CIP-2021 : G01B 11/25 : mediante la proyección de un patrón, p. ej.franjas de Moiré,
sobre el objeto (G01B 11/255 tiene prioridad).
CIP-2021 › G › G01 › G01B › G01B 11/00 › G01B 11/25[2] › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS.
G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
G01B 11/25 · · mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
CIP2021: Invenciones publicadas en esta sección.
Procedimiento y dispositivo de simulación para la medición de un componente y la optimización de la medición real correspondiente.
(17/01/2018). Solicitante/s: KUKA ROBOTER GMBH. Inventor/es: HAAG, MICHAEL, BONGARDT, THOMAS, BERNHARD,Christian.
Procedimiento para la medición de una característica de un componente , con los pasos:
a) la preparación de una situación de medición con un dispositivo de detección y con el componente ; b) la medición de la característica con el dispositivo de detección;
c) la preparación (S10, S20) de una situación de medición virtual con un modelo virtual (1') del dispositivo de detección y con un modelo virtual (2.1') de la característica ; y
d) la medición virtual (S30) del modelo de característica (2.1') con el modelo de dispositivo de detección (1'), caracterizado porque la medición virtual comprende una toma de imagen virtual (S30) de una imagen, reflejada por la característica virtual (2.1') y detectada por el dispositivo de detección virtual (1'), de un patrón (3') reflejado por la característica virtual (2.1'), siendo proyectado virtualmente el patrón reflejado (3') sobre la característica virtual (2.1') por al menos un emisor.
PDF original: ES-2663537_T3.pdf
Un proyector de disco Placido de luz LED para un sistema de topografía de córnea.
(03/01/2018) Un proyector para topografía de córnea adaptado para proyectar una imagen en la córnea de un ojo (E) de un paciente que se va a examinar, comprendiendo el proyector un cuerpo en forma de disco con una configuración parabólica, cónica o similar, hecha de un material translúcido y que tiene una superficie cóncava frontal sobre la cual se forma un patrón negro o generalmente opaco, teniendo dicho patrón una correspondencia con dicha imagen, y medios de iluminación dispuestos en un lado opuesto de dicho cuerpo con respecto a dicha superficie frontal, comprendiendo dichos medios de iluminación una pluralidad de elementos de iluminación dispuestos…
Procedimiento y dispositivo para determinar las coordenadas-3D de un objeto.
(15/11/2017). Solicitante/s: Carl Zeiss Optotechnik GmbH. Inventor/es: MAYER, THOMAS, DAXAUER,HERBERT, STEINBICHLER,MARCUS, BASEL,MARKUS.
Procedimiento para determinar las coordenadas-3D de un objeto , en el que un patrón de franjas es proyectado por un proyector sobre el objeto , la luz reflejada por el objeto es registrada por una cámara y son evaluadas las tomas registradas por la cámara , y se registran marcas de referencia sobre y/o junto al objeto por una cámara de referencia , que tiene un campo de visión mayor que la cámara , caracterizado por que una única cámara de referencia está conectada con la cámara o con un sensor-3D , que comprende el proyector y la cámara.
PDF original: ES-2651626_T3.pdf
Método y aparato para determinar la cantidad de luz dispersada en un sistema de visión artificial.
(25/10/2017) Un método para determinar la cantidad de luz dispersada en un objeto en un sistema de visión artificial, que comprende:
- iluminar dicho objeto con luz incidente que tiene una extensión limitada, al menos en una dirección, usando una fuente de luz ; y,
- detectar la luz que emana de dicho objeto usando un sensor de imágenes , en donde dicha luz emanada es luz reflejada (R) en la superficie de dicho objeto y luz dispersada (S) en dicho objeto , dando dicha luz detectada como resultado al menos una curva de distribución de intensidad en dicho sensor de imágenes , que tiene un pico en el que dicha luz reflejada (R) se detecta en dicho sensor de imágenes ,
…
Medición de características asistida por proyección usando una cámara no calibrada.
(04/10/2017) Un sistema de visión para medir una característica de un artículo , que comprende:
un proyector de láser configurado para proyectar una plantilla de escala y un patrón de medición sobre el artículo , incluyendo la plantilla de escala 80) al menos un elemento de plantilla que tiene una longitud predeterminada, superponiéndose el patrón de medición a la característica ; una cámara configurada para registrar una imagen que contiene la característica , la plantilla de escala y el patrón de medición , estando compuesta la imagen por una pluralidad de píxeles ;
caracterizado por que
el sistema de visión comprende adicionalmente: un procesador configurado para determinar un factor de escala de imagen de la imagen basándose en la plantilla de escala, siendo el factor…
Sistema de inspección de defectos en lentes de proyectores de vehículos.
(25/07/2017). Solicitante/s: UNIVERSIDAD DE JAEN. Inventor/es: GAMEZ GARCIA,JAVIER, GOMEZ ORTEGA,JUAN, SÁNCHEZ GARCÍA,ALEJANDRO, SATORRES MARTÍNEZ,SILVIA, ILLANA RICO,Sergio, CÁCERES MORENO,Óscar.
Perfeccionamiento en la solicitud de patente número P200930628 titulada "sistema de iluminación activo binario" donde en el sistema de iluminación comprende una fuente de iluminación , medios capaces de generar un patrón binario de franjas luminosas y oscuras alternantes y un sistema de visión por computador enfrentado dichos medios de manera que entre la fuente y los medios para generar el patrón queda definida una zona de inspección destinada a albergar una lente a inspeccionar. El sistema está provisto dos carcasas (2a, 2b) que comprenden dos placas de circuito impreso (PCB) a ambos lados de la zona de inspección, estando provista cada plaza de una pluralidad de LEDs, y teniendo cada carcasa un actuador lineal y un mecanismo de giro de manera que la distancia y el ángulo entre los LEDs y la zona de inspección son variables.
PDF original: ES-2626487_B1.pdf
PDF original: ES-2626487_A1.pdf
(28/06/2017) Procedimiento de determinación de la extensión de una trayectoria (R) en un volumen espacio-temporal de imágenes (Vm) de medición de un objeto de medición, cuya extensión de la trayectoria es para su uso por parte de un procedimiento de medición, en el que dicho volumen espacio-temporal de imágenes (Vm) de medición es generado por dicho procedimiento de medición utilizando un sistema de medición que comprende una primera fuente de luz y un sensor , en el que dicho procedimiento de medición comprende una etapa de, en un estado de funcionamiento predeterminado de dicho sistema de medición, mover el objeto de medición a lo largo de una primera dirección (Y) de movimiento…
Aparato de medición y método para la inspección de rango.
(31/05/2017) Un método para medir características tridimensionales de un objeto que utiliza adquisición y análisis de datos de rango, que comprende las etapas de:
o proporcionar medios para configurar la adquisición y el análisis de datos de rango antes de iniciar la medición;
o crear una imagen del mencionado objeto al detectar la luz reflejada desde el mencionado objeto utilizando al menos un sensor que comprende píxeles;
o adquirir datos de rango del mencionado objeto a partir de la imagen creada medida en unidades de píxeles del sensor (u, v);
o convertir los datos de rango adquiridos desde los valores de píxeles (u, v) del sensor hasta coordenadas universales (x, z);
caracterizado por que el método además comprende las etapas de:
o rectificar los datos de rango calibrados al remuestrear…
Recepción de máscara espacial afín e invariante para la detección de profundidad activa.
(01/03/2017) Un procedimiento para descodificar una contraseña, que comprende:
transmitir, a través de un dispositivo transmisor, al menos una porción de una máscara de código compuesta proyectada sobre la superficie de un objeto objetivo, la máscara de código compuesta definida por
una capa de código de contraseñas espacialmente codificadas con identificación única definidas por
una pluralidad de símbolos y
una capa de soporte determinable independientemente y distinta de la capa de código y que incluye
una pluralidad de objetos de referencia que son resistentes a la distorsión tras la proyección;
obtener, por medio de un detector receptor, al menos una porción de la máscara de código compuesta reflejada desde la superficie del objeto objetivo;…
Dispositivo sensor de imagen y sistema de medición para proporcionar datos de imagen e información acerca de características 3D de un objeto.
(11/01/2017) Un método, realizado por un dispositivo sensor de imagen, para proporcionar datos de imagen relativos a una imagen de un objeto , comprendiendo el dispositivo sensor de imagen un sensor de imagen que tiene una zona sensible para detectar luz, en donde el método comprende:
- definir regiones de interés "ROI" (301a-303a) en la zona sensible , solapando parcialmente cada ROI (301a; 302a; 303a) una o varias de las otras ROI (301a-303a),
- exponer las ROI (301a-303a) individualmente a luz proveniente del objeto y en donde se exponen las ROI (301a-303a) de manera que todos los píxeles pertenecientes a una misma ROI comienzan y terminan su exposición al mismo tiempo,
- leer datos parciales de imagen pertenecientes a grupos de datos parciales de imagen, los grupos respectivamente…
Procedimiento y dispositivo para determinar la profundidad de la superficie de un objeto de prueba.
(28/12/2016). Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: RENTSCHLER,PETER, SCHICK,ANTON.
Procedimiento para determinar la profundidad de la superficie de un objeto de prueba, en el que se proyecta un patrón de líneas de color formado por una secuencia de líneas de color sobre una superficie del objeto de prueba, en el que se registra un patrón de líneas reflejado desde la superficie del objeto de prueba y se evalúa mediante un dispositivo de evaluación, en donde el patrón de líneas de color y el dispositivo de evaluación están conformados de tal manera que la determinación de la profundidad de la superficie del objeto de prueba se realiza mediante la sucesión de líneas de color del patrón de líneas reflejado y mediante una sucesión de anchos de las líneas del patrón de líneas reflejado.
PDF original: ES-2669344_T3.pdf
Sistemas de detección de profundidad activos de luz estructurada que combinan múltiples imágenes para compensar las diferencias de reflectividad y/o absorción.
(30/11/2016). Solicitante/s: QUALCOMM INCORPORATED. Inventor/es: BAUZA,JUDIT MARTINEZ, ATANASSOV,KALIN MITKOV, GOMA,SERGIU RADU.
Un procedimiento para compensar las diferencias en la reflectividad superficial en un sistema de detección de profundidad activo mediante luz estructurada, comprendiendo el procedimiento:
obtener (506a, 514a, 606a), a partir de uno o más sensores receptores , una pluralidad de imágenes de una escena sobre la que una máscara de código se proyecta (504a, 604a) utilizando una fuente de luz , comprendiendo la máscara de código una pluralidad de partes únicas de código espacial, en el que la pluralidad de imágenes es capturada por los uno o más sensores receptores utilizando dos o más tiempos de exposición; y
combinar la pluralidad de imágenes mediante la extracción de partes decodificables de la máscara de código de cada imagen entre la pluralidad de imágenes, para generar una imagen combinada.
PDF original: ES-2617831_T3.pdf
Aparato de escaneo de enfoque.
(24/08/2016) Un escáner para la obtención y/o la medida de la geometría 3D de al menos una parte de la superficie de un objeto, comprendiendo el citado escáner:
- al menos una cámara que contiene una matriz de elementos sensores,
- un medio para generar una luz de sondeo que incorpora un patrón espacial,
- un medio para transmitir la luz de sondeo hacia el objeto, iluminando por ello al menos una parte del objeto con el citado patrón en una o más configuraciones,
- un medio para transmitir al menos una parte de la luz devuelta desde el objeto a la cámara ,
- un medio para variar la posición del plano de enfoque del patrón sobre el objeto aun manteniendo una relación espacial fija entre el…
Procedimiento y patrón de luz para medir la altura o el curso de la altura de un objeto.
(29/06/2016) Procedimiento para medir la altura o el curso de la altura de un objeto , comprendiendo el procedimiento las etapas de procedimiento siguientes:
proyectar un patrón de luz en forma de unos elementos de imagen codificados consecutivos en una extensión en la dirección de un eje transversal (X) sobre el objeto mediante una fuente de luz ,
en el que los elementos de imagen presentan, en cada caso, por lo menos una característica de codificación y definen juntos una palabra de código ,
en el que los grupos de elementos de imagen de una secuencia de un número predeterminado de elementos de imagen consecutivos definen, en cada caso, unas palabras de código parciales unívocas e individuales, que existen exactamente una vez dentro de la palabra de código ,
en el que los grupos de elementos de imagen directamente adyacentes…
Proyector de luz estructurada y escáner tridimensional que incluye tal proyector.
(22/06/2016) Un proyector de luz estructurada que comprende sucesivamente:
- una fuente de luz configurada para emitir un haz de un espectro continuo entre una longitud de onda mínima (λmin) y una longitud de onda máxima (λmax),
- un sistema óptico de descomposición espectral , configurado para captar el espectro del haz emitido por la fuente y descomponerlo espectralmente con una imagen del haz en la longitud de onda mínima (λmin) contigua a una imagen del haz en la longitud de onda máxima (λmax) en al menos un plano predeterminado transversal a un camino óptico del haz y a lo largo de una línea de este plano que constituye una frontera,
- un dispositivo de codificación configurado para codificar el espectro…
Instalaciones para pintura de objetos.
(20/04/2016) Un aparato para pintar un objeto , en particular, una parte de carrocería de automóvil, comprendiendo dicho aparato:
- un cabezal de pintura provisto de al menos una boquilla de pulverización dispuesta para proporcionar un flujo de pintura de un color predeterminado sobre una superficie de dicho objeto ;
- un medio de desplazamiento para desplazar dicho cabezal de pintura en un espacio de trabajo, teniendo dicho medio de desplazamiento al menos dos grados de libertad;
caracterizado por cuanto que comprende, además:
- un dispositivo de identificación para identificar la forma tridimensional de dicha superficie de dicho objeto, siendo dicho dispositivo…
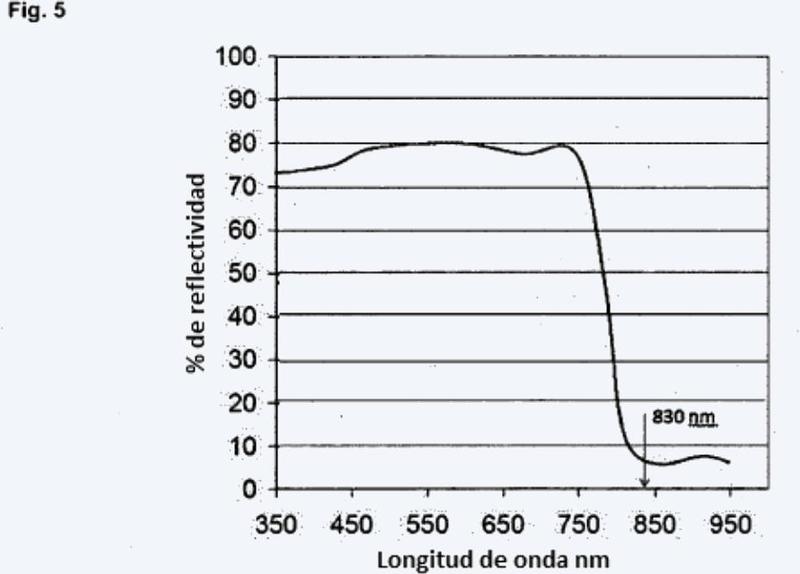
(16/03/2016). Ver ilustración. Solicitante/s: Van de Velde NV. Inventor/es: DE RIJCK,ROEL, LAAN,DOMINICUS, VERMEIRE,LIEVE, VAN DER BIEST,GEERT, BAL,MICHAEL, DOTREMONT,SABINE, VERBEEREN,TIM.
Un dispositivo de medición tridimensional para uso en un probador de prendas que comprende al menos unos medios de captura de imagen, un proyector, un espejo con longitud de onda especifico caracterizado porque dichos medios de captura de imagen se ubican detrás de dicho espejo con longitud de onda específica, y caracterizados por que dicho espejo con longitud de onda especifica se configura para transmitir al menos el 70% de la luz infrarroja con longitudes de onda de al menos 750 nm y para reflejar al menos el 70% de las longitudes de onda de luz visible desde aproximadamente 380 nm a aproximadamente 740 nm.
PDF original: ES-2572689_T3.pdf
Método y dispositivo de un sistema de medición.
(02/03/2016) Procedimiento para representar las características de un objeto por medio de un sistema de medición, en el que el sistema de medición y/o el objeto se desplazan uno con relación al otro en una dirección predefinida de desplazamiento, siendo desplazado preferentemente el objeto con relación al sistema de medición, en cuyo procedimiento el objeto se ilumina por medio de una luz incidente, que tiene una extensión limitada en la dirección del desplazamiento, y la luz reflejada desde el objeto se detecta por medio de un sensor de imagen dispuesto en el mismo lado del objeto como la luz incidente, convirtiendo el sensor de procesamiento de la imagen la luz detectada en cargas eléctricas, según lo cual se crea una representación digital del objeto , caracterizado porque, la luz se lleva a chocar con el objeto a una distancia predeterminada desde…
Incremento dinámico en la triangulación codificada por colores.
(17/02/2016) Disposición para la triangulación codificada por colores de un objeto a medir, que comprende una unidad de proyector para proyectar un patrón de colores sobre una superficie de objeto del objeto a medir, al menos una cámara con un sensor de cámara , para muestrear una proyección del patrón de colores proyectado sobre la superficie, en donde el sensor de cámara es sensible a la luz en una primera, en al menos una segunda y una tercera región espectral , en donde las regiones espectrales sensibles están dispuestas según longitudes de onda ascendentes, en donde la disposición comprende al menos un filtro de color que presenta una primera, al menos una segunda y una tercera región de transmitancia espectral , en donde las regiones de transmitancia espectral están separadas por parejas, en donde una longitud…
Método para determinar características del material de un objeto.
(10/02/2016) Método para determinar características del material de un objeto que son propiedades ópticas del objeto, donde son determinadas utilizando un sistema de medición 3D confocal para determinar datos de medición espectralmente selectivos del objeto, caracterizado porque se utiliza un sistema de medición 3D confocal de dispersión de color, y porque los datos de medición del objeto espectralmente selectivos, determinados con el sistema de medición 3D confocal, se computan con datos espectralmente selectivos de un cuerpo de referencia, donde en base a los mismos puntos de medición se determinan varios datos espectralmente selectivos, donde el sistema de medición…
Sistema de reconocimiento visual para etiquetado de productos.
(19/08/2015) Un método de reconocimiento visual para su uso con una máquina etiquetadora de productos automática y de alta velocidad, en el que un transportador suministra artículos de producción a lo largo de un eje A-A hacia dicha máquina etiquetadora, en el que cada artículo de producción tiene una porción de domo (131a) de su superficie que se encuentra en la máxima altura de la superficie de dicho artículo de producción por encima de dicho transportador, comprendiendo las etapas de:
generar una lámina de luz desde una fuente de láser u otra fuente de luz de alta intensidad, dirigir dicha lámina de luz transversalmente a dicho eje A-A de dicho transportador,
provocar que dicha lámina de luz…
Dispositivo de medición de lente.
(03/06/2015) Procedimiento para remarcar o resaltar la forma de un contorno de una lente oftálmica previamente mecanizada, que incluye las operaciones consistentes en:
• iluminar una cara óptica de la lente por medio de un haz luminoso plano para formar sobre esta cara una mancha luminosa 5 lineal, de manera que el haz desborde de dicha cara e ilumine dicho contorno ;
• formar sobre medios de recepción óptica una imagen de dicha mancha luminosa ;
• arrastrar en rotación la lente alrededor de un eje (A);
• barrer el contorno por medio del haz luminoso ;
• remarcar conjuntamente sobre los medios…
Dispositivo óptico para observar los detalles estructurales milimétricos o submilimétricos de un objeto con comportamiento especular.
(21/01/2015) Dispositivo para la observación, mediante reflexión o transmisión, de detalles estructurales milimétricos o submilimétricos de un objeto , que presenta un comportamiento que es por lo menos parcialmente especular, situado en una zona de exposición , caracterizado por que el dispositivo incluye:
- por lo menos una fuente de radiación con una superficie de emisión real o virtual que difunde la radiación procedente de la fuente y que presenta por lo menos dos regiones diferenciadas que emiten flujos de radiación, siendo por lo menos una de las características de la radiación diferente de una región a la siguiente,
- un sistema de proyección óptico que está situado en la trayectoria de la radiación,…
Aparato y método para la medición en línea industrial de la topografía micrométrica y de la ondulación de productos en movimiento.
(19/11/2014) Sensor de microscopio para llevar a cabo un método para medir sin contacto la ondulación (Wa), con un valor de corte elevado de 5 mm, de una superficie en movimiento, que comprende:
- un microscopio industrial que tiene un aumento adecuado para obtener un campo de visión de imagen en el intervalo de 1.000 μm y/o una resolución de al menos 0.5 μm, una distancia de trabajo mayor de 10 mm y una profundidad de campo mayor de 15 μm;
- una fuente de láser pulsado en el orden de nanosegundos con una frecuencia de al menos V/(FOV-O) en s-1, donde V es la velocidad máxima de la superficie, en m/s, FOV es el campo de visión en la dirección de desplazamiento, en m y O es la superposición entre imágenes consecutivas en m, para emitir…
Procedimiento de inspección de superficies para la detección de defectos de la superficie y/o medir la topografía de la superficie.
(10/09/2014) Procedimiento de inspección de superficies para la detección de defectos de la superficie y/o medir la topografía de la superficie de superficies continuamente reflectantes, especialmente superficies reflectantes de bandas de metal, especialmente bandas de metal en movimiento, en el que
- una cámara hace una toma de una muestra representada sobre una pantalla, que está diseñada de tal manera que representa como minimo puntos de corte de líneas, en donde
- la dirección visual de la cámara está dirigida hacia una zona de la superficie reflectante y
- la superficie de la pantalla sobre la que está representada la muestra está situada y orientada hacia esa zona de tal manera que el paso de rayos de los rayos visuales…
Dispositivo Escáner de Contorno de objetos.
(28/08/2014) 1. Dispositivo escáner de contorno de objetos caracterizado porque está constituido por una estructura soporte sobre el cual se dispone un elemento móvil de haz de luz que mediante un elemento de lente convergente colimada hace que los rayos del haz pasen a ser paralelos proyectando una línea sobre el objeto escaneado y mediante un elemento de recepción móvil el cual recibe la línea del contorno se recoge a través de una cámara para su procesamiento informático en el hardware del dispositivo conectado a un ordenador.
2. Dispositivo escáner de contorno de objetos según la reivindicación 1 en el cual el haz de luz es un dispositivo laser que emite la línea y que mediante la lente convergente colimada pasa a ser una luz láser paralelo.
3. Dispositivo escáner de contorno de objetos según reivindicaciones anteriores, caracterizado porque dispone…
Procedimiento para determinar la geometría axial de un vehículo.
(07/05/2014) Procedimiento para determinar la geometría axial de un vehículo, en donde se proyecta luz sobre una rueda de vehículo analizándose la luz reflejada de manera difusa a fin de determinar a partir de ella la orientación del plano de la rueda de vehículo ,
- proyectando varias líneas de una luz de láser generada mediante varias fuentes de luz de láser sobre la rueda , incrementando o desvaneciendo en sucesión temporal líneas individuales o varias de estas líneas, pudiéndose controlar individualmente las fuentes de luz de láser , capturándose la luz de láser reflejada de manera difusa de las líneas mediante una o mediante varias cámaras y analizándose mediante fotogrametría estéreo o determinándose…
Método y aparato para generar textura en una escena tridimensional.
(26/02/2014) Un método de formación de imágenes en 3D implementado en un aparato que incluye un sistema de formación de imágenes de múltiples vistas estereoscópico o de otro tipo, comprendiendo dicho método la monitorización de un volumen definido por un límite de monitorización configurado basado en:
en un modo de tiempo de ejecución:
capturar datos de imágenes de múltiples vistas de un campo de visión correspondiente a dicho volumen monitorizado, utilizando múltiples sensores respectivos del sistema de formación de imágenes de múltiples vistas que tiene vistas superpuestas del volumen definido;
determinar las posiciones de los objetos que entran en el campo de visión mediante el procesamiento de los datos de las imágenes a partir de…
Sistema y método de deflectometría de transformada de Fourier.
(25/12/2013) Un método de deflectometría para la inspección óptica de un objeto de fase y amplitud colocado en uncamino óptico entre una única retícula y un sistema de imágenes , dicho objeto de fase y amplitud que estáa una distancia h de la retícula en una primera posición, la retícula que forma un patrón periódico basado encontraste con: las frecuencias espacialesm 0, v0, respectivamente, en los ejes ortogonales x, y en un plano deimagen, el sistema de imágenes que comprende un objetivo y un sensor de imágenes que tiene unapluralidad de elementos fotosensibles, en donde dichas frecuencias espaciales m 0, v0 no son mayores que la mitadde las…
Dispositivo de control para productos alimenticios y su utilización.
(24/10/2013) Dispositivo de control para productos alimenticios para la identificación y/o para la clasificación de productosalimenticios envasados en una bandeja, que comprende una zona de posicionamiento, un dispositivo de iluminaciónpara la iluminación del producto alimenticio con luz blanca, al menos una cámara para el registro de imágenes delproducto alimenticio iluminado y un dispositivo de evaluación para el procesamiento de imágenes, en el que eldispositivo de evaluación realiza un reconocimiento de los productos alimenticios por medio de un análisis del colory/o de un análisis de la claridad de las imágenes registradas por la cámara, caracterizado…
Instalación de pintado con una celda de medición para la medición del grosor de capa.
(17/10/2013) Instalación de pintado para el pintado en serie de componentes , en especial de carrocerías de vehículosautomóviles, con
a) por lo menos una celda de pintado , en la que los componentes son revestidos con una pinturacon un grosor de capa (dIST) determinado,
b) por lo menos una celda de medición para la medición del grosor de la capa (dIST) de la pintura sobre loscomponentes mediante por lo menos una fuente de radiación para la 10 irradiación de loscomponentes revestidos y con por lo menos un detector de radiación para la detección de laradiación reflejada por los componentes irradiados, para determinar a partir de ella el grosor de la capa(dIST), así como con
c) un recorrido de transporte , a lo largo del cual…
Sensor para la medición de la superficie de un objeto.
(02/10/2013) Sensor para la medición de la superficie de un objeto con una unidad de contraste para la proyección de unpatrón sobre la superficie del objeto, con una cámara para el registro del patrón proyectado sobre la superficiedel objeto así como con espejos de desviación en una carcasa , en el que la unidad de contraste presenta un proyector y en el que a la cámara y al proyector están asociados, respectivamente, espejosde desviación , que están dispuestos en los extremos, opuestos en la dirección longitudinal del sensor , dela carcasa del sensor , caracterizado porque el proyector es un proyector de LED y porque la cámara yel proyector de LED están dispuestos en disposición longitudinal sobre un eje óptico coincidente en la carcasa del sensor y porque en el sensor está…
{kind=link}