asistencia a la conducción para un vehículo, vehículo ferroviario y procedimiento de uso asociados, del 18 de Diciembre de 2019, de ALSTOM Transport Technologies: Sistema de asistencia a la conducción para un vehículo que consta de una cabina acotada por una ventana y al menos un elemento […]
Estructura de visualización, del 4 de Diciembre de 2019, de Inbecam Oy: Una estructura de visualización para un sistema de visualización de punto ciego de un vehículo, estando dispuesta la estructura de visualización (DS) para instalarse en conexión […]
Aparato de control y procedimiento para un sistema de asistencia al conductor de un vehículo, del 13 de Noviembre de 2019, de CONTI TEMIC MICROELECTRONIC GMBH: Aparato de control (ECU) para un sistema de asistencia al conductor de un vehículo, que comprende un procesador de señales (DSP), que sirve para procesar datos […]
Dispositivo de accionamiento para un elemento que se va a accionar, del 11 de Septiembre de 2019, de GEBR. BODE GMBH & CO. KG: Dispositivo de accionamiento para accionar un elemento, que presenta - un accionamiento de correa dentada con una correa dentada , - por lo menos un disco dentado […]
EQUIPO DE AUSCULTACIÓN AUTOMÁTICA DE SEÑALES DE TRÁFICO Y PANELES, del 1 de Febrero de 2012, de EUROCONSULT NUEVAS TECNOLOGIAS, S.A. UNIVERSIDAD DE ALCALA SAFECONTROL S.A: El equipo objeto de invención tiene la finalidad de realizar la auscultación automática de señales y paneles de tráfico, realizando para ello la […]