CIP-2021 : A47L 11/24 : Máquinas para barrer el suelo accionadas por motor.
CIP-2021 › A › A47 › A47L › A47L 11/00 › A47L 11/24[1] › Máquinas para barrer el suelo accionadas por motor.
Notas[g] desde A47L 11/00 hasta A47L 13/00: Limpieza de suelos, alfombras, mobiliario, paredes o sus revestimientos
A NECESIDADES CORRIENTES DE LA VIDA.
A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL.
A47L LAVADO O LIMPIEZA DOMESTICA (cepillos A46B; limpieza de grandes cantidades de botellas o de otros objetos huecos de una sola especie B08B 9/00; lavado de la ropa D06F ); ASPIRADORES EN GENERAL (limpieza en general B08).
A47L 11/00 Máquinas para limpiar los suelos, las alfombras, los muebles, las paredes o sus revestimientos.
A47L 11/24 · Máquinas para barrer el suelo accionadas por motor.
CIP2021: Invenciones publicadas en esta sección.
Procedimiento para controlar la caminata de un robot, y el robot.
(01/01/2020) Un procedimiento para controlar la caminata de un robot, efectuado por un procesador en el robot y que comprende:
controlar (S101) el robot para que camine a lo largo de las paredes de una habitación para obtener una estructura y un tamaño de la habitación;
dividir (S102) un área de la habitación en una pluralidad de áreas de barrido regulares y una pluralidad de áreas de barrido irregulares según la estructura y el tamaño de la habitación, donde un tamaño del área de barrido irregular es menor que un tamaño del área de barrido regular;
controlar (S103) el robot para que barra la pluralidad de áreas de barrido regulares en un modo de caminata de barrido con forma de gancho, donde el modo de caminata de barrido con forma de gancho comprende…
Dispositivo de carga de robot limpiador y método para ensamblar un robot limpiador al dispositivo de carga.
(20/11/2019) Un dispositivo de carga de un robot limpiador, comprendiendo el dispositivo de carga:
un cuerpo principal que comprende una unidad de terminal 5 configurada para cargar el robot limpiador,
definiendo el cuerpo principal un aspecto exterior;
una unidad generadora de señal de inducción dispuesta en un lado del cuerpo principal y dispuesto para transmitir una señal de inducción de retorno al robot limpiador; y un miembro de guía de señal de inducción dispuesto en un lado de la unidad generadora de señal de inducción y dispuesto para incrementar el rendimiento de ensamblaje del robot limpiador mejorando la linealidad de la señal…
Limpieza de pisos autónoma con almohadilla extraíble.
(04/06/2019) Un robot de limpieza de pisos autónomo , que comprende:
un cuerpo del robot ;
un controlador apoyado en el cuerpo del robot ;
un accionamiento que soporta el cuerpo del robot para maniobrar el robot a través de una superficie del piso en respuesta a las órdenes del controlador ;
un soporte de almohadillas unido a la parte inferior del cuerpo del robot y para sostener una almohadilla de limpieza extraíble durante el funcionamiento del robot de limpieza , comprendiendo la almohadilla de limpieza extraíble una placa de montaje y una superficie de montaje , estando unida la placa de montaje a la superficie de montaje ; y
caracterizado en que el robot comprende, además:
un sensor de almohadillas para detectar una característica de identificación…
(22/05/2019). Solicitante/s: LG ELECTRONICS INC.. Inventor/es: KIM, SUNG-GUEN, KIM,BONG-JU, SHIM,IN-BO, SUNG,JI-HOON, YIM,BYUNG-DOO.
Un robot limpiador que comprende:
un cuerpo principal en el que se dispone la unidad de succión de polvo ;
soportes dispuestos en ambos lados de la unidad de succión de polvo; y
un agitador instalado en los soportes para eliminar sustancias extrañas de un área de trabajo, caracterizado por que el agitador comprende un eje de fijación que tiene una forma no circular y que proporciona un centro de rotación, y uno de los soportes incluye una parte de inserción de eje en la que se inserta el eje de fijación , en donde la parte de inserción de eje está rebajada en una forma para corresponder a la del eje de fijación para permitir que el eje de fijación que está alojado a ella, rote junto con la parte de inserción de eje en acoplamiento,
en donde el eje de fijación tiene una forma oval o poligonal cilíndrica.
PDF original: ES-2734382_T3.pdf
ROBOT ASPIRADOR CON SISTEMA DE FREGADO INTELIGENTE.
(17/04/2019). Solicitante/s: Cecotec Research and Development. Inventor/es: ORTS,José, ORTS,César.
1. Robot aspirador con sistema de fregado inteligente comprendido por, un bastidor desplazable, medios de desplazamiento autónomo o semi autónomo , medios de limpieza , medios de filtrado del aire, medios de aspiración, medios de fregado con al menos un depósito de agua , y al menos una mopa , y un circuito de circulación del aire aspirado, caracterizado por tener un sensor de humedad en la mopa , un sensor de llenado en el depósito , y un regulador de caudal de líquido entregado desde el depósito.
PDF original: ES-1228474_U.pdf
Aparato auto-desplazable de limpieza.
(22/03/2019) 1. Aparato auto-desplazable de limpieza que comprende al menos
un bastidor desplazable con respecto a una superficie a limpiar,
medios de desplazamiento autónomo o semi-autónomo, medios de limpieza, medios de aspiración y medios de fregado que comprenden al menos un depósito de agua para limpieza de suelos,
y al menos una mopa ubicada inferiormente en el aparato y en contacto al menos parcialmente con la superficie,
un sistema de control conectado operativamente a los medios de desplazamiento y a los medios de fregado;
en el que el sistema de control está configurado para hacer funcionar el aparato en uno o varios modos de funcionamiento y/o comportamiento sucesivos y/o alternativos
caracterizado porque comprende al menos un primer modo de funcionamiento…
Limpieza de pisos autónoma con almohadilla extraíble.
(20/02/2019). Solicitante/s: IROBOT CORPORATION. Inventor/es: WILLIAMS,MARCUS, LU,PING-HONG, JOHNSON,JOSEPH M, FORAN,DANIEL, GRAZIANI,ANDREW.
Un conjunto de almohadillas de limpieza de robots autónomos (120; 800E; 1000; 1200; 300) de diferentes tipos, comprendiendo cada una de las cuales:
un cuerpo de almohadilla que tiene superficies amplias opuestas, que incluyen una superficie de limpieza y una superficie de montaje;
una característica de identificación del tipo de almohadilla indicativa de un tipo de almohadilla de limpieza; y
una placa de montaje (802E; 1006; 1206; 1306) asegurada a través de la superficie de montaje del cuerpo de la almohadilla y que comprende un recorte (803E, 1012, 1212, 1305) que define al menos en parte la característica de identificación del tipo de almohadilla , habilitando la placa de montaje un sensor de almohadilla de un robot , cuando la almohadilla de limpieza se monta en el robot, para detectar la característica de identificación del tipo de almohadilla.
PDF original: ES-2726712_T3.pdf
Disposición de accionamiento para un robot móvil.
(24/09/2018). Solicitante/s: DYSON TECHNOLOGY LIMITED. Inventor/es: VANDERSTEGEN-DRAKE,MARK, BOTT,PAUL.
Una disposición de accionamiento para un robot móvil que comprende una carcasa de accionamiento adaptada para ser montada sobre un chasis de un robot móvil y que incluye un motor de accionamiento conectado de manera operativa a un árbol de accionamiento que se extiende desde la carcasa de accionamiento a lo largo de un eje de accionamiento, un elemento de articulación montado de forma giratoria a la carcasa de accionamiento alrededor de un eje de pivote, una primera rueda soportada por el árbol de accionamiento , una segunda rueda soportada por el elemento de articulación , y un medio para la transmisión del accionamiento desde la primera rueda a la segunda rueda , caracterizada porque a lo largo de todo el intervalo de movimiento de rotación del elemento de articulación, una parte inferior de la primera rueda está adaptada para ser elevada por encima de una parte inferior de la segunda rueda.
PDF original: ES-2683018_T3.pdf
Sistema de accionamiento para un aparato de limpieza así como aparato de limpieza.
(01/03/2017) Sistema de accionamiento para el accionamiento de un aparato automático de limpieza, que comprende:
- una unidad de soporte ;
- un motor de accionamiento fijado en la unidad de soporte ;
- un árbol de accionamiento , que está dispuesto de forma giratoria en la unidad de soporte y puede ser accionado por el motor de accionamiento ; y
- una instalación de avance , que está dispuesta en el árbol de accionamiento y es giratoria alrededor del árbol de accionamiento,
de manera que la instalación de avance está acoplada con el árbol de accionamiento , para generar un avance transversalmente a la extensión…
(08/06/2016). Solicitante/s: LG ELECTRONICS INC.. Inventor/es: KIM, SUNG-GUEN, KIM,BONG-JU, SHIM,IN-BO, SUNG,JI-HOON, YIM,BYUNG-DOO.
Un robot limpiador que comprende:
un cuerpo principal en el que se dispone la unidad de succión de polvo ;
soportes dispuestos en ambos lados de la unidad de succión de polvo; y
un agitador instalado en los soportes para eliminar sustancias extrañas de un área de trabajo, caracterizado por que el agitador comprende ejes de fijación que tienen una forma no circular y que proporcionan un centro de rotación y los soportes comprenden una parte de inserción de eje en la que se inserta el eje de fijación y
uno de los soportes tiene una abertura en una superficie lateral para formar un agujero de acoplamiento de manera que uno de los ejes de fijación se puede insertar a través del mismo,
en donde una distancia entre los soportes es equivalente a una longitud del agitador excluyendo los ejes de fijación y menor que una longitud de agitador incluyendo los ejes de fijación.
PDF original: ES-2582006_T3.pdf
Dispositivo de carga de robot limpiador.
(10/03/2016) Un dispositivo de carga de un robot limpiador, comprendiendo el dispositivo de carga:
un cuerpo principal que comprende una unidad de terminal configurada para cargar el robot limpiador, definiendo el cuerpo principal un aspecto exterior;
una unidad generadora de señal de inducción dispuesta en un lado del cuerpo principal para transmitir una señal de inducción de retorno al robot limpiador; y un miembro de guía de señal de inducción dispuesto en un lado de la unidad generadora de señal de inducción para incrementar el rendimiento de ensamblaje del robot limpiador mejorando la linealidad de la señal de inducción,
en que la unidad generadora de señal de inducción comprende al menos un par de sensores de inducción de…
(19/08/2015) Aparato barredor móvil con un cepillo barredor , un recinto colector de suciedad asociado , un equipo de aplicación de líquido , que está dispuesto detrás del cepillo barredor en la dirección de traslación (r), y un equipo de deshumectación , estando dispuesto un equipo de limpieza delante del equipo de deshumectación , caracterizado por que el equipo de deshumectación está dispuesto detrás del equipo de aplicación de líquido , por que el equipo de limpieza es un rodillo de limpieza y por que el rodillo de limpieza está forrado con un paño de limpieza .
Robot Autónomo de Cubrimiento.
(01/10/2014) Un robot autónomo de cubrimiento comprende:
un sistema de tracción configurado para maniobrar el robot de acuerdo con una configuración de partida y una configuración de velocidad;
un sensor de parachoques sensible a una colisión del robot con un obstáculo en una dirección delantera; y caracterizado porque comprende adicionalmente
un sensor de proximidad sensible a un obstáculo potencial en la dirección delantera del robot;
en el que el sistema de tracción se configura para reducir la configuración de velocidad en respuesta a una señal desde el sensor de proximidad que indica la detección de un obstáculo potencial, mientras que continúa avanzando el robot de acuerdo con la configuración de partida; y
en el que el sistema de tracción…
Máquina para limpiar residuos sólidos adheridos a superficies.
(06/05/2014) 1. Máquina para limpiar residuos sólidos adheridos a superficies, caracterizada porque en un soporte con ruedas , montamos una caja con un motor , a cuyo eje (f), acoplamos una rueda abrasiva .
2. Máquina para limpiar residuos sólidos adheridos a superficies según reivindicación 1ª, caracterizada porque cuando usamos escobillas abrasivas (c y d) tenemos la posibilidad de inclinar el motor.
3. Máquina para limpiar residuos sólidos adheridos a superficies según reivindicaciones 1ª y 2ª, caracterizada porque el motor lo podemos sustituir por una taladradora o una amoladora acoplada a la caja .
4. Máquina para limpiar residuos sólidos adheridos a superficies según reivindicación 1ª, caracterizada porque sobre la caja colocamos una segunda caja sujeta al soporte , donde va una aspiradora. La tolva de la aspiradora…
Aplicador de producto de acabado de suelos.
(17/10/2013) Un aplicador de producto de acabado de suelos que comprende:
un carrito con ruedas que incluye un miembro de carcasa construido y adaptado para recibir una fuente de producto de acabado de suelos;
una mopa aplicadora de producto de acabado de suelos acoplada al carrito ;
un dispositivo de bomba conectado al miembro de carcasa;
un segundo conducto adaptado para ser conectado a dicha fuente de producto de acabado de suelos yal dispositivo de bomba , caracterizado por que el dispositivo de bomba comprende una bomba peristáltica,y por que está construido y dispuesto un conjunto de transmisión para accionar la bomba peristáltica por medio delmovimiento de las ruedas .
(19/09/2013) Un robot de amplia cobertura que comprende:
un chasis ;
múltiples conjuntos de rueda motriz (110a-b) dispuestos sobre el chasis ,
comprendiendo cada conjunto de rueda motriz:
una carcasa del conjunto de rueda motriz (324a-b);
una rueda (326a-b) acoplada giratoriamente a la carcasa (324a-b); y
un motor de accionamiento de rueda (328a-b) situado en la carcasa del conjunto de rueda motriz (324a-b) y quefunciona para accionar la rueda (326a-b); y
un conjunto de limpieza situado en el chasis comprendiendo el conjunto de limpieza:una carcasa del conjunto de limpieza ;
un cabezal de limpieza acoplado giratoriamente a la carcasa del conjunto de limpieza ; yun motor de accionamiento de limpieza situado en la carcasa…
(17/07/2013) Un robot de amplia cobertura que comprende:
un chasis unitario que define una pluralidad de receptáculos que reciben módulos teniendo cada uno un enchufe eléctrico del lado del receptáculo que funciona sin herramientas;un controlador configurado para proporcionar un control eléctrico independiente a cada enchufe eléctrico del lado del receptáculo que funciona sin herramientas; y
una cubierta inferior para la retención de la batería recibida dentro de un receptáculo ;
al menos uno de los receptáculos recibe un módulo de la rueda motriz (110a-b) fácilmenteextraíble del chasis como una unidad completa cuando ya no está asegurada por la cubierta inferior ,comprendiendo el módulo de la rueda motriz (110a-b):
una carcasa del módulo de rueda motriz (324a-b);
una rueda (326a-b)…
Aparato barredor automotor o desplazable y combinación de un aparato barredor con una estación base.
(02/05/2012) Aparato barredor automotor con una estación base en la que se estaciona el aparato barredor en casode no utilización, por ejemplo para la recarga de acumuladores , presentando el aparato barredor un cepillobarredor y un recinto colector de polvo asociado , caracterizado por un mecanismo de aplicación delíquido que está dispuesto detrás del cepillo barredor , considerado en la dirección de desplazamiento (r), y unmecanismo de deshumectación dispuesto más atrás que dicho cepillo, y porque en la estación base estáprevisto un dispositivo de limpieza para el cepillo barredor y/o para el mecanismo de deshumectación .
MAQUINA PARA LA LIMPIEZA DE SUELOS.
(28/09/2010) Máquina para la limpieza de suelos, que se puede desplazar sobre el suelo que hay que limpiar, con un dispositivo de limpieza para la recogida de suciedad del suelo, así como con dos escobas laterales (20, 20') que se pueden accionar de forma giratoria para el transporte de la suciedad a la zona de recogida del dispositivo de limpieza, que están sujetas, en cada caso, a una disposición de brazo de sujeción (22; 22'), que está dispuesta de manera que pueda girar en el bastidor de la máquina y en la que engarza un dispositivo de ajuste (24; 24'), mediante el cual la escoba lateral (20, 20') puede ser conducida hacia una posición lateral deseada con respecto a la zona de actuación del dispositivo de limpieza , presentando cada dispositivo de ajuste una pieza de conexión…
MAQUINA BARREDORA MEJORADA.
(16/07/2004) Barredora a motor que comprende un armazón debajo del cual se dispone por lo menos un cepillo cónico lateral frontal giratorio que puede inclinarse sobre un eje vertical, una rueda motriz hacia la parte posterior del mismo, conectada a los medios de control de giro, un cepillo cilíndrico horizontal transversal dispuesto abatido hacia la parte posterior, para dirigir las ruedas hacia la parte posterior del mismo, y un recipiente de recogida de suciedad posterior, manteniéndose dicho por lo menos un cepillo cónico en su posición de trabajo mediante unos medios elásticos , caracterizada porque entre la unidad directriz de la máquina y la estructura de soporte para dicho por lo menos un cepillo cónico se interpone un…
SISTEMA PARA MONTAR UN MOTOR EN UN VEHICULO.
(16/07/1994). Solicitante/s: AAR CORPORATION. Inventor/es: KNOWLTON, CHRISTOPHER MARK, O\'HARA, ROBERT JAMES.
UNA BARREDORA U OTRO VEHICULO UTILIZARLO, (DE SERVICIO PUBLICO) QUE TIENE COLOCADO UN MOTOR/MAQUINA, MEDIANTE EL/LA CUAL, EL Y SUS ACCESORIOS, ROTAN ALREDEDOR DE UN EJE VERTICAL FUERA DEL VEHICULO A UNA POSICION MAS ACCESIBLE PARA EL MANTENIMIENTO Y SIMILARES. SE SUMINISTRAN APARATOS PARA GRAPAR O SUJETAR EL MOTOR/MAQUINA EN SU POSICION NORMAL DE TRABAJO, Y UN MECANISMO TRABADOR DE SEGURIDAD ASEGURA QUE LOS CIRCUITOS DE ENCENDIDO Y/O PUESTA EN MARCHA SON DESCONECTADOS CUANDO EL MOTOR/MAQUINA ES GIRADO A SU POSICION MAS ACCESIBLE.
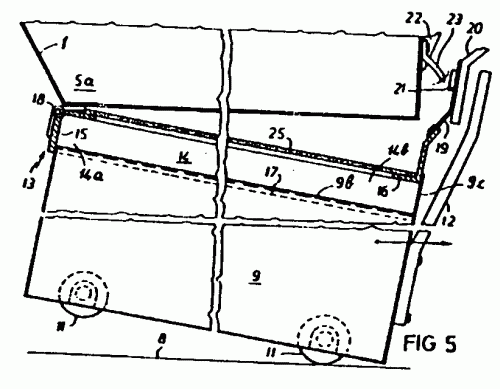
PERFECCIONAMIENTOS EN UNA MAQUINA BARREDERA PARA SUELOS Y SUPERFICIES DELIMITADAS.
(01/11/1991). Ver ilustración. Solicitante/s: DULEVO, S.P.A. Inventor/es: ZONI, SERGIO.
PERFECCIONAMIENTOS EN UNA MAQUINA BARREDERA PARA SUELOS Y SUPERFICIES DELIMITADAS. CONSISTEN EN UN CONTENEDOR AMOVILE PARA LA RECOGIDA DE LOS DESPERDICIOS BARRIDOS, QUE, PARA ACOPLARLO AL BASTIDOR DE LA MAQUINA, COMPRENDE UNAS GUIAS OSCILANTES ACOPLADAS A TRAVES DE ORGANOS DE ARTICULACION A UNA ZONA CENTRAL DEL BASTIDOR EXTENDIDAS EN SENTIDO TRANSVERSAL AL EJE LONGITUDINAL DE LA MAQUINA Y QUE COOPERAN DE MANERA QUE DEFINEN UN BASTIDOR INTERPUESTO A TOPE ENTRE UN GRUPO ASPIRANTE (5A) EN EL CITADO BASTIDOR Y UNA BOCA DE ASPIRACION (9B) DEL CITADO CONTENEDOR , ELEMENTOS DE ENGANCHE POR GATILLOS PREVISTOS ENTRE EL BASTIDOR Y LAS GUIAS OSCILANTES , Y ORGANOS DE PRESION SALIENTES DEL BASTIDOR QUE ACTUAN POR REACCION ELASTICA SOBRE EL CONTENEDOR.
APARATO PARA EL MANTENIMIENTO DE SUELOS.
(16/08/1989) APARATO PARA EL MANTENIMIENTO DE SUELOS, DEL TIPO CONSTITUIDO POR UN BASTIDOR PORTANTE DE UN CEPILLO MOTORIZADO, UN MONTANTE-MANGO CON UN MANILLAR SUPERIOR, CARACTERIZADO ESENCIALMENTE POR LA PROVISION, SOBRE EL BASTIDOR DEL APARATO, DE POR LO MENOS UN RECIPIENTE CONTENEDOR DE UN PRODUCTO PARA EL TRATAMIENTO DE PAVIMENTOS, ALOJADO EN EL INTERIOR DE UN SOPORTE JAULA SOLIDARIO DEL BASTIDOR, Y, EN LAS PROXIMIDADES EN EL MANILLAR, UN COMPONENTE NEUMATICO EN FORMA DE PERA ELASTICA ASOCIADA A UN SOPORTE EN FORMA DE EMBUDO, RELACIONADO POR SU EXTREMO Y MEDIANTE UN CONDUCTO TUBULAR FLEXIBLE CON UNA BOQUILLA DE ENTRADA EN EL RECIPIENTE SITUADO SOBRE EL BASTIDOR, PROLONGANDOSE INTERIORMENTE EN UN SEGUNDO TRAMO TUBULAR CARACTERISTICAMENTE UN BUCLE SUPERIOR Y SE PROLONGA HASTA LAS PROXIMIDADES DEL FONDO, COMPORTANDO EL PROPIO…
PERFECCIONAMIENTOS EN UNA BARREDERA MECANICA PARA SUELOS.
(01/02/1983) BARREDERA MECANICA DE SUELOS. COMPRENDE UNA CARCASA CON UN CEPILLO CILINDRICO ALOJADO EN FORMA ROTATIVA DENTRO DE ELLA Y QUE ES ACCIONADO POR RUEDAS MOTRICES QUE ACTUAN A TRAVES DE PIÑONES . EL CEPILLO CILINDRICO SE ALOJA CON DOS ABRAZADERAS DE COJINETE QUE SE SUJETAN SOBRE LA CARCASA EN UNA PARTE DE PARED DE LA MISMA DIRIGIDA HACIA ABAJO. LAS ABRAZADERAS ESTAN CONSTITUIDAS POR PINZAS EN FORMA DE U DE ACERO DE RESORTES CON SUS DOS BRAZOS , DISPONIENDO EL INTERIOR DE UN ALOJAMIENTO DE COJINETE Y EL EXTERIOR DE UNA ESCOTADURA PARA PASO DEL ALOJAMIENTO DE COJINETE. EL BRAZO INTERIOR CON EL ALOJAMIENTO DE COJINETE SE ASIENTA SOBRE UN TACON DEL REBAJE DEL PIÑON Y SOBRE UN REBAJE DE LA PARED , IMPIDIENDO ASI TANTO…
PERFECCIONAMIENTOS EN UNA BARREDERA MECANICA DE SUELOS.
(01/02/1983). Solicitante/s: LEIFHEIT INTERNATIONAL GUNTER LEIFHEIT GMBH.
BARREDERA MECANICA DE SUELOS. CONSTITUIDA POR UNA CARCASA QUE EXTERIORMENTE ALOJA UN ESTRIBO PARA EL MANGO Y EMPUÑADURA DE ACCIONAMIENTO, Y QUE INTERIORMENTE ALOJA LOS CEPILLOS BARREDORES Y LAS RUEDAS MOTRICES QUE PERMITEN EL MOVIMIENTO SOBRE EL SUELO Y EL ACCIONAMIENTO DE LOS CEPILLOS. EL CEPILLO PRINCIPAL ES CILINDRICO Y EN LOS EXTREMOS DE SU EJE TIENE UNOS PIÑONES QUE SON ACCIONADOS POR LAS RUEDAS MOTRICES . SE DISPONEN CEPILLOS ADICIONALES GIRATORIOS ALREDEDOR DE UN EJE VERTICAL EN CADA ESQUINA DELANTERA DE LA BARREDERA ACCIONADOS POR RUEDAS MOTRICES PARA ABARCAR LAS ZONAS LATERALES QUE QUEDAN FUERA DE LA ACCION DEL CEPILLO PRINCIPAL. CADA DOS RUEDAS MOTRICES PERTENECIENTES A UN PIÑON SE ALOJAN EN UNA CAJA DE RUEDAS QUE ES DESPLAZABLE VERTICALMENTE DENTRO DE LA CARCASA, PARA REGULAR LA ALTURA DEL CEPILLO.
PERFECCIONAMIENTOS EN UNA BARREDERA MECANICA DE SUELOS.
(01/02/1983). Solicitante/s: LEIFHEIT INTERNATIONAL GUNTER LEIFHEIT GMBH.
BARREDERA MECANICA DE SUELOS. COMPRENDE UNA CARCASA QUE ALOJA UN CEPILLO CILINDRICO ROTATIVO, ACCIONADO POR DOS RUEDAS MOTRICES A TRAVES DE UNOS PIÑONES, Y DISPONE DE UNOS CEPILLOS ADICIONALES PARA ABARCAR LAS ZONAS NO ALCANZADAS POR EL CEPILLO CILINDRICO. EL CEPILLO CILINDRICO ESTA DISPUESTO ENTRE DOS RECINTOS COLECTORES DE SUCIEDAD FORMADOS POR DOS RECIPIENTES COLECTORES DE SUCIEDAD QUE ESTAN CERRADOS POR TODAS PARTES EXCEPTO POR UNA ABERTURA DE ENTRADA DE SUCIEDAD FRENTE AL CEPILLO . LOS DOS RECINTOS FORMAN UNA UNIDAD CONSTRUCTIVA AL ESTAR UNIDOS POR UNA PARED SUPERIOR COMUN EN LA QUE ESTA PREVISTA UNA PALANCA PIVOTANTE PARA PODER EXTRAERLOS COMO UNA PIEZA DE LA CARCASA. UN ENCLAVAMIENTO ELASTICO EN FORMA DE U REALIZADO CON ALAMBRE PARA MUELLES, ASEGURA LOS RECIPIENTES EN SU POSICION DE TRABAJO Y EL PASE A LA POSICION DE DESPRENDIMIENTO, POR ACCION DE LA PALANCA AL ELEVARSE.
DISPOSITIVO DE LIMPIEZA PERFECCIONADO.
(16/02/1981). Solicitante/s: MORA CASTEL,M.ADORATRI.
1. Dispositivo de limpieza perfeccionado, del tipo que está constituido por una carcasa en cuyo interior se aloja un electromotor que comanda a un eje central al que se acopla axialmente un cuerpo discoidal provisto de cuerpos pilosos a modo de cepillo, caracterizado esencialmente porque dicho eje central conecta mediante una correa con otros ejes conducidos, dispuestos equidistantes, en los que se acoplan cuerpos discoidales de menor diámetro provistos de cuerpos pilosos; siendo el acoplamiento de los cuerpos discoidales respecto a los ejes mediante una extensión tubular almenada provista de regruesamientos interiores que encajan en una entalla prevista en el eje correspondiente y estando dispuestos los ejes conducidos en puntos angulares con respecto a la carcasa de modo que en posición de trabajo ataquen las zonas comprendidas en los rincones. 2. Dispositivo de limpieza perfeccionado.
{kind=link}