Dispositivo de carga de robot limpiador y método para ensamblar un robot limpiador al dispositivo de carga.
Un dispositivo de carga de un robot limpiador, comprendiendo el dispositivo de carga:
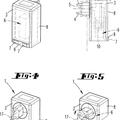
un cuerpo principal (10) que comprende una unidad de terminal 5 (200) configurada para cargar el robot limpiador,
definiendo el cuerpo principal un aspecto exterior;
una unidad generadora de señal de inducción (160) dispuesta en un lado del cuerpo principal (10) y dispuesto para transmitir una señal de inducción de retorno al robot limpiador; y un miembro de guía de señal de inducción (140) dispuesto en un lado de la unidad generadora de señal de inducción (160) y dispuesto para incrementar el rendimiento de ensamblaje del robot limpiador mejorando la linealidad de la señal de inducción, caracterizado por que la unidad generadora de señal de inducción (160) comprende al menos un par de sensores de inducción de acceso (162) dispuestos para transmitir una señal para guiar al robot limpiador hacia una posición de retorno, y al menos un sensor de inducción de ensamblaje (164) dispuesto para guiar al robot limpiador hacia una posición de ensamblaje transmitiendo una señal de inducción de ensamblaje, en que el sensor de inducción de ensamblaje está dispuesto entre los sensores de inducción de acceso,
en que el miembro de guía de señal de inducción (140) comprende: una guía (142) que rodea el sensor de inducción de ensamblaje (164),
en que el miembro de guía de señal de inducción (140) comprende además al menos un par de unidades de reflexión (144) dispuestas para mejorar la linealidad restringiendo un ángulo de transmisión de la señal de inducción de ensamblaje, y
en que al menos un par de unidades de reflexión (144) sobresalen hacia dentro desde la guía (142) y se enfrentan entre sí para formar una capa con una abertura central dispuesta para proporcionar un camino óptico para la luz emitida por el sensor de inducción de ensamblaje (164).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E15184935.
Solicitante: LG ELECTRONICS INC..
Nacionalidad solicitante: República de Corea.
Dirección: 128, Yeoui-daero, Yeongdeungpo-gu Seoul 150-721 REPUBLICA DE COREA.
Inventor/es: KIM, SUNG-GUEN, KIM,BONG-JU, SHIM,IN-BO, SUNG,JI-HOON, YIM,BYUNG-DOO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A47L11/24 NECESIDADES CORRIENTES DE LA VIDA. › A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL. › A47L LAVADO O LIMPIEZA DOMESTICA (cepillos A46B; limpieza de grandes cantidades de botellas o de otros objetos huecos de una sola especie B08B 9/00; lavado de la ropa D06F ); ASPIRADORES EN GENERAL (limpieza en general B08). › A47L 11/00 Máquinas para limpiar los suelos, las alfombras, los muebles, las paredes o sus revestimientos. › Máquinas para barrer el suelo accionadas por motor.
- A47L9/28 A47L […] › A47L 9/00 Partes constitutivas o accesorios de aspiradores, p. ej. medios mecánicos para controlar la aspiración o para producir una acción de batido; Dispositivos para la conservación ordenada de los aspiradores o de sus piezas; Vehículos portadores especialmente concebidos para los aspiradores. › Montaje del equipo eléctrico, p. ej. adaptación o fijación al aspirador; Control de los aspiradores por medios eléctricos.
- B25J13/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 13/00 Controles para manipuladores (controles por programa B25J 9/16). › por medio de dispositivos sensores, p. ej. a la visión o al tacto.
- G05D1/12 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control para la búsqueda de un objetivo.
PDF original: ES-2764108_T3.pdf
Patentes similares o relacionadas:
Aparato de limpieza, así como accesorio para la unión a un dispositivo de base del aparato de limpieza, del 17 de Junio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Accesorio configurado como un cepillo de alfombra o como un accesorio de suelo duro para una aspiradora o como un accesorio de limpieza en mojado para […]
Estación de evacuación, del 17 de Junio de 2020, de IROBOT CORPORATION: Un robot móvil que comprende: un cuerpo configurado para atravesar una superficie y recibir residuos desde […]
Aparato de limpieza de suelos y procedimiento de funcionamiento del mismo, del 29 de Abril de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza de suelos , por ejemplo un aspirador de polvo manualmente guiado, que comprende […]
Sistema y un procedimiento para la limpieza de un suelo con un robot de limpieza, del 22 de Abril de 2020, de VORWERK & CO. INTERHOLDING GMBH: Sistema para la limpieza de un suelo - con al menos un robot de limpieza y - con medios de control para el control del robot de limpieza […]
Aparato de tratamiento de suelos dotado de traslación automática, del 4 de Marzo de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato de tratamiento de suelos dotado de traslación automática, especialmente robot de limpieza, que comprende un elemento de tratamiento de […]
Robot de limpieza con un dispositivo para detectar una colisión, del 26 de Febrero de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato de tratamiento de superficies dotado de movilidad automática, especialmente robot de limpieza, que comprende una carcasa y un dispositivo […]
Aparato electrodoméstico y procedimiento para el funcionamiento de un aparato electrodoméstico, del 5 de Febrero de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato electrodoméstico , que comprende: - al menos un acumulador de energía eléctrica diseñado para alimentar con potencia eléctrica […]
 Estación de carga, especialmente para un aparato de limpieza, del 29 de Enero de 2020, de VORWERK & CO. INTERHOLDING GMBH: Estación de carga , especialmente para un aparato de limpieza , que comprende una carcasa de dicha estación, un elemento de acometida de la red, especialmente […]
Estación de carga, especialmente para un aparato de limpieza, del 29 de Enero de 2020, de VORWERK & CO. INTERHOLDING GMBH: Estación de carga , especialmente para un aparato de limpieza , que comprende una carcasa de dicha estación, un elemento de acometida de la red, especialmente […]