Dispositivo manipulador acoplable a un brazo robot.
1. Dispositivo manipulador (1) acoplable a un brazo robot, estando previsto para la manipulación de pilas formadas a partir de una pluralidad de elementos laminares superpuestos entre sí,
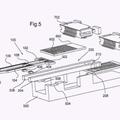
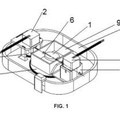
que comprende una estructura de horquilla formada por un brazo superior (2) y un brazo inferior (3) dispuestos paralelos entre sí, siendo el brazo superior (2) o inferior (3) desplazable en sentido ascendente/descendente con respecto al brazo enfrentado a éste, siendo el brazo desplazable por unos medios de guiado presentes en una base de soporte (4), en el que se incluye un medio empujador (6) desplazable en una dirección paralela a un eje longitudinal de cualquiera de los brazos superior (2) o inferior (3) y a lo largo de la longitud del brazo inferior (3), y en el que la base de soporte (4) comprende un punto de articulación acoplable a un brazo robot, capaz de mover y orientar el dispositivo manipulador a conveniencia, caracterizado por el hecho de que incluye un medio de tope (5) previsto para contactar con la parte posterior de los elementos laminares y un elemento separador escamoteable (7) en forma de cuña con una superficie horizontal prevista para contactar con una cara inferior de un elemento laminar, estando el medio empujador (6), el medio de tope y el elemento separador escamoteable (7) vinculados entre sí de forma solidaria a un único mecanismo accionador, y en el que el elemento empujador (6) es desplazable con respecto al elemento separador mediante unos medios de accionamiento secundarios actuables de forma independiente con respecto al medio accionador.
2. Dispositivo manipulador (1) según la reivindicación 1, caracterizado por el hecho de que el mecanismo accionador comprende al menos una transmisión (8) de cinta sinfín-poleas, estando el elemento separador escamoteable (7) montado de forma solidaria en la cinta sinfín.
3. Dispositivo manipulador (1) según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que los medios de accionamiento secundarios comprenden un cilindro-pistón pneumático o hidráulico.
4. Dispositivo manipulador (1) según la reivindicación 1, caracterizado por el hecho de que el brazo superior (2) comprende una pluralidad de púas (20) separadas entre sí que sobresalen en un plano perpendicular con respecto a unos medios de guiado presentes en la base de soporte (4).
5. Dispositivo manipulador (1) según la reivindicación 1, caracterizado por el hecho de que el brazo inferior (3) comprende una pluralidad de púas (30) que sobresalen en un plano perpendicular con respecto a la base de soporte (4).
6. Dispositivo manipulador (1) según cualquiera de las reivindicaciones 1, 4 y 5, caracterizado por el hecho de que el medio de tope está formado por una pluralidad de pletinas fijadas de forma solidaria al elemento separador escamoteable (7), estando las pletinas dispuestas de tal manera que son desplazables a través del espacio existente entre las púas del brazo superior y/o brazo inferior.
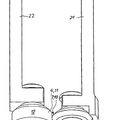
7. Dispositivo manipulador (1) según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que una cara inferior del brazo superior (2) incluye un rebaje escalonado (22).
8. Dispositivo manipulador (1) según la reivindicación 7, caracterizado por el hecho de que el rebaje incluye una región con un plano transversal inclinado con respecto a un eje axial del dispositivo manipulador.
9. Dispositivo manipulador (1) según las reivindicaciones 1 y 8, caracterizado por el hecho de que el ángulo de inclinación definido por una cara superior del elemento separador escamoteable y el ángulo definido por la región con el plano transversal inclinado con respecto al resto de la cara inferior del brazo superior tienen sensiblemente el mismo ángulo.
10. Dispositivo manipulador (1) según cualquiera de las reivindicaciones anteriores, caracterizado por el hecho de que el medio empujador (6) es movible en altura mediante unos segundos medios de guiado.
11. Dispositivo manipulador (1) según la reivindicación 10, caracterizado por el hecho de que los segundos medios de guiado comprenden al menos una columna guía (61) dispuesta en un plano perpendicular al movimiento hacia delante y hacia atrás del medio empujador (6), que es deslizable a través de un orificio pasante.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201930573.
Solicitante: COMERCIAL INDUSTRIAL MAQUINARIA CARTON ONDULADO S.L.
Nacionalidad solicitante: España.
Inventor/es: SERRA OBIOL,RAMON, PUIG VARGAS,Jordi.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J7/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Micromanipuladores.
PDF original: ES-1229709_U.pdf
Patentes similares o relacionadas:
DISPOSITIVO AUTOMÁTICO DE POSICIONAMIENTO PARA CORTE DE TEJIDO TRIDIMENSIONAL EN UNA MUESTRA, VIBRÁTOMO QUE LO COMPRENDE Y SU USO, del 18 de Agosto de 2016, de UNIVERSITAT POLITECNICA DE VALENCIA: Dispositivo automático de posicionamiento para corte de tejido tridimensional en una muestra, vibrátomo que lo comprende y su uso La presente invención […]
 Útil para pinza micro-técnica, del 16 de Marzo de 2016, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE (CNRS): .Útil para pinza micro-técnica que comprende una contera que comprende:
- un soporte y
- un primer dedo y un segundo dedo ,
poseyendo […]
Útil para pinza micro-técnica, del 16 de Marzo de 2016, de CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE (CNRS): .Útil para pinza micro-técnica que comprende una contera que comprende:
- un soporte y
- un primer dedo y un segundo dedo ,
poseyendo […]
 Dispositivo automático de posicionamiento para corte de tejido tridimensional en una muestra, vibrátomo que lo comprende y su uso, del 19 de Junio de 2015, de UNIVERSITAT POLITECNICA DE VALENCIA: Dispositivo automático de posicionamiento para corte de tejido tridimensional en una muestra, vibrátomo que lo comprende y su uso.
La presente invención se refiere a […]
Dispositivo automático de posicionamiento para corte de tejido tridimensional en una muestra, vibrátomo que lo comprende y su uso, del 19 de Junio de 2015, de UNIVERSITAT POLITECNICA DE VALENCIA: Dispositivo automático de posicionamiento para corte de tejido tridimensional en una muestra, vibrátomo que lo comprende y su uso.
La presente invención se refiere a […]
 DISPOSITIVO PORTABLE AUTÓNOMO, EN ESPECIAL APLICABLE EN CIRUGÍA, MANIPULACIÓN DE MICRO-COMPONENTES Y SIMILARES, del 13 de Julio de 2012, de HERNANDEZ JUANPERA, Jesus: Dispositivo portable autónomo , en especial aplicable en cirugía, manipulación de micro-componentes y similares, comprendiendo una micro-herramienta de trabajo acoplable […]
DISPOSITIVO PORTABLE AUTÓNOMO, EN ESPECIAL APLICABLE EN CIRUGÍA, MANIPULACIÓN DE MICRO-COMPONENTES Y SIMILARES, del 13 de Julio de 2012, de HERNANDEZ JUANPERA, Jesus: Dispositivo portable autónomo , en especial aplicable en cirugía, manipulación de micro-componentes y similares, comprendiendo una micro-herramienta de trabajo acoplable […]
 DISPOSITIVO PORTABLE AUTÓNOMO, EN ESPECIAL, APLICABLE A CIRUGÍA, MANIPULACIÓN DE MICRO-COMPONENTES Y SIMILARES, del 21 de Junio de 2012, de HERNANDEZ JUANPERA, Jesus: Dispositivo portable autónomo , en especial aplicable en cirugía, manipulación de micro-componentes y similares, comprendiendo una micro-herramienta […]
DISPOSITIVO PORTABLE AUTÓNOMO, EN ESPECIAL, APLICABLE A CIRUGÍA, MANIPULACIÓN DE MICRO-COMPONENTES Y SIMILARES, del 21 de Junio de 2012, de HERNANDEZ JUANPERA, Jesus: Dispositivo portable autónomo , en especial aplicable en cirugía, manipulación de micro-componentes y similares, comprendiendo una micro-herramienta […]
BOMBEO PERISTALTICO OPTICO CON TRAMPAS OPTICAS., del 16 de Abril de 2006, de THE UNIVERSITY OF CHICAGO: Un procedimiento de transferencia de una partícula entre colectores de trampas ópticas, que comprende las etapas de: proporcionar un haz de luz láser […]
DISPOSITIVO PARA AJUSTAR UN COMPONENTE PARA LA TRANSMISION DE SEÑALES OPTICAS, del 16 de Octubre de 1999, de SIEMENS AKTIENGESELLSCHAFT: UN COMPONENTE OPTICO ESTA DISPUESTO EN UN MANGUITO UNIDO POR JUNTA UNIVERSAL PARA PIVOTAR EN UNA CARCASA . UNOS RESORTES CURVADOS DESCANSAN SOBRE EL MANGUITO […]
 APARATO PARA RETIRAR UN CABELLO/FIBRA INDIVIDUAL CADA VEZ DE UN MECHON UTILIZANDO UN DISPOSITIVO DE AGARRE, del 28 de Octubre de 2009, de THE PROCTER AND GAMBLE COMPANY: Un aparato para retirar un cabello/fibra individual cada vez de un mechón utilizando un dispositivo de agarre , que tiene un primer y un […]
APARATO PARA RETIRAR UN CABELLO/FIBRA INDIVIDUAL CADA VEZ DE UN MECHON UTILIZANDO UN DISPOSITIVO DE AGARRE, del 28 de Octubre de 2009, de THE PROCTER AND GAMBLE COMPANY: Un aparato para retirar un cabello/fibra individual cada vez de un mechón utilizando un dispositivo de agarre , que tiene un primer y un […]