Sensor para la medición de la superficie de un objeto.
Sensor para la medición de la superficie de un objeto con una unidad de contraste (3) para la proyección de unpatrón sobre la superficie del objeto,
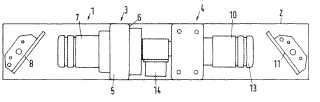
con una cámara (4) para el registro del patrón proyectado sobre la superficiedel objeto así como con espejos de desviación (8, 11) en una carcasa (2), en el que la unidad de contraste (3)presenta un proyector (5) y en el que a la cámara (4) y al proyector (5) están asociados, respectivamente, espejosde desviación (8, 11), que están dispuestos en los extremos, opuestos en la dirección longitudinal del sensor (1), dela carcasa (2) del sensor (1), caracterizado porque el proyector es un proyector de LED (5) y porque la cámara (4) yel proyector de LED (5) están dispuestos en disposición longitudinal sobre un eje óptico coincidente en la carcasa (2)del sensor (1) y porque en el sensor (1) está integrada una iluminación de la superficie (14), de manera que lailuminación de la superficie (14) está posicionada en la dirección longitudinal en el centro de la carcasa (2) y elproyector de LED (5) y la cámara (4) están dispuestos sobre ambos lados de la iluminación de la superficie (14).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2005/006300.
Solicitante: ISRA VISION SYSTEMS AG.
Nacionalidad solicitante: Alemania.
Dirección: INDUSTRIESTRASSE 14 64297 DARMSTADT ALEMANIA.
Inventor/es: ERSU, ENIS, LAMBERT,GEORG.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/25 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
PDF original: ES-2441415_T3.pdf
Fragmento de la descripción:
Sensor para la medición de la superficie de un objeto La invención se refiere a un sensor para la medición de la superficie de un objeto con una unidad de contraste para la proyección de un patrón sobre la superficie del objeto así como con una cámara para el registro del patrón proyectado sobre la superficie del objeto de acuerdo con el preámbulo de la reivindicación 1. Este sensor es adecuado con una unidad de evaluación que se puede conectar en el sensor o que está integrada en el sensor para el principio de medición de la triangulación.
Ya se conocen tales sensores que trabajan de acuerdo con el principio de la triangulación. Éstos utilizan láser como unidad de contraste y proyectan para el contraste una franja sobre la superficie de dimensionar. Este principio básico se conoce, por ejemplo, a partir del documento US 6.256.099 B1 0 DE 44 02 414 A1. A través de la evaluación de la franja recibida por la cámara se pueden calcular puntos tridimensionales a lo largo de una curva, que permiten sacar conclusiones sobre la estructura de la superficie. En los sensores conocidos hasta ahora es un inconveniente que éstos presentan, en virtud del láser para la generación de la franja de contraste una forma de realización grande. A través de la luz láser existen, además, riesgos para la seguridad para las personas que se encuentran en la zona de medición, cuando la luz láser incide sobre la retina. Además, los láseres son aparatos ópticos sensibles, de manera que los sensores conocidos reaccionan de manera sensible a vibraciones y, en general, no son robustos.
Se conoce a partir del documento DE 298 16 344 U1 un dispositivo similar para el análisis de medición tridimensional óptico sin contacto, en el que en una carcasa de sensor están previstos un proyector configurado, por ejemplo, como iluminación LED y una cámara. Mientras que el proyector está dispuesto transversalmente a la dirección de radiación y la imagen de proyección se desvía sobre un espeso desde la carcasa, la cámara está dispuesta con su eje óptico en la dirección de radiación. Esto conduce a una carcasa de sensor alta, que puede colisionar fácilmente con la instalación de desplazamiento, en la que está fijada o bien limita su recorrido de ajuste.
Se conoce a partir del documento DE 197 42 264 A1 un endoscopio para la detección tridimensional óptica de objetos con una instalación de registro y con una instalación de iluminación configurada como proyector, que están dispuestas a lo largo del eje longitudinal de la carcasa del endoscopio. La imagen de proyección y la imagen de registro salen a través de un orificio común desde el endoscopio o bien entran en éste. De esta manera, se crea una disposición de medición compacta, que posibilita una detección tridimensional de un objeto también en lugares inaccesibles. En el documento US 2001/0038705 A1 se describe un principio óptico similar para un sistema de escaneo, en el que una imagen proyectada y una imagen registrada salen y entran a través de un orificio común. En virtud de esta disposición óptica, sin embargo, no es posible un dimensionado exacto del objeto.
El documento DE 40 34 007 A1 publica un dispositivo para la detección óptica de estructuras superficiales en dientes, en el que un diente recubierto con color fluorescente es dimensionado ópticamente con una cámara 3D, siendo dirigido por medio de una fuente de luz adaptada al color fluorescente, por ejemplo un LED, un haz de rayos de luz sobre una trayectoria de los rayos de protección que presentan un prisma sobre la superficie del diente. En la trayectoria de los rayos de proyección puede estar dispuesta una máscara de rejilla. La luz dispersa retornada por la superficie es acoplada a través de un divisor del rayo en una trayectoria de los rayos de observación desplazada con relación a la trayectoria de los rayos de proyección y es desviada sobre la cámara 3D. En el canal de salida de la luz común para la radiación de proyección y la radiación de observación están dispuestos un prisma extendido alargado y una lente.
En el documento DE 196 36 354 A1 se describe una disposición similar para registros ópticos en la representación y dimensionado de un objeto, en la que dos fuentes de rayos y una cámara están dispuestos adyacentes entre sí, de tal manera que las dos fuentes de luz para la iluminación del objeto y del rayo de observación de la cámara a través del mismo paso de los rayos formado por un prisma son desacopladas de la disposición o bien son acopladas en la disposición. Los ejes ópticos de las fuentes de rayos y de la cámara están dispuestos de manera correspondiente en cada caso en ángulo entre sí. En las dos fuentes de rayos se trata de una iluminación de la superficie y de un proyector de patrón.
Se conoce a partir del documento US 6.815.003 un escáner de perfiles para la determinación de la forma y del tamaño de la superficie de un objeto. El sistema presenta un proyector de láser para la proyección de una franja patrón codificada espacialmente con una anchura de 0, 04 pulgadas sobre el objeto, para escanear por líneas el objeto móvil. A tal fin, se desvía la franja de la luz sobre un espejo dispuesto en un extremo del escáner de perfiles y se proyecta sobre el proyecto a través de una máscara dispuesta en la salida de la luz del escáner de perfiles. La luz proyectada es dispersada de forma difusa en el objeto, de manera que una parte de la luz llega a través de una ventana al escáner de perfiles, allí es desviada en un espejo dispuesto en el otro extremo del escáner de perfiles y es registrada por una cámara configurada como matriz-CCD. La cámara y el proyector láser están dispuestos desplazados entre sí en una dirección perpendicular a sus ejes ópticos respectivos.
Por lo tanto, el cometido de la invención es proponer un sensor del tipo mencionado al principio, que está constituido compacto y es robusto en la aplicación y posibilita una alta exactitud durante el dimensionado.
Este cometido se soluciona en un sensor del tipo mencionado al principio con las características de la reivindicación 1. La unidad de contraste presenta en este caso un proyector de LED. Los LEDs (Diodos Emisores de Luz) se pueden activar en comparación con un láser a través de una electrónica menos costosa, que puede estar integrada de acuerdo con la invención al mismo tiempo en el sensor, y además, son más económicos. Los LEDs son insensibles frente a las vibraciones y oscilaciones de la temperatura y la luz generada es menos peligrosa para el ojo humano. A través del empleo de un proyector de LED se crea, por lo tanto, un sensor pequeño y que se puede emplear de una manera flexible para la medición de la superficie, que es activo también, por ejemplo, para ser montado sobre un robot, con las cargas implicadas con ello. Además, la cámara y el proyector de LED están dispuestos en disposición longitudinal en la carcasa del sensor. Por lo tanto, ésta presenta una altura de construcción sólo reducida y está constituida aproximadamente de forma rectangular en la sección transversal. Para lanzar la imagen de proyección desde la carcasa y para registrar su imagen sobre el objeto, a la cámara y al proyector están asociados, respectivamente, unos espejos de desviación, que están dispuestos en los extremos opuestos en la dirección longitudinal del sensor y que desacoplan la imagen de proyección desde el sensor y acoplan su imagen de recepción en el sensor. Si los ejes ópticos de la proyección y del registro de imágenes en esta disposición presentan la distancia máxima posible, el resultado de la medición presenta la exactitud máxima posible.
Se puede conseguir una proyección de alta calidad a través de un proyector de LED, que presenta un LD de alta potencia, una lente de Fresnell y máscaras para la generación del patrón.
El patrón proyectado puede estar constituido, por ejemplo, por una o varias franjas. Para poder determinar no sólo puntos tridimensionales a lo largo de una curva, el patrón de acuerdo con la invención puede estar constituido por varias franjas o presentar estas franjas. De manera alternativa, también se pueden utilizar otros patrones superficiales. De esta manera, se pueden obtener, por ejemplo por medio de triangulación datos de puntos tridimensionales de una superficie, de manera que con la ayuda de la pluralidad de franjas o bien del patrón de la superficie se puede calcular una superficie tridimensional. A tal fin se calibra el proyector de LD de forma correspondiente, para obtener un modelo de la posición del patrón de la franja o bien del patrón de la proyección en el espacio.
Los datos tridimensionales de la superficie se pueden calcular entonces por una unidad de evaluación,... [Seguir leyendo]
Reivindicaciones:
1. Sensor para la medición de la superficie de un objeto con una unidad de contraste (3) para la proyección de un patrón sobre la superficie del objeto, con una cámara (4) para el registro del patrón proyectado sobre la superficie del objeto así como con espejos de desviación (8, 11) en una carcasa (2) , en el que la unidad de contraste (3) presenta un proyector (5) y en el que a la cámara (4) y al proyector (5) están asociados, respectivamente, espejos de desviación (8, 11) , que están dispuestos en los extremos, opuestos en la dirección longitudinal del sensor (1) , de la carcasa (2) del sensor (1) , caracterizado porque el proyector es un proyector de LED (5) y porque la cámara (4) y el proyector de LED (5) están dispuestos en disposición longitudinal sobre un eje óptico coincidente en la carcasa (2) del sensor (1) y porque en el sensor (1) está integrada una iluminación de la superficie (14) , de manera que la iluminación de la superficie (14) está posicionada en la dirección longitudinal en el centro de la carcasa (2) y el proyector de LED (5) y la cámara (4) están dispuestos sobre ambos lados de la iluminación de la superficie (14) .
2. Sensor de acuerdo con la reivindicación 1, caracterizado porque el proyector de LED (5) presenta un LED de alta potencia, una lente de Fresnell y una cámara para la generación del patrón.
3. Sensor de acuerdo con la reivindicación 1 ó 2, caracterizado porque el patrón presenta varias franjas y/o está constituido por otro patrón superficial.
4. Sensor de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el patrón está codificado.
5. Sensor de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el proyector de LED (5) está montado de forma giratoria y, dado el caso, se puede amarrar.
6. Sensor de acuerdo con una de las reivindicaciones anteriores, caracterizado porque en la iluminación de la superficie está dispuesta una iluminación de la superficie de LED (14) .
7. Sensor de acuerdo con una de las reivindicaciones anteriores, caracterizado porque un espejo de desviación (8, 11) está dispuesto móvil.
8. Sensor de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la cámara (4) y/o el proyector de LED (5) presentan un objetivo (7, 10) sustituible y/o un filtro (13) .
9. Sensor de acuerdo con una de las reivindicaciones anteriores, caracterizado porque al proyector de LED (5) y/o a la iluminación de la superficie (14) está asociado un control de la iluminación para una iluminación duradera y/o un modo de destello.
10. Sensor de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el proyector de LED (6) y/o la iluminación de la superficie (14) son conmutables de forma separada entre sí.
11. Sensor de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el proyector de LED (5) , la iluminación de la superficie (14) , la cámara (4) y/o una instalación de evaluación se pueden conmutar con pulso de reloj de aproximadamente 1 a 50 ms.
12. Sensor de acuerdo con una de las reivindicaciones anteriores, caracterizado porque en el sensor (1) está integrada una electrónica con un microprocesador para la identificación automática del sensor (1) a través de una memoria electrónica, para la comunicación del sensor (1) con una unidad de conexión y/o para la compensación de la temperatura y la administración de los datos de calibración.
13. Sensor de acuerdo con una de las reivindicaciones anteriores, caracterizado porque los orificios de salida (9, 12, 15) asociados al proyector de LED (5) , a la cámara (4) y a la iluminación de la superficie (14) están dispuestos sobre un lado de la carcasa (2) .
14. Sensor de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la carcasa (2) del sensor
(1) está constituida de varias partes.
15. Sensor de acuerdo con la reivindicación 14, caracterizado porque la carcasa (2) del sensor (1) está constituida por dos partes de carcasa (2a, 2b) en forma de L, fijadas una sobre la otra.
16. Sensor de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la unidad de contrate (3) con el proyector de LED (5) y/o la cámara (4) presentan una carcasa (23) propia.
17. Sensor de acuerdo con una de las reivindicaciones 6 a 15, caracterizado porque la iluminación de la superficie de LED (14) presenta una carcasa (23) propia.
18. Sensor de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la carcasa (2) del sensor
(1) o partes de ella están constituidas de un material compuesto reforzado con fibras de vidrio.
Patentes similares o relacionadas:
Dispositivo y procedimiento para la detección sin contacto de estructuras de tejido rojas, así como disposición para desprender una banda de estructuras de tejido rojas, del 22 de Julio de 2020, de NORDISCHER MASCHINENBAU RUD. BAADER GMBH + CO KG: Dispositivo para la detección sin contacto de estructuras de tejido rojas en productos de carcasas de animales sacrificados, que comprende un equipo […]
Imagen detallada de video de la geometría de vía, del 17 de Junio de 2020, de VolkerRail Nederland BV: Tren de medición con un sistema óptico que cuenta con medios para realizar un registro de imágenes con una cámara y una lámpara, por ejemplo, imágenes detalladas de […]
Método y dispositivo de medida de planicidad de un producto metálico, del 3 de Junio de 2020, de Primetals Technologies Austria GmbH: Metodo de medida de planicidad de un producto metalico, en forma o bien de una banda o bien de una placa de una linea de tratamiento metalurgico, dicho producto […]
Transmisión de máscara espacial afín e invariante para la detección de profundidad activa, del 6 de Mayo de 2020, de QUALCOMM INCORPORATED: Un procedimiento operativo en un dispositivo transmisor para proyectar una máscara de código compuesta , que comprende: obtener […]
Sistema para la detección óptica de objetos, del 6 de Mayo de 2020, de Phenospex B.V: Sistema para la detección óptica de objetos, por medio de triangulación láser con una fuente para la generación de luz de una primera longitud de onda, donde […]
Sistema y método para la medición tridimensional de la forma de objetos materiales, del 15 de Abril de 2020, de Artec Europe S.a.r.l: Un sistema para la medición 3D de la forma de un objeto material , que comprende: un proyector de luz para proyectar un patrón de luz estructurado sobre […]
Equipo y procedimiento para la fabricación de piezas de prótesis dental, del 18 de Marzo de 2020, de INSTITUT STRAUMANN AG: Equipos de captación de superficies y equipos de generación de superficies, con equipos para la detección parcial o totalmente automática de bordes de preparaciones […]
Dispositivo y método para la medición óptica tridimensional de objetos fuertemente reflectantes o transparentes, del 22 de Enero de 2020, de Aimess GmbH: Dispositivo para la medición tridimensional de un objeto, que comprende: una primera instalación de proyección con una primera fuente de luz infrarroja (1a) para […]