BOMBEO PERISTALTICO OPTICO CON TRAMPAS OPTICAS.
Un procedimiento de transferencia de una partícula entre colectores de trampas ópticas,
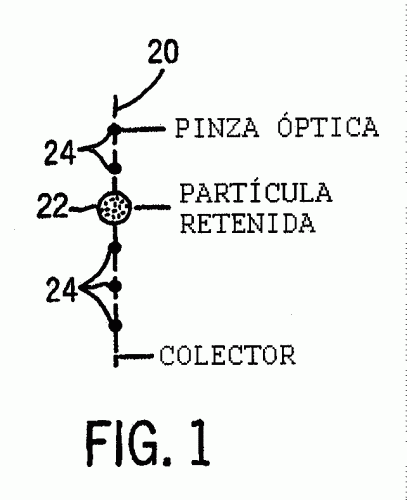
que comprende las etapas de: proporcionar un haz de luz láser (100), dividir el haz de luz láser en una pluralidad de haces de luz láser adicionales (104), enfocar los haces de luz láser adicionales para establecer una condición de gradiente óptico para cada uno de los haces de láser que, posteriormente, puede retener una partícula (22, 60, 62, 84, 86), proporcionar una pluralidad de patrones (26, 28, 30), incluyendo cada patrón al menos un colector (20, 50, 52, 54, 56) y comprendiendo cada uno de dichos colectores al menos uno de los haces de láser con la condición de gradiente óptico formada a partir de los haces de luz láser con la pluralidad de patrones dispuestos de tal manera que al menos un colector, que comprende cada patrón, está separado por un colector de cada uno de los otros patrones e iluminar y apagar secuencialmente cada uno de la pluralidad de patrones usando los haces de luz láser a intervalos lo suficientemente cercanos, tras apagar el patrón previamente dicho, como para capturar y transferir la partículas desde el al menos un colector hasta un colector adyacente, en el que la captura y la transferencia de la partícula hace que la partícula se desplace desde el al menos un colector de uno de los patrones hasta el colector adyacente del mismo patrón.
Tipo: Resumen de patente/invención.
Solicitante: THE UNIVERSITY OF CHICAGO.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 5640 SOUTH ELLIS AVENUE, SUITE 405,CHICAGO, IL 60637.
Inventor/es: GRIER, DAVID, G., BEHRENS, SVEN, HOLGER.
Fecha de Publicación: .
Fecha Solicitud PCT: 6 de Junio de 2002.
Clasificación Internacional de Patentes:
- B25J7/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Micromanipuladores.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Oficina Europea de Patentes, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania, Armenia, Azerbayán, Bielorusia, Ghana, Gambia, Kenya, Kirguistán, Kazajstán, Lesotho, República del Moldova, Malawi, Mozambique, Federación de Rusia, Sudán, Sierra Leona, Tayikistán, Turkmenistán, República Unida de Tanzania, Uganda, Zimbabwe, Burkina Faso, Benin, República Centroafricana, Congo, Costa de Marfil, Camerún, Gabón, Guinea, Malí, Mauritania, Niger, Senegal, Chad, Togo, Zambia, Organización Regional Africana de la Propiedad Industrial, Swazilandia, Guinea-Bissau, Guinea Ecuatorial, Organización Africana de la Propiedad Intelectual, Organización Eurasiática de Patentes.
Patentes similares o relacionadas:
Dispositivo manipulador acoplable a un brazo robot, del 20 de Mayo de 2019, de COMERCIAL INDUSTRIAL MAQUINARIA CARTON ONDULADO S.L: 1. Dispositivo manipulador acoplable a un brazo robot, estando previsto para la manipulación de pilas formadas a partir de una pluralidad […]
DISPOSITIVO AUTOMÁTICO DE POSICIONAMIENTO PARA CORTE DE TEJIDO TRIDIMENSIONAL EN UNA MUESTRA, VIBRÁTOMO QUE LO COMPRENDE Y SU USO, del 18 de Agosto de 2016, de UNIVERSITAT POLITECNICA DE VALENCIA: Dispositivo automático de posicionamiento para corte de tejido tridimensional en una muestra, vibrátomo que lo comprende y su uso La presente invención […]
 Útil para pinza micro-técnica, del 16 de Marzo de 2016, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE (CNRS): .Útil para pinza micro-técnica que comprende una contera que comprende:
- un soporte y
- un primer dedo y un segundo dedo ,
poseyendo […]
Útil para pinza micro-técnica, del 16 de Marzo de 2016, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE (CNRS): .Útil para pinza micro-técnica que comprende una contera que comprende:
- un soporte y
- un primer dedo y un segundo dedo ,
poseyendo […]
 Dispositivo automático de posicionamiento para corte de tejido tridimensional en una muestra, vibrátomo que lo comprende y su uso, del 19 de Junio de 2015, de UNIVERSITAT POLITECNICA DE VALENCIA: Dispositivo automático de posicionamiento para corte de tejido tridimensional en una muestra, vibrátomo que lo comprende y su uso.
La presente invención se refiere a […]
Dispositivo automático de posicionamiento para corte de tejido tridimensional en una muestra, vibrátomo que lo comprende y su uso, del 19 de Junio de 2015, de UNIVERSITAT POLITECNICA DE VALENCIA: Dispositivo automático de posicionamiento para corte de tejido tridimensional en una muestra, vibrátomo que lo comprende y su uso.
La presente invención se refiere a […]
 DISPOSITIVO PORTABLE AUTÓNOMO, EN ESPECIAL APLICABLE EN CIRUGÍA, MANIPULACIÓN DE MICRO-COMPONENTES Y SIMILARES, del 13 de Julio de 2012, de HERNANDEZ JUANPERA, Jesus: Dispositivo portable autónomo , en especial aplicable en cirugía, manipulación de micro-componentes y similares, comprendiendo una micro-herramienta de trabajo acoplable […]
DISPOSITIVO PORTABLE AUTÓNOMO, EN ESPECIAL APLICABLE EN CIRUGÍA, MANIPULACIÓN DE MICRO-COMPONENTES Y SIMILARES, del 13 de Julio de 2012, de HERNANDEZ JUANPERA, Jesus: Dispositivo portable autónomo , en especial aplicable en cirugía, manipulación de micro-componentes y similares, comprendiendo una micro-herramienta de trabajo acoplable […]
 DISPOSITIVO PORTABLE AUTÓNOMO, EN ESPECIAL, APLICABLE A CIRUGÍA, MANIPULACIÓN DE MICRO-COMPONENTES Y SIMILARES, del 21 de Junio de 2012, de HERNANDEZ JUANPERA, Jesus: Dispositivo portable autónomo , en especial aplicable en cirugía, manipulación de micro-componentes y similares, comprendiendo una micro-herramienta […]
DISPOSITIVO PORTABLE AUTÓNOMO, EN ESPECIAL, APLICABLE A CIRUGÍA, MANIPULACIÓN DE MICRO-COMPONENTES Y SIMILARES, del 21 de Junio de 2012, de HERNANDEZ JUANPERA, Jesus: Dispositivo portable autónomo , en especial aplicable en cirugía, manipulación de micro-componentes y similares, comprendiendo una micro-herramienta […]
DISPOSITIVO PARA AJUSTAR UN COMPONENTE PARA LA TRANSMISION DE SEÑALES OPTICAS, del 16 de Octubre de 1999, de SIEMENS AKTIENGESELLSCHAFT: UN COMPONENTE OPTICO ESTA DISPUESTO EN UN MANGUITO UNIDO POR JUNTA UNIVERSAL PARA PIVOTAR EN UNA CARCASA . UNOS RESORTES CURVADOS DESCANSAN SOBRE EL MANGUITO […]
 APARATO PARA RETIRAR UN CABELLO/FIBRA INDIVIDUAL CADA VEZ DE UN MECHON UTILIZANDO UN DISPOSITIVO DE AGARRE, del 28 de Octubre de 2009, de THE PROCTER AND GAMBLE COMPANY: Un aparato para retirar un cabello/fibra individual cada vez de un mechón utilizando un dispositivo de agarre , que tiene un primer y un […]
APARATO PARA RETIRAR UN CABELLO/FIBRA INDIVIDUAL CADA VEZ DE UN MECHON UTILIZANDO UN DISPOSITIVO DE AGARRE, del 28 de Octubre de 2009, de THE PROCTER AND GAMBLE COMPANY: Un aparato para retirar un cabello/fibra individual cada vez de un mechón utilizando un dispositivo de agarre , que tiene un primer y un […]