Dispositivo de seguimiento inercial, calzado y equipamiento de la persona dotada de un dispositivo de este tipo.
Dispositivo inercial de navegación (10) destinado a equipar un objeto (1) en apoyo de forma intermitente con unasuperficie,
comportando, el dispositivo, una central inercial (11) que tiene por lo menos un sensor inercial, y mediosde conexión mecánica entre la central inercial al objeto (12), caracterizado por el hecho de que, los medios deconexión (12) están preparados para asegurar, entre la central inercial (11) y el objeto (11), un acoplamientomecánico cuando el objeto (1) no está apoyándose contra la superficie, y un desacoplamiento mecánico, cuando elobjeto (1) está apoyándose contra la superficie, de tal forma que, la central inercial (11) sea sensiblemente inmóvilcon respecto a la superficie, cuando el objeto está apoyándose contra la superficie.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/056743.
Solicitante: COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES.
Nacionalidad solicitante: Francia.
Dirección: BATIMENT "LE PONANT D" 25, RUE LEBLANC 75015 PARIS FRANCIA.
Inventor/es: LAMY-PERBAL,SYLVIE, PETRES,CLÉMENT, RIWAN,ALAIN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/16 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
PDF original: ES-2413084_T3.pdf
Fragmento de la descripción:
Dispositivo de seguimiento inercial, calzado y equipamiento de la persona dotada de un dispositivo de este tipo.
La presente invención se refiere a un dispositivo de seguimiento inercial. La invención se refiere más particularmente a la navegación de personas, ignorando la topografía de los lugares en los que se encuentran éstas y que no pueden o no desean utilizar la vista como órgano principal de localización. Las personas que tienen discapacidad visual también pueden utilizar la invención. La invención también concierne a un calzado y a un equipamiento de la persona dotada de un dispositivo de este tipo.
En el ámbito de la ayuda para la navegación de personas, se conoce el uso de sistemas de navegación por satélite de tipo GPS (del inglés “Global Positioning System” para sistema de posicionamiento global) o “GALILEO”. Estos sistemas requieren que el usuario lleve un receptor de señales de satélite el cual incorpora una unidad de cálculo adaptada para calcular la posición del receptor a partir de las señales de satélite. Asociadas a un software informático cartográfico, estos sistemas son particularmente eficaces. Sin embargo, en ciertos entornos, no es posible captar las señales de satélite y, especialmente, en el interior de ciertos edificios y, por ejemplo, en el metro.
Los sistemas de navegación dedicados a la navegación en el interior de los edificios necesitan que éstos estén preequipados para permitir un seguimiento mediante triangulación, de un dispositivo portado por el usuario. Este hecho requiere que el usuario limite sus desplazamientos a lugares que estén equipados. Además, las inversiones que se prevén, disuaden generalmente a los organismos encargados de la administración de estos edificios, de instalar tales sistemas.
En general, la navegación de los usuarios en los edificios únicamente se asiste mediante una señalización de guía y de seguimiento o localización. Este tipo de asistencia a la navegación, está prohibida a las personas con discapacidad visual y necesita condiciones de luminosidad que no siempre están adaptadas a las circunstancias (una avería eléctrica o apagón, por ejemplo) .
En consecuencia, se ha propuesto un sistema de navegación a través de un sistema inercial que comprende una central inercial que contiene giroscopios y acelerómetros, y medios de conexión mecánica de la central inercial, al usuario. Conociendo el punto de partida del usuario, como la entrada de un edificio, es posible determinar la trayectoria del usuario en el edificio integrando las señales de aceleración y de velocidad de rotación transmitidos por la central inercial. Los resultados de estos sistemas de navegación han sido esperanzadores a pesar de una imprecisión relativamente grande, haciendo difícil la navegación dentro de los edificios que tienen una red de vías de circulación de densidad importante.
Una mayor parte de esta imprecisión es consecuencia de la desviación permanente de los sensores, en particular, cuando éstos son sensores de gama baja a bajo coste. Para evitar los efectos de esta desviación del cálculo de la trayectoria, se ha intentado fijar la central inercial sobre el pie del usuario con el fin de parar la integración de las señales cuando el pie está en el suelo. Este hecho permite, entre otras cosas, restablecer ciertos parámetros de funcionamiento cuando el pie se encuentra en el suelo, como el restablecimiento del registro de la central inercial en el registro terrestre. Así, de este modo, la precisión del sistema se ha mejorado de forma significativa. La patente US 2009/007 1805 describe un sistema de este tipo, en el cual, un sensor colocado en la suela del zapato detecta la parte estacionaria del paso del usuario (apoyo) .
Un objetivo de la invención es el de proponer un medio para mejorar aún más la precisión de estos sistemas, limitando las interferencias externas al sensor. Se ha observado que, el pie, nunca se encuentra completamente inmóvil en las fases de apoyo:
cuando el pie se apoya sobre el suelo, éste puede encontrarse animado de pequeños movimientos, imperceptibles a simple vista, para algunos, que se transmiten al zapato. Estos movimientos son necesarios para caminar y generalmente son incontrolables. Estos movimientos provocan un error el cual es necesario corregir y la corrección del software informático de un error de este tipo no es posible puesto que este error no es cuantificable ni predecible.
Para remediar este inconveniente, se prevé, según la invención, un dispositivo inercial de navegación, destinado a equipar un objeto que se apoya de forma intermitente sobre una superficie, teniendo, el dispositivo, una central inercial que tiene, por lo menos, un sensor inercial, y medios de conexión mecánica, de la central inercial al objeto. Los medios de conexión se disponen para asegurar, entre la central inercial y el objeto, un acoplamiento mecánico, cuando el objeto no está apoyado contra la superficie y un desacoplamiento mecánico, cuando el objeto está apoyado contra la superficie, de tal manera que, la central inercial sea sensiblemente inmóvil con respecto a la superficie, cuando el objeto está apoyado contra la superficie.
La superficie es, por ejemplo, el suelo. El objeto en cuestión, particularmente cuando lo sujeta o lo porta el usuario como, por ejemplo un zapato, puede moverse bajo la acción voluntaria o involuntaria del usuario cuando éste se encuentra en contacto con el suelo. La invención permite limitar la transmisión de estos movimientos a la central inercial durante las fases de apoyo contra el suelo garantizando, de este modo, la transmisión de los movimientos del objeto cuando el objeto en cuestión se está desplazando con respecto al suelo. Este hecho, permite tener inmóvil la central, durante el mayor tiempo posible durante las fases de apoyo del objeto contra el suelo.
Preferentemente, los medios de conexión, comprenden un soporte que define una cavidad (alojamiento) que recibe la central inercial, de deslizamiento vertical, y que tiene una superficie inferior destinada a extenderse, con respecto a la superficie, cuando el objeto se encuentra apoyado contra la superficie y, de un forma ventajosa, la superficie inferior constituye una superficie de apoyo del soporte contra la superficie.
El soporte puede asegurar una protección de la central inercial y facilita la fijación o la integración del dispositivo inercial al objeto.
Según dos formas de realización alternativas:
-La cavidad de recepción de la central inercial desemboca sobre la superficie inferior, para permitir el contacto de la central inercial con la superficie.
-La superficie inferior se corresponde con una placa rígida que cierra la cavidad de recepción de la central inercial, apoyándose la citada central inercial, en la placa rígida por lo menos cuando la placa rígida se encuentra en contacto con la superficie.
Así, de este modo, la central inercial se encuentra directamente en contacto con el suelo, o por mediación de una placa rígida, mientras que el soporte, retoma el esfuerzo de apoyo del dispositivo contra el suelo.
Según un modo de realización preferente, los medios de conexión, comprenden un cable flexible que une la central inercial al soporte y que tiene una longitud tal que, el cable, está tenso cuando el objeto se desprende de la superficie y suelto, cuando el objeto se está apoyando contra la superficie y, de una forma ventajosa, el cable se extiende en un conducto y tiene un extremo atado a la central inercial y en el lado opuesto, un extremo unido a un contrapeso de deslizamiento vertical, recibido en el soporte, entre una posición que sobresale de la superficie inferior del soporte para apoyarse sobre la superficie y una posición hundida.
El cable tiene una longitud adaptada para, a la vez, arrastrar la central inercial durante las fases de “vuelo” donde el objeto se desprende del suelo y maximizar la durada de inmovilización de la central inercial, durante las fases de apoyo del objeto contra el suelo.
Además, la invención tiene como objetivo un zapato, en el cual, el soporte forma una parte de la suela y un equipamiento de la persona, como un puntal, un andador o un bastón para caminar, equipado con un dispositivo de navegación de acuerdo con la invención.
Otras características y ventajas de la invención resaldrán mediante la lectura de la descripción, que sigue a continuación, de las formas particulares de realización, no limitativas de la invención.
Se hará referencia a los dibujos anexos, entre los cuales:
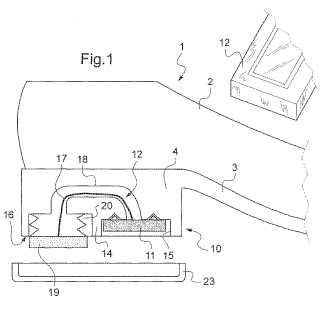
-la figura 1 es una vista esquemática, en sección longitudinal, de un zapato equipado con un dispositivo... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo inercial de navegación (10) destinado a equipar un objeto (1) en apoyo de forma intermitente con una superficie, comportando, el dispositivo, una central inercial (11) que tiene por lo menos un sensor inercial, y medios de conexión mecánica entre la central inercial al objeto (12) , caracterizado por el hecho de que, los medios de conexión (12) están preparados para asegurar, entre la central inercial (11) y el objeto (11) , un acoplamiento mecánico cuando el objeto (1) no está apoyándose contra la superficie, y un desacoplamiento mecánico, cuando el objeto (1) está apoyándose contra la superficie, de tal forma que, la central inercial (11) sea sensiblemente inmóvil
con respecto a la superficie, cuando el objeto está apoyándose contra la superficie.
2. Dispositivo según la reivindicación 1, en el cual, los medios de conexión (12) comprenden un soporte (14) que definen una cavidad (15) que recibe a la central inercial (11) de deslizamiento vertical y que tiene una superficie inferior (16) , destinada a extenderse, con respecto al suelo, cuando el objeto (1) está apoyándose contra la superficie.
3. Dispositivo según la reivindicación 2, en el cual, la superficie inferior (16) constituye una superficie de apoyo del soporte contra la superficie.
4. Dispositivo según la reivindicación 3, en el cual la cavidad (14) de recepción de la central inercial (11) desemboca en la superficie inferior (14) para permitir el contacto de la central inercial (11) con la superficie.
5. Dispositivo según la reivindicación 3, en el cual la superficie inferior (16) pertenece a una placa rígida (25) que cierra la cavidad destinada a recibir la central inercial (11) , apoyándose, la central inercial (11) , contra la placa rígida (25) , por lo menos cuando la placa rígida (25) , está en contacto con el suelo.
6. Dispositivo según cualquiera de las reivindicaciones 2 a 5, en el cual, los medios de conexión (12) , comprenden un cable flexible (17) que conecta la central inercial (11) al soporte (14) y que tiene una longitud tal que, el cable, se tensa cuando el objeto (1) se desengancha del suelo y el cable se destensa cuando el objeto (1) se apoya contra la superficie.
7. Dispositivo según la reivindicación 6, en el cual, el cable (17) se extiende en un conducto y comprende un extremo unido a la central inercial (11) y un extremo opuesto unido a un contrapeso (19) de deslizamiento vertical recepcionado en el soporte (14) , entre una posición que sobresale de la superficie inferior (16) del soporte, para apoyarse sobre la superficie, y una posición hundida.
8. Dispositivo según una cualquiera de las reivindicaciones 2 a 5, en el que, el soporte (14) , comporta una porción flexible (26) , dispuesta entre el soporte (14) y la central inercial (11) y preparada para limitar la transmisión de los movimientos del objeto (1) a la central inercial (11) , cuando el objeto (1) está apoyándose contra la superficie.
4.
9. Zapato que tiene una suela equipada con un dispositivo conforme a una cualquiera de las reivindicaciones 2 a 8, en el cual, el soporte (14) , forma una parte de la suela.
10. Equipamiento de la persona, estando el equipamiento provisto de un dispositivo conforme a una cualquiera de 45 las reivindicaciones 1 a 8.
Patentes similares o relacionadas:
Generación de estimación de la gravedad de la Tierra, del 3 de Junio de 2020, de Helsingin Yliopisto: Un procedimiento para generar estimaciones de la gravedad de la Tierra para períodos de tiempo secuenciales, en el que el procedimiento, llevado a cabo por un aparato , […]
Procedimiento y dispositivo para determinar parámetros de medición inerciales, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al […]
Método y sistema de navegación inercial asistido por GPS, del 18 de Marzo de 2020, de IMI Systems Ltd: Un método de navegación inercial asistido por GPS que comprende: proporcionar múltiples sensores que incluyen múltiples unidades de medición de inercia (IMU) y al menos […]
Dispositivo y procedimiento de mantenimiento de actitud de un portador que utiliza girómetros, del 18 de Marzo de 2020, de Safran Electronics & Defense: Dispositivo de mantenimiento de actitud de un portador, comprendiendo el dispositivo: · tres girómetros primarios dispuestos […]
 Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Localización dentro de un entorno usando fusión de sensores, del 4 de Diciembre de 2019, de THE BOEING COMPANY: Un aparato que comprende: una pluralidad de sistemas de datos configurados para generar una pluralidad de flujos de datos en la cual la pluralidad de flujos […]
Procedimiento de gestión automática de un girómetro longitudinal montado en un aparato volador, del 20 de Noviembre de 2019, de MBDA FRANCE: Procedimiento de gestión automática de un girómetro longitudinal que está montado sobre un misil aéreo, susceptible de ser puesto en rotación, procedimiento […]
Ayudas de navegación para sistemas aéreos no tripulados en un entorno sin GPS, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Método para estimar una posición o trayectoria de una aeronave en un entorno sin GPS que comprende: obtener, mediante un sistema de navegación inercial, una […]