CIP-2021 : G01C 21/16 : mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
CIP-2021 › G › G01 › G01C › G01C 21/00 › G01C 21/16[3] › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S).
G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
G01C 21/16 · · · mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
CIP2021: Invenciones publicadas en esta sección.
HERRAMIENTA INTELIGENTE PARA LA DETECCIÓN DE PERFORACIONES, CASCOTAS Y ABOLLADURAS EN TUBERÍAS DE TRANSPORTE.
(26/06/2014). Ver ilustración. Solicitante/s: ECOPETROL S.A. Inventor/es: LEAL DIAZ, GONZALO, PATIÑO REYES,Edgar Javier, BLANCO PINZON,Carlos Eduardo, PICO,Franz, TOVAR ACEVEDO,Carlos Eduardo, MENDOZA SEPÚLVEDA,César Camilo, NEIRA LÓPEZ,Oscar Sandy, PENALOZA BUENO,John Ivan.
La presente invención hace referencia a una herramienta de inspección en linea, diseñada para detectar perforaciones, soldaduras, cascotas, abolladuras y fisuras en tuberías de transporte de líquidos y gases. Esta herramienta utiliza la fuga de flujo magnético (MFL, por su sigla en inglés) como técnica de detección y viaja a través de la tubería impulsada por el flujo existente. Por medio del algoritmo interno que maneja, la herramienta tiene la posibilidad de procesar los datos en línea, es decir, decidir los datos importantes que deben presentarse en campo y así determinar la ubicación lineal de perforaciones, soldaduras, cascotas, abolladuras y fisuras.
Disposición de sensor inercial.
(12/03/2014) Disposición de sensor inercial, en particular para el montaje en un automóvil, con un módulo sensor colocadoen un soporte , que comprende un sensor inercial fabricado de acuerdo con la micromecánica y un circuito deevaluación, en la que el módulo sensor está dispuesto sobre una placa de montaje y está conectado a travésde un elemento de acoplamiento elástico, que está constituido de un material elastómero con el soporte y en la que el sensor inercial es un sensor de la velocidad de giro, que detecta la aceleración de Coriolis de unelemento sensor oscilante, caracterizada porque el soporte presenta una escotadura , porque la placa demontaje está dispuesta en la escotadura , y porque el soporte y la placa de montaje estánconectadas a lo largo de al menos…
Procedimiento y dispositivo para determinar la ubicación relativa, la velocidad y/o la aceleración de un cuerpo.
(25/09/2013) Procedimiento para determinar la ubicación relativa, la velocidad y/o la aceleración de un cuerpo movible en unespacio tridimensional, en donde se provee un número de n sensores de aceleración lineal que tienen, cada uno,un eje de medición sensible, en donde el número n es al menos doce, en donde los sensores individuales deaceleración lineal están dispuestos, cada uno, en una posición Pi de ubicación fija en relación con el cuerpo que se puede describir a través de un vector de posición estacionario , que apunta desde un punto dereferencia fijo en el cuerpo hacia la correspondiente posición Pi, en donde los sensores de aceleración lineal se alinean de manera que su eje de medición está orientado, en cada caso, en dirección de un vector dedirección , en donde i ε [1, 2, 3, 4,…
Método y aparato para determinar la posición de un objeto bajo el agua en tiempo real.
(09/09/2013) Un método para determinar una posición subacuática en tiempo real de un objeto, comprendiendo dicho métodolas etapas de:
tomar una muestra de una primera señal (X, Y, Z) correspondiente a dicha posición de dicho objeto a unaprimera frecuencia dada, con un error de posición medio igual a cero;
tomar una muestra de una segunda señal correspondiente a, al menos una de, velocidad (Vx, Vy, Vz) y unaaceleración (Ax, Ay, Az) de dicho objeto a una segunda frecuencia más alta que dicha primera frecuencia,dando lugar a un cálculo de posición con un error medio que no es igual a cero;
combinar dicha primera señal con dicha segunda señal para proporcionar dicha posición a dicha segundafrecuencia…
Dispositivo de seguimiento inercial, calzado y equipamiento de la persona dotada de un dispositivo de este tipo.
(15/07/2013) Dispositivo inercial de navegación destinado a equipar un objeto en apoyo de forma intermitente con unasuperficie, comportando, el dispositivo, una central inercial que tiene por lo menos un sensor inercial, y mediosde conexión mecánica entre la central inercial al objeto , caracterizado por el hecho de que, los medios deconexión están preparados para asegurar, entre la central inercial y el objeto , un acoplamientomecánico cuando el objeto no está apoyándose contra la superficie, y un desacoplamiento mecánico, cuando elobjeto está apoyándose contra la superficie, de tal forma que, la central inercial sea sensiblemente inmóvilcon respecto a la superficie, cuando el objeto está apoyándose contra la superficie.
Sistema de compensación de GPS / INS de un vehículo terrestre.
(13/03/2013) Sistema de navegación de un vehículo terrestre con:
un receptor del sistema de determinación de posición, que puede ser activado para generar
informaciones de posición y de dirección basadas en un sistema de determinación de posición global y alimentarlas a unsistema de compensación del sistema de referencia,
un sistema de compensación del sistema de referencia, que proporciona informaciones de posición ydirección corregidas, que está conectado con el receptor del sistema de determinación de posición y con un aparato de medida de la aceleración dispuesto para la medición de una aceleración lateral del vehículo terrestre para lamedición del ángulo de cabeceo del vehículo terrestre y con un giroscopio para la medición de un régimen deguiñada…
Procedimiento de ayuda al aterrizaje de una aeronave utilizando GPS y MLS en el marco de una aproximación axial calculada.
(18/04/2012) Procedimiento de ayuda a la aproximación y al aterrizaje de una aeronave que utiliza un sistema deposicionamiento por satélite y un sistema MLS en el marco de una aproximación axial calculada, comprendiendo elsistema MLS una pista de aterrizaje , una estación de emplazamiento y una estación de azimut ,definiendo la pista de aterrizaje un sistema de referencia cartesiano directo Rc que comprende, como ejes, un ejelongitudinal de la pista de aterrizaje , llamado primer eje (x), un eje transversal de la pista de aterrizaje quepasa por la estación de emplazamiento , llamado segundo eje (y) y un eje perpendicular…
PROCEDIMIENTO DE CONTROL FUNCIONAL DE UNA CENTRAL INERCIAL DE UN MÓVIL.
(14/12/2011) Procedimiento de control funcional de una central inercial de un móvil, embarcada en un simulador de movimiento y que facilita, en tiempo real, datos inerciales de medición (R) representativos de un movimiento aplicado por el citado simulador de movimiento , caracterizado porque comprende: una modelización teórica (M1) de la central inercial embarcada en el simulador de movimiento , siendo alimentada la citada modelización teórica en tiempo real por datos cinemáticos (D1) realmente ejecutados por el simulador de movimiento , y que facilita en tiempo real datos inerciales teóricos (T1) representativos de los citados datos inerciales de medición (R) que se supone son medidos por la central inercial embarcada en el simulador de movimiento una modelización de simulación (M2) que comprende…
ARQUITECTURA DE POSICIONAMIENTO DINÁMICO.
(28/06/2011) Una arquitectura que comprende: un sistema de navegación inercial ; y un sistema de posicionamiento dinámico para un buque que incorpora un medio para la combinación de unos datos suministrados por al menos uno de una pluralidad de equipamientos de medición de la posición y de unos datos suministrados por el sistema de navegación inercial para deducir una estimación de la posición o de la velocidad del buque; un conjunto de conmutadores ; y un controlador del conjunto de conmutadores; en la que el conjunto de conmutadores puede ser accionado bajo el control del controlador del conjunto de conmutadores para suministrar los datos suministrados por al menos…
PROCEDIMIENTO DE VERIFICACIÓN DE UNA UNIDAD DE MEDIDA INERCIAL DE VEHÍCULOS, ESPECIALMENTE DE VEHÍCULOS AÉREOS, EN ESTADO ESTACIONARIO.
(01/06/2011) Procedimiento de verificación de una unidad de medida inercial de vehículos, especialmente de vehículos aéreos, en estado estacionario, - en donde la unidad inercial presenta · al menos un sensor de aceleración que suministra una señal de aceleración en traslación, y · al menos un sensor de velocidad de giro que suministra una señal de velocidad de giro, - en donde la unidad de medida inercial está unida con una disposición de ordenador de navegación dotada de al menos un ordenador, · que presenta un primer elemento funcional que recibe y procesa como datos de entrada las señales de aceleración en traslación suministradas por el sensor de aceleración y las señales…
SISTEMA DE MONITORIZACION DEL MOVIMIENTO DEL SER HUMANO.
(16/11/2007). Ver ilustración. Solicitante/s: CENTRO ESTUDIOS, INVESTIGACION-MEDICINA DEPORTE (CEIMD). INST NAVARRO DEPORTE-JUVENTUD. GOB NAVARRA. Inventor/es: IZQUIERDO REDIN,MIKEL, LLARRION ZUGASTI,JOSE LUIS, SANTAMARIA NAVARRO,JOSE ANTONIO.
Sistema de monitorización del movimiento del ser humano, formado por un módulo sensor que se dispone sobre la persona de aplicación, comprendiendo un conjunto funcional capaz de medir vectores de posición, velocidad y aceleración en componentes según los tres ejes del espacio, para transmitir la información a un equipo informático que controla el funcionamiento y gestiona la información traduciéndola en datos indicativos del estado físico de la persona analizada.
ESTIMACION DE LA POSICION EN UN CUERPO ORIENTABLE USANDO UNA REPRESENTACION DE DATOS MEDIANTE CUATERNION MODIFICADO.
(01/03/2007) Un método de estimación de la posición de un cuerpo orientable incluyendo dicho cuerpo medios detectores de orientación y medios de detección de velocidad angular comprendiendo el método las etapas de: producir información de velocidad angular a partir de dicho medio detector de velocidad angular , y producir información de orientación a partir de dicho medio detector de orientación , caracterizado porque la transformación e integración de dicha información de velocidad angular producida para producir la primera información de posición del cuaternión de manera que dicha primera información del cuaternión está obligada a representar una rotación alrededor de un eje horizontal en el marco de tierra de referencia; procesar dicha información…
SISTEMA Y METODO DE FUSION DE SENSORES PARA ESTIMAR POSICION, VELOCIDAD Y ORIENTACION DE UN VEHICULO, ESPECIALMENTE UNA AERONAVE.
(16/11/2006) Sistema y método de fusión de sensores para estimar posición, velocidad y orientación de un vehículo, especialmente una aeronave. Sistema para estimar posición, velocidad y orientación de un vehículo , que comprende medios para determinar las componentes, según ejes cuerpo del vehículo, de dos vectores unitarios constantes no colineales; medios para determinar las componentes, según ejes tierra, de dichos vectores unitarios constantes no colineales; medios para determinar las tres componentes de velocidad angular del vehículo en ejes cuerpo; medios para corregir dicha velocidad angular con una corrección y obtener una velocidad…
APARATO DE NAVEGACION SOBRE EL TERRENO.
(16/03/2004) Un aparato de navegación sobre el terreno para un vehículo estacionario o móvil cuando el aparato está montado en el mismo, que incluye un sistema para determinar la posición, la velocidad, la altitud y la orientación del vehículo, capaz de funcionar para proporcionar señales indicativas de una primera altura medida , una primera velocidad y una primera posición del vehículo, unos medios de exploración operables para explorar el terreno alrededor del vehículo y medir una distancia desde el vehículo al mismo, unos primeros medios de combinación para combinar las señales indicativas de la primera altura medida , de la distancia y de la primera posición del vehículo 2, junto con estimaciones de error asociadas con las mismas, y para dar como salidas los resultados de dicho procedimiento de combinación, unos medios de estimación…
PROCEDIMIENTO PARA LA ALINEACION DE TRANSFERENCIA DE UNA UNIDAD DE MEDICION INERCIAL EN PRESENCIA DE RETARDOS DESCONOCIDOS EN LAS MEDICIONES DE UNA AERONAVE.
(01/12/2003) Procedimiento para la alineación de transferencia de correspondencia de velocidades entre un vehículo transportador y un vehículo transportado, que comprende: a) medir repetidamente una diferencia de velocidad entre el vehículo transportador y el vehículo transportado; b) a continuación de cada una de dichas mediciones, actualización de un vector de estado que incluye un valor predicho de dicha diferencia de velocidad; c) entre dichas mediciones, extender dicho vector de estado adelante en el tiempo; y d) desplazar el vehículo transportador y el vehículo transportado a lo largo de una trayectoria que incluye un primer segmento, un segundo segmento y un tercer segmento, siendo efectuado dicho desplazamiento…
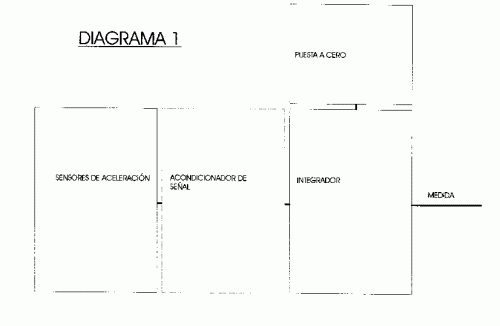
DISPOSITIVO AUTONOMO LIBRE INDICADOR DE POSICION TRIDIMENSIONAL.
(01/11/2003). Ver ilustración. Solicitante/s: PAVLOVA BOJILOVA,ELENA. Inventor/es: PAVLOVA BOJILOVA,ELENA.
Dispositivo autónomo libre indicador de posición tridimensional. Consiste en un dispositivo móvil que es capaz de determinar su posición a lo largo de uno o más ejes respecto a un origen de coordenadas fijado previamente por el usuario. La novedad radica en la autonomía del dispositivo, que para su funcionamiento no requiere ninguna clase de entorno o elementos de apoyo externos tales como emisores de ondas, superficies reflectantes, etc. Consta de un bloque de uno o más sensores de aceleración, conectados opcionalmente a una etapa acondicionadora de señal y posteriormente a un bloque integrador de señal. La señal integrada dos veces -representando el espacio recorrido- se suministra como resultado de la medición. Los integradores pueden ser puestos a cero mediante un conmutador, que es el que sirve para fijar el origen de coordenadas.
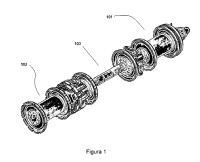
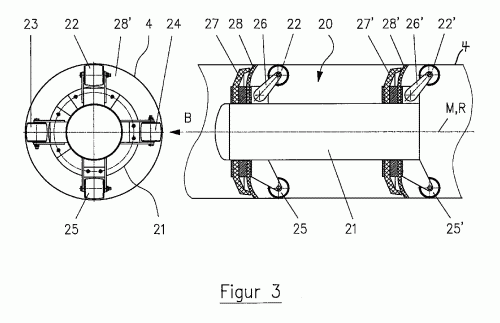
DIABLO PARA DETERMINAR LA POSICION DE TUBERIAS.
(16/02/2003). Ver ilustración. Solicitante/s: PIPETRONIX GMBH. Inventor/es: GOEDECKE, HARTMUT.
LA INVENCION SE REFIERE A UN RASCADOR CON EL QUE DETERMINAR LA POSICION DE TUBERIAS . EL RASCADOR POSEE AL MENOS UN CUERPO Y VARIOS ELEMENTOS DE SOPORTE (12, 12', 13, 14, 14', 22, 22', 23, 24, 25, 25', 26, 26') DISPUESTOS EN TORNO A SU PERIMETRO EXTERIOR, PARA GUIAR EL RASCADOR POR EL INTERIOR DE LA TUBERIA . EL CUERPO ALOJA UNA PLATAFORMA GIROSCOPICA Y VARIOS DISPOSITIVOS PARA LA OBTENCION Y EL PROCESAMIENTO DE LOS RESULTADOS DE MEDICION. GRACIAS A LA COMBINACION DE VARIOS ELEMENTOS DE SOPORTE (12, 12', 13, 14, 14', 22, 22', 23, 24, 25, 25', 26, 26'), EL CUERPO DEL RASCADOR AVANZA EN UN ANGULO CONSTANTE DEFINIDO EN RELACION CON EL EJE DE LA TUBERIA (R). ALGUNOS DE DICHOS ELEMENTOS (13, 14, 14', 24, 25, 25') SON RIGIDOS EN SENTIDO RADIAL, MIENTRAS QUE OTROS (12, 12', 22, 22', 23, 26, 26') POSEEN CIERTA FLEXIBILIDAD EN ESTE MISMO SENTIDO.
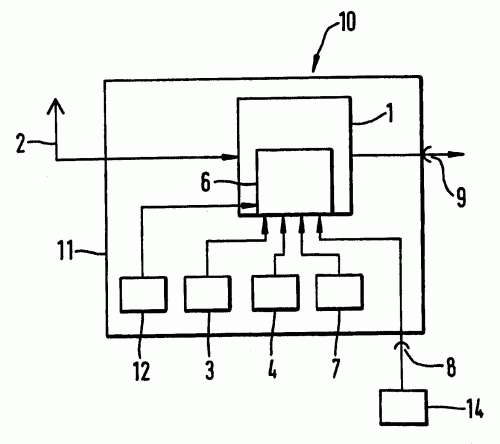
SENSOR DE LOCALIZACION CON UN RECEPTOR DE SATELITES PARA LA DETERMINACION DE LA POSICION.
(01/11/2002). Ver ilustración. Solicitante/s: ROBERT BOSCH GMBH. Inventor/es: BODE, FRIEDRICH-WILHELM, TANNEBERGER, VOLKMAR.
LA PRESENTE INVENCION SE REFIERE A UN DETECTOR QUE INCLUYE EN SU ALOJAMIENTO UN DETECTOR DE SEÑALES DE SATELITE , UN SENSOR DE R.P.M. , COMO SENSOR DE DIRECCION, Y UN ACELEROMETRO COMO INDICACION DE LA DISTANCIA CUBIERTA. LAS SEÑALES TRANSMITIDAS POR LOS SENSORES SE ENVIAN A UN FILTRO COMUN , PERMITIENDO DE ESE MODO QUE SE OBTENGAN DATOS DE LA SALIDA DEL DETECTOR DE POSICION EN RELACION CON EL LUGAR, VELOCIDAD DE DESPLAZAMIENTO Y/O DIRECCION DEL DESPLAZAMIENTO. DEBIDO A LA DISPOSICION COMPACTA DE LOS SENSORES, LOS DIVERSOS COMPONENTES, INCLUIDOS LOS FILTROS, PUEDEN UTILIZARSE REPETIDAS VECES.
CENTRAL INERCIAL TRIAXIAL CON VARIOS TIPOS DE GIROMETROS.
(16/03/2002). Ver ilustración. Solicitante/s: SAGEM S.A.. Inventor/es: MAZZANTI, FREDERIC, GUEDON, JEAN-YVES, BECHERET, YVES.
LA CENTRAL INERCIAL ESTA DESTINADA A UN VEHICULO CON UNA DINAMICA DE MOVIMIENTO ANGULAR REDUCIDA EN TORNO DE UN PRIMER EJE ENTRE LOS TRES EJES DE BALANCEO, CABECEO Y GUIÑADA Y CONSTA DE TRES GIROMETROS. DOS DE LOS GIROMETROS ESTAN COLOCADOS UNO SIGUIENDO UN SEGUNDO EJE DE LOS TRES CITADOS (YGY) Y EL OTRO A LO LARGO DE UNA DIRECCION (XGY) INTERMEDIA ENTRE EL PRIMER EJE Y EL TERCERO. EL TERCER GIROMETRO TIENE UNA PRECISION INFERIOR EN VARIOS ORDENES DE MAGNITUD Y UN COSTE MUY INFERIOR AL DE LOS OTROS DOS Y ESTA COLOCADO EN EL PLANO DEFINIDO POR LOS EJES PRIMERO Y TERCERO (X, Z).
CALIBRACION AUTOMATICA DE PERCEPTORES REDUNDANTES.
(16/05/2000). Solicitante/s: HONEYWELL INC.. Inventor/es: KEYES, CHARLES, L., WEED, DOUGLAS, M.
UN SISTEMA PARA CALIBRAR LOS SENSORES DE UN SISTEMA SENSOR REDUNDANTE CALCULANDO PRIMERO UN CONJUNTO DE SEÑALES DE ERROR BASADAS EN DIFERENCIAS ENTRE UNA COMBINACION DE LAS SALIDAS Y VALORES CONOCIDOS Y CALCULANDO UN SEGUNDO CONJUNTO DE SEÑALES DE ERROR BASADAS EN DIFERENCIAS ENTRE LA PARIDAD ENTRE SENSORES PRESELECCIONADOS Y UN VALOR PREDETERMINADO Y CALCULANDO, A PARTIR DEL PRIMER Y SEGUNDO CONJUNTO DE SEÑALES DE ERROR, UNA PLURALIDAD DE SEÑALES DE CALIBRACION PARA AÑADIR A LA SALIDA DE LOS SENSORES INDIVIDUALES QUE ESTAN EN ERROR PARA CORREGIR SUS SALIDAS.
PROCEDIMIENTO Y DISPOSITIVO PARA ESTIMAR LOS SESGOS GIROMETRICOS.
(16/10/1999). Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE. Inventor/es: NACCACHE, FREDERIC.
LA PRESENTE INVENCION SE REFIERE A UN PROCEDIMIENTO Y A UN DISPOSITIVO PARA ESTIMAR LOS SESGOS GITOMETRICOS DE MEDICIONES EFECTUADAS POR GIROMETROS MONTADOS SOBRE UNA AERONAVE (A). SEGUN LA INVENCION: . SE INMOVILIZA DICHO AERONAVE (A) EN UN LUGAR DETERMINADO SOBRE LA TIERRA, DE LA CUAL SE MIDE LA LATITUD; . SE DETERMINAN LOS ANGULOS DE ASIENTO ({ZT}), DE ROLLIDO ({PH}) Y EL RUMBO DE DICHO AERONAVE (A); . SE CALCULA, A PARTIR DE LA LATITUD Y DE LOS ANGULOS DE ASIENTO ({ZT}), DE ROLLIDO ({PH}) Y DE RUMBO, LA VELOCIDAD DE ROTACION DE LA TIERRA; . SE MIDE LA VELOCIDAD DE ROTACION DE LA TIERRA; Y . SE EFECTUA LA SUSTRACCION ENTRE LAS VELOCIDADES CALCULADAS Y MEDIDAS, PARA OBTENER DICHOS SESGOS GIROMETRICOS.
INTEGRANTES DE UN SISTEMA DE REFERENCIA REDONDANTE PARA LA REGULACION DE VUELO Y LA GENERACION DE INFORMACION SOBRE RUMBO Y SITUACION.
(16/07/1992). Solicitante/s: BODENSEEWERK GERATETECHNIK GMBH. Inventor/es: KROGMANN, UWE, BESSEL, JURGEN.
UNA VARIEDAD DE GIROSCOPOS INVERSORES DE DOS EJES ESTAN DISPUESTOS ESTACIONARIAMENTE EL AVION, YA QUE SUMINISTRAN REDONDAMENTE INFORMACIONES SOBRE VELOCIDADES ANGULARES. UNA VARIEDAD DE INDICADORES DE ACELERACION SUMINISTRAN REDONDANTEMENTE INFORMACIONES DE ACELERACION. PRIMEROS ELEMENTOS DE ELABORACION DE SEÑALES CONTIENEN ELEMENTOS PARA EL RECONOCIMIENTO DE DEFECTOS Y DESCONEXION AUTOMATICA Y ELEMENTOS PARA ELIMINAR INFORMACIONES DE VELOCIDADES ANGULARES Y DE ACELERACION DEFECTUOSAS. LAS INFORMACIONES DE VELOCIDADES ANGULARES Y ACELERACIONES LIBRES DE ERRORES SUMINISTRAN SEÑALES ESTABLES PARA REGULAR EL AVION. SEGUNDOS ELEMENTOS DE ELABORACION DE SEÑALES CONTIENEN INFORMACIONES DE VELOCIDADES ANGULARES Y DE ACELERACIONES LIBRES DE DEFECTOS E INTEGRADAS Y SUMINISTRAN SEÑALES DE REFERENCIA SOBRE EL VUELO Y LA SITUACION DEL AVION.
UN APARATO DE NAVEGACION PARA LA PRESENTACION PREDICTIVA DE LAS CARACTERISTICAS DE NAVEGACION DE BARCOS.
(01/02/1977). Solicitante/s: SPERRY RAND CORPORATION.
Resumen no disponible.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}