Método y aparato para determinar la posición de un objeto bajo el agua en tiempo real.
Un método para determinar una posición subacuática en tiempo real de un objeto,
comprendiendo dicho métodolas etapas de:
tomar una muestra de una primera señal (X, Y, Z) correspondiente a dicha posición de dicho objeto a unaprimera frecuencia dada, con un error de posición medio igual a cero;
tomar una muestra de una segunda señal correspondiente a, al menos una de, velocidad (Vx, Vy, Vz) y unaaceleración (Ax, Ay, Az) de dicho objeto a una segunda frecuencia más alta que dicha primera frecuencia,dando lugar a un cálculo de posición con un error medio que no es igual a cero;
combinar dicha primera señal con dicha segunda señal para proporcionar dicha posición a dicha segundafrecuencia dada tendiendo en cuenta el suministro de datos asíncronos y compensación de los retrasos en lasmedidas.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/CA2004/001734.
Solicitante: HYDRO-QUEBEC.
Nacionalidad solicitante: Canadá.
Dirección: Technologie et Développement Ind., Direction Valorisation, 1000, rue Sherbrooke Est, 16e étage Montréal, Québec H3A 3G4 CANADA.
Inventor/es: BLAIN,MICHEL, HOUDE,RÉGIS, LALIBERTÉ,RICHARD.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G01C21/16 G01C […] › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
PDF original: ES-2422184_T3.pdf
Fragmento de la descripción:
Método y aparato para determinar la posición de un objeto bajo el agua en tiempo real
REFERENCIA CON SOLICITUDES RELACIONADAS Este es el primer campo de aplicación para la presente invención.
CAMPO TÉCNICO Esta invención se refiere al campo de los robots. Más concretamente, esta invención pertenece al campo de la determinación en tiempo real de la posición de un vehículo subacuatico operado por control remoto.
ANTECEDENTES DE LA INVENCIÓN Como parte del programa de seguridad de presas de agua, ha sido desarrollado un vehículo subacuatico accionado remotamente (ROV) durante los pasados años. Tal vehículo accionado remotamente se puede utilizar en distintas tareas de inspección que tiene lugar en ambientes subacuáticos. El vehículo preferiblemente es utilizado para la inspección de superficies de presas, de interfaz roca hormigón, de equipos subacuáticos relacionados con la reducción de turbinas y para localizar defectos de importante tamaño.
Algunos expertos en la técnica apreciarán que a lo largo de los años, el deterioro del hormigón de la presa y otros elementos sumergidos necesita ser reparado. La inspección se realiza por tanto para preparar los trabajos de rehabilitación. La obstrucción de la toma de agua también es inspeccionada antes del proceso de limpiado.
Cuando el vehículo operado remotamente inspecciona la presa, las fisuras o defectos sobre la superficie son identificados utilizando por ejemplo una cámara a bordo, localizada de forma precisa y el vehículo operado remotamente es reproducido en un ambiente virtual. El ambiente virtual consiste en un modelo gráfico completo a escala (como está expuesto por ejemplo en Côté, J., Lavallée, J.”Augmented Reality Graphic, Interface for Upstream Dam Inspection”, SPIE, Telemanipulator and Telepresence Technologies II, Filadelfia, Octubre de 1995) y el modelo gráfico y dinámico del submarino. Más tarde, las tripulaciones de mantenimiento volverán a los defectos identificados para seguir su evolución en el tiempo o para realizar la restauración. Para realizar tales tareas de forma eficiente, el vehículo operado remotamente debe estar equipado con un sistema de navegación preciso, que proporcione su posición exacta con relación a la presa en tiempo real. El estado de los sistemas de navegación de la técnica no proporciona navegación en tiempo real para los vehículos subacuáticos debido a que la velocidad de muestreo para la posición de medida y la precisión del sistema normalmente no son demasiado elevadas.
En una realización en donde la viabilidad en el agua es muy baja o cuando la estructura de la presa es muy compleja, es necesario un sistema de navegación que proporcione la posición en tiempo real para localizar el vehículo operado remotamente.
Por ejemplo en “pos/sv-an aided inertial navigation system for submersible vehicles”, Steeven Woolden, expone un sistema de navegación ayudado por la inercia que realiza un filtro de Kalman estrechamente vinculado para mezclar con los mejores datos de inercia de precisión posibles a partir de un subsistema de inercia de peso ligero y añadir los datos obtenidos a partir de una variedad de sensores. Sin embargo, pueden ocurrir disfunciones del sistema de tiempo real, debido a que los sensores que enviaron los datos a una velocidad no fija, debido a errores del sistema por ejemplo, y la adquisición de datos puede ser intermitente. En este caso, el cálculo de la posición del vehículo sumergible no es realmente preciso.
Existe por tanto la necesidad de un método y aparato que supere las desventajas identificadas anteriormente.
SUMARIO DE LA INVENCIÓN Es un objetivo de la invención proporcionar un método para proporcionar una posición en tiempo real de un vehículo operado remotamente que funciona bajo el agua.
Otro objetivo de la invención es proporcionar un aparato para posicionar en tiempo real un vehículo operado remotamente que funciona bajo el agua.
De acuerdo con un aspecto de la invención, se proporciona un método para determinar una posición subacuática en tiempo real de un objeto de acuerdo con la reivindicación 1.
De acuerdo con otro aspecto de la invención, se proporciona un aparato para determinar una posición en tiempo real de un objeto subacuático de acuerdo con la reivindicación 9.
BREVE DESCRIPCIÓN DE LOS DIBUJOS Características y ventajas de la presente invención se harán evidentes de la siguiente descripción detallada, tomada en combinación con los dibujos adjuntos, en los que:
la Figura 1 es un diagrama de bloques que muestra un sistema de visualización de acuerdo con una realización preferida de la invención; la Figura 2 es un gráfico que muestra la compensación de filtro de Kalman para la deriva de posición de la unidad de sensor de velocidad de Doppler 14; la Figura 3 es un gráfico que muestra el impacto, en el cálculo de posición, del retraso de posición acústico y los fallos de la unidad de sensor de velocidad de Dopper; la Figura 4 es un gráfico que muestra el cálculo de posición corregida para el retraso de posición acústico y los fallos de la unidad de sensor de velocidad Doppler 14; la Figura 5 es un gráfico que muestra el efecto de los errores de calibración en la posición del sistema de unidad de sensor de velocidad de Doppler 14; la Figura 6 es un gráfico que muestra los resultados experimentales del impacto de los fallos de la unidad de sensor de velocidad Doppler 14 en los cálculos de posición; la Figura 7 es un gráfico que muestra los resultados experimentales de la cálculo de posición Z durante los fallos de la unidad de sensor de velocidad Doppler 14; y la Figura 8 es un diagrama de bloques que muestra una realización en la que el sistema de navegación es utilizado de manera ventajosa.
Se observará que en los dibujos, las características iguales están identificadas con números de referencia iguales.
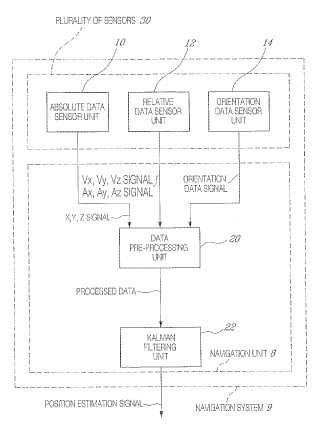
DESCRIPCIÓN DETALLADA DE LA REALIZACIÓN PREFERIDA Haciendo ahora referencia a la Figura 1 se muestra un diagrama de bloques que muestra un sistema de navegación 9 de acuerdo con una realización preferida de la invención.
Un sistema de navegación comprende una unidad de pre-procesamiento de datos 20 y una unidad de filtrado de Kalman 22.
Se preciará que en el caso en el que se detecte un fallo/mal funcionamiento de un sensor dado, los datos proporcionados por ese sensor son descartados.
La unidad de pre-procesamiento de datos 20 recibe una señal X, Y, Z procedente de una unidad de sensor de datos absoluta 10, una señal de velocidad (Vx, Vy, Vz) y una señal de aceleración Ax, Ay y Az proporcionada por la unidad de sensor de datos relativa 12 y una señal de datos de orientación proporcionada por una unidad de sensor de datos de orientación 14.
La unidad de sensor de datos absoluta 10 proporciona una señal de datos de posición absoluta a una primera frecuencia de muestreo con un error de posición medio igual a cero. Se apreciará que en una realización de la invención, la unidad de sensor de datos absoluta 10 puede estar referenciada como una unidad de sensor de posición.
La unidad de sensor de datos relativa 12 promociona una señal de datos relativa a una segunda frecuencia de muestreo. Se apreciará que en una realización de la invención, la unidad de sensor de datos relativa 12 puede estar referida como una unidad de sensor de velocidad instantánea. En efecto, tal unidad de sensor de datos relativa 12 proporciona una velocidad instantánea, que da lugar a un cálculo de posición con un error medio que no es igual a cero.
Se apreciará que la segunda frecuencia de muestreo es sustancialmente más alta que la primera frecuencia de muestreo.
Se apreciará que la unidad de sensor de datos absoluta 10 comprende al menos uno de un batímetro que proporciona una señal Z y un sensor acústico que proporciona una señal X e Y.
Se apreciará además que la unidad de sensor de datos relativa 12 comprende al menos uno de un sensor Doppler que proporciona una señal Vx, Vy y Vz y un acelerómetro que proporciona una señal Ax, Ay y Az.
Se apreciará que la unidad de sensor de datos de orientación 14 comprende al menos una de sensores giroscópicos que proporcionan una señal ΩX, ΩY, y ΩZ, un inclinómetro que proporciona una señal ΩX, y ΩY, y una brújula que proporciona una señal ΩZ.
La unidad de pre-procesamiento de datos 20 pre-procesa los datos recibidos y proporciona los datos procesado a la unidad de filtrado Kalman 22.
Como se explica más adelante, la unidad de filtrado Kalman 22 proporciona una señal de cálculo de posición.
En la realización preferida de... [Seguir leyendo]
Reivindicaciones:
1. Un método para determinar una posición subacuática en tiempo real de un objeto, comprendiendo dicho método las etapas de:
tomar una muestra de una primera señal (X, Y, Z) correspondiente a dicha posición de dicho objeto a una primera frecuencia dada, con un error de posición medio igual a cero; tomar una muestra de una segunda señal correspondiente a, al menos una de, velocidad (Vx, Vy, Vz) y una aceleración (Ax, Ay, Az) de dicho objeto a una segunda frecuencia más alta que dicha primera frecuencia, dando lugar a un cálculo de posición con un error medio que no es igual a cero; combinar dicha primera señal con dicha segunda señal para proporcionar dicha posición a dicha segunda frecuencia dada tendiendo en cuenta el suministro de datos asíncronos y compensación de los retrasos en las medidas.
2. El método como el reivindicado en la reivindicación 1, en el que dicha combinación comprende tener en cuenta los fallos de sensor cuando se toma una muestra de la primera señal y de la segunda señal.
3. El método como el reivindicado en la reivindicación 1, en el que dicha combinación comprende asociar un primer peso a dicha primera señal y un segundo peso a dicha segunda señal.
4. El método como el reivindicado en la reivindicación 3, en el que la asociación de dicho primer peso a dicha primera señal y dicho segundo peso a dicha segunda señal comprende la utilización de filtrado Kalman.
5. El método como el reivindicado en una cualquiera de las reivindicaciones 1 a 4, en el que dicha primera señal es proporcionada utilizando una unidad de sensor de posición acústica.
6. El método como el reivindicado en la reivindicación 5, en el que dicha unidad de sensor de posición acústica proporciona una señal de posición X, Y, y en el que además una unidad de sensor de Batímetro proporciona una señal de posición Z.
7. El método como el reivindicado en una cualquiera de las reivindicaciones 1 a 6, en el que además dicha segunda señal corresponde a dicha velocidad, en el que además dicho muestreo de dicha segunda señal comprende utilizar una unidad de sensor de velocidad Doppler.
8. El método como el reivindicado en una cualquiera de las reivindicaciones 1 a 6, en el que dicha segunda señal corresponde a dicha aceleración, y en el que además dicho muestreo de dicha segunda señal comprende utilizar una unidad de sensor de giróscopo y acelerómetro.
9. Un aparato (9) para determinar una posición en tiempo real de un objeto subacuático, comprendiendo dicho aparato
una unidad de sensor de posición (10) que tiene un error medio igual a cero para proporcionar una señal de posición (X, Y, Z) de dicho objeto a una primera frecuencia dada; al menos una de una unidad de sensor de velocidad instantánea y una unidad de sensor de aceleración (12) para proporcionar al menos una de una señal de velocidad instantánea correspondiente (Vx, Vy, Vz) y una señal de aceleración instantánea correspondiente (Ax, Ay, Az) a una segunda frecuencia dada mayor que dicha primera frecuencia dada; y una unidad de proporcionamiento de posición 8 que recibe y combina dicha señal de posición y dicha al menos una señal de velocidad instantánea correspondiente y dicha señal de aceleración instantánea correspondiente para proporcionar dicha señal de posición en tiempo real a dicha segunda frecuencia dada teniendo en cuenta el suministro de datos asíncronos y la compensación de los retrasaos en las medidas.
10. El aparato como el reivindicado en la reivindicación 9, en el que dicha unidad de proporcionamiento de posición comprende una unidad de filtrado Kalman 22 que recibe dicha señal de posición y dicha al menos una señal de velocidad instantánea y dicha señal de aceleración instantánea para proporcionar dicha señal de posición de dicho objeto en tiempo real.
11. El aparato como el reivindicado en una cualquiera de las reivindicaciones 9 a 10, en el que dicha unidad de sensor de posición comprende una unidad de sensor de posición acústica.
12. El aparato como el reivindicado en la reivindicación 10, en el que dicha unidad de sensor de posición acústica proporciona una señal de posición X, Y, en el que además dicho aparato comprende una unidad de sensor de Batímetro para proporcionar una señal de posición Z.
13. El aparato como el reivindicado en una cualquiera de las reivindicaciones 9 a 12, en el que dicha unidad de sensor de velocidad comprende una unidad de sensor de velocidad Doppler.
14. El aparato como el reivindicado en una cualquiera de las reivindicaciones 9 a 12, en el que dicha unidad de 5 sensor de velocidad instantánea comprende una unidad de sensor de giróscopo y acelerómetro.
15. El aparato como el reivindicado en una cualquiera de las reivindicaciones 9 a 14, en el que la unidad de proporcionamiento de posición también tiene en cuenta fallos de sensor cuando se combina dicha señal de posición y dicha al menos una de dicha señal de velocidad instantánea correspondiente y dicha señal de aceleración instantánea correspondiente.
16. Un objeto operado remotamente que comprende un aparato para determinar una posición en tiempo real, como se ha reivindicado en una cualquiera de las reivindicaciones 9 a 15.
Patentes similares o relacionadas:
Generación de estimación de la gravedad de la Tierra, del 3 de Junio de 2020, de Helsingin Yliopisto: Un procedimiento para generar estimaciones de la gravedad de la Tierra para períodos de tiempo secuenciales, en el que el procedimiento, llevado a cabo por un aparato , […]
Procedimiento y dispositivo para determinar parámetros de medición inerciales, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al […]
Método y sistema de navegación inercial asistido por GPS, del 18 de Marzo de 2020, de IMI Systems Ltd: Un método de navegación inercial asistido por GPS que comprende: proporcionar múltiples sensores que incluyen múltiples unidades de medición de inercia (IMU) y al menos […]
Dispositivo y procedimiento de mantenimiento de actitud de un portador que utiliza girómetros, del 18 de Marzo de 2020, de Safran Electronics & Defense: Dispositivo de mantenimiento de actitud de un portador, comprendiendo el dispositivo: · tres girómetros primarios dispuestos […]
 Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Localización dentro de un entorno usando fusión de sensores, del 4 de Diciembre de 2019, de THE BOEING COMPANY: Un aparato que comprende: una pluralidad de sistemas de datos configurados para generar una pluralidad de flujos de datos en la cual la pluralidad de flujos […]
Procedimiento de gestión automática de un girómetro longitudinal montado en un aparato volador, del 20 de Noviembre de 2019, de MBDA FRANCE: Procedimiento de gestión automática de un girómetro longitudinal que está montado sobre un misil aéreo, susceptible de ser puesto en rotación, procedimiento […]
Ayudas de navegación para sistemas aéreos no tripulados en un entorno sin GPS, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Método para estimar una posición o trayectoria de una aeronave en un entorno sin GPS que comprende: obtener, mediante un sistema de navegación inercial, una […]